一.建立AI基本三件套
1.建立AI基本三件套

二.使用AI的基本设置
1.打开我们想要用的AI宠物的蓝图,选中自我Actor,右侧细节处找到AI,选中对应的AI控制器


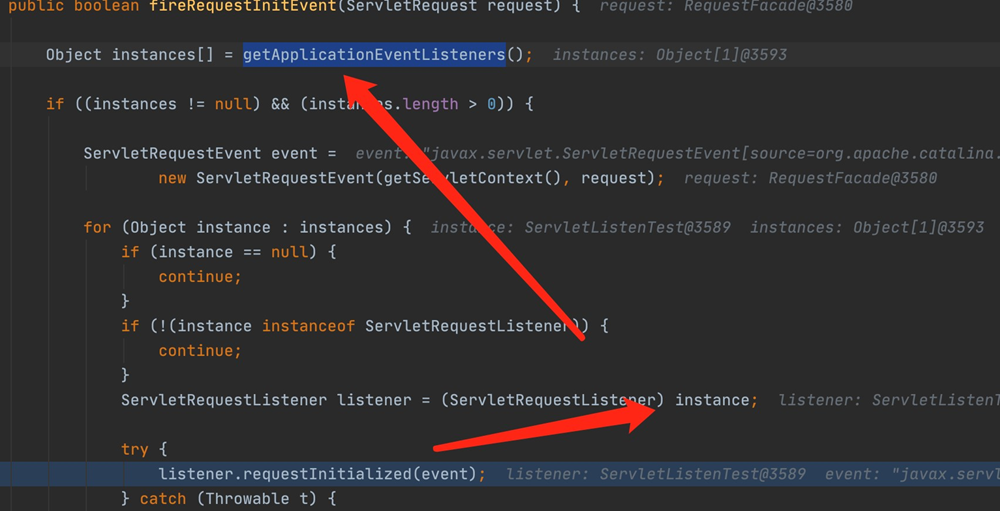
三.打开AI控制器
写如下
四,AI行为树
1.新建一个任务,命名含巡逻二字即可

2.打开黑板,建立一个巡逻向量

3.打开刚刚创建的巡逻task任务
创建一个函数,命名如下,并编写以下变量和蓝图


打开事件图表
编写如下

4.打开行为树,再创建一个task,命名含速度设置即可,用于限制宠物ai的速度
打开创建的速度设置task
链接按类获取组件时选择下面第二个,第一个是数组


还有速度默认值,不要忘记设置了,设置它的速度大小,并勾选可编辑实例和生成时公开


五,打开ai行为树
编写如下

注意,move to要选中巡逻目的地为黑板键

六,我们还要在主界面,给ai宠物设置导航网格体边界体积

运行一下可以在1000半径的范围内移动
但我们想要跟随角色还需要操作
打开巡逻的task,再打开函数把布尔改成do once,这个手上改错的,我错了

7.打开宠物ai的角色蓝图,编写如下

选中该变量,右侧细节

记得编译一下,这样就可以多选地点组,如下

打开地图主界面,找到目标点,拖入地图,拖三个


选中宠物ai,在右侧细节处,找到默认里,有我们创建的巡逻地点组,我这里拖进了三个目标点,所以创建三个巡逻地点
回到行为树,创建一个固定点移动的task,打开编写


回到行为树黑板,创建一个变量为整数的巡逻点序列

六,定点巡逻蓝图编写
创建四个函数,分别命名为增加巡逻点序列,减少巡逻序列,设置巡逻点,开始定点巡逻
逻辑三段:正方向巡逻,反方向巡逻以及正方向巡逻是否到头
前面三个巡逻函数为巡逻三段准备条件
并编写如下

打开增加巡逻点序列

打开减少巡逻点序列

打开设置巡逻点

打开开始定点巡逻
以下开始编写三段巡逻逻辑
首先判断是否在原点

如果在原点,为真,走上面一段,编写以下蓝图

如果为假,走下面一段,反方向巡逻

最后一段,就是过程中是否走到最后一个巡逻点,如果没走到为假,走上面一段,如果走到了为真,走反方向下面的一段
我这里有个错误,下面的巡逻目的地是错的,应改为巡逻点序列

这两个变量选中,右侧细节,设为可编辑实例和生成公开



最后打开事件图表链接上开始定点巡逻函数

九,打开行为树,添加一个固定点移动的task

选中固定点序列task,右侧细节处,如下

运行测试一下
如果错了,那你一定有地方没注意到,我是可以的