空中三角测量指的是根据少量控制点坐标,利用空间前后交汇,对六个外方位要素进行解算,从而获得大量未知点坐标及图像外方位要素。空三测量精度是整个摄影测量过程中的关键环节,空三解算的精度直接影响到数字正射图像、实景三维模型等数字化成果的质量。在空三加密的平差解算中,主要有三种方法:光束法、航带法和独立模型法。独立模型法是通过对单独的模型进行计算,获得模型的点坐标和摄站点坐标,在相互连接每个单模型之后,构成一个区域网模型,再经过严密平差,获得结果,这种方法在解算过程中,会出现较多的未知项。航带法空中三角测量研究的对象是一条航带的模型,也就是,先把由多个立体像对组成的单一模型连接起来,形成航带模型,再把这些单一模型连接起来,形成航带自由网,最后把航带模型当成一个单元模型,来对航带网进行绝对定向,这种方法具有很高的解算效率,而且对硬件的要求也很低,但是它的解算精度并不高。光束法以单张相片组成的光束为基本单元,它的核心是共线方程,每一条光束通过旋转和平移,使得各单元的公共点光线实现交会,进而将整体纳入到地面坐标系中,用平差解算出结果,该方法获取的模型坐标数据精度的最高[46,47]。从理论上讲,从理论上来说,光束法要比其他方法更严密、更精确,因此它被广泛应用于空三加密过程中。光束法区域网平差的基本原理如图2.5所示:




技术理论||02空中三角测量
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/473364.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

OpenTelemetry 赋能DevOps流程的可观测性革命
作者:天颇 引言
在当今快节奏的软件开发和运维环境中,DevOps 已经成为主流,它通过整合开发和运维流程,推动着软件的快速迭代和持续交付。然而,随着微服务、容器化和云计算等技术的普及,系统复杂性急剧增加…

大数据如何助力干部选拔的公正性
随着社会的发展和进步,干部选拔成为组织管理中至关重要的一环。传统的选拔方式可能存在主观性、不公平性以及效率低下等问题。大数据技术的应用,为干部选拔提供了更加全面、精准、客观的信息支持,显著提升选拔工作的科学性和公正性。以下是大…

风电电力系统低碳调度论文阅读第一期
在碳交易市场中,历史法和基准线法是用于分配碳排放配额的两种主要方法。以下是两种方法的公式及其解释: 区别总结
历史法:基于历史排放量,分配具有较强的公平性但可能缺乏激励减排。基准线法:基于行业基准和生产量&am…

PHP代码审计 --MVC模型开发框架rce示例
MVC模型开发框架 控制器Controller:负责响应用户请求、准备数据,及决定如何展示数据 模块Model:管理业务逻辑和数据库逻辑,提供链接和操作数据库的抽象层 视图View:负责前端模板渲染数据,通过html呈现给用户…

RT-Thread 星火1号学习笔记
LED 闪烁例程
硬件说明
LED 连接在开发板的某个 GPIO 端口上,通过控制该端口的高低电平来实现 LED 的亮灭。
软件说明
初始化 GPIO 端口
/* 配置 LED 灯引脚 */
#define PIN_LED_B GET_PIN(F, 11) // PF11 : LED_B --> LED
#defi…

c++调用 c# dll 通过 clr (详细避坑)
项目场景:
.NET Framework 4.7.2 需要在纯C项目中调用C# 的DLL C# DLL 在.NET core 或者 .NET 8 中无法使用AOT正常导出DLL 解决方案:
通过 用 C/clr 项目中转 来调用 1.在c# .NET Framework项目中把接口写好, 这里不推荐使用 .NET 8&#…

【动手学深度学习Pytorch】1. 线性回归代码
零实现 导入所需要的包:
# %matplotlib inline
import random
import torch
from d2l import torch as d2l
import matplotlib.pyplot as plt
import matplotlib
import os构造人造数据集:假设w[2, -3.4],b4.2,存在随机噪音&…
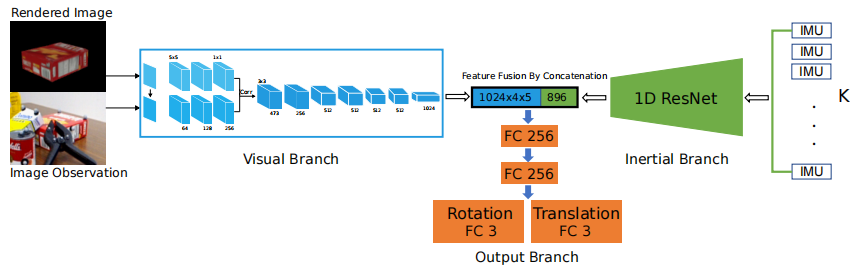
论文笔记(五十六)VIPose: Real-time Visual-Inertial 6D Object Pose Tracking
VIPose: Real-time Visual-Inertial 6D Object Pose Tracking 文章概括摘要I. INTRODACTIONII. 相关工作III. APPROACHA. 姿态跟踪工作流程B. VIPose网络 文章概括
引用:
inproceedings{ge2021vipose,title{Vipose: Real-time visual-inertial 6d object pose tra…

web——upload-labs——第三关——后缀黑名单绕过
上传一个正常的一句话木马,判断一下验证类型 响应后返回提示不允许上传.asp,.aspx,.php,.jsp后缀文件!
且查看网页源代码中并没有前端验证机制,所以可以判断这道题是后端验证
使用burp
提示无法上传.php结尾的文件,但我们的一句…
LeetCode题解:18.四数之和【Python题解超详细】,三数之和 vs. 四数之和
题目描述 给你一个由 n 个整数组成的数组 nums ,和一个目标值 target 。请你找出并返回满足下述全部条件且不重复的四元组 [nums[a], nums[b], nums[c], nums[d]] (若两个四元组元素一一对应,则认为两个四元组重复):
…

如何利用SAP低代码平台快速构建企业级应用?
SAP作为全球领先的企业管理软件解决方案提供商,一直致力于为企业提供全面且高效的业务管理工具。随着技术的快速发展,传统的开发方式已经无法满足企业在快速变化的市场环境下的需求。低代码开发平台应运而生,它通过简化应用程序的创建过程&am…

C++11(四)---可变参数模板
文章目录 可变参数模板 可变参数模板 参数包代表多个类型和参数 // Args是一个模板参数包,args是一个函数形参参数包
// 声明一个参数包Args...args,这个参数包中可以包含0到任意个模板参数。
template <class ...Args>
void ShowList(Args... arg…

基于Springboot+Vue的中国蛇类识别系统 (含源码数据库)
1.开发环境
开发系统:Windows10/11 架构模式:MVC/前后端分离 JDK版本: Java JDK1.8 开发工具:IDEA 数据库版本: mysql5.7或8.0 数据库可视化工具: navicat 服务器: SpringBoot自带 apache tomcat 主要技术: Java,Springboot,mybatis,mysql,vue
2.视频演示地址
3.功能
这个系…

大数据新视界 -- 大数据大厂之 Impala 性能飞跃:分区修剪优化的应用案例(下)(22 / 30)
💖💖💖亲爱的朋友们,热烈欢迎你们来到 青云交的博客!能与你们在此邂逅,我满心欢喜,深感无比荣幸。在这个瞬息万变的时代,我们每个人都在苦苦追寻一处能让心灵安然栖息的港湾。而 我的…

ES6标准-Promise对象
目录
Promise对象的含义
Promise对象的特点
Promise对象的缺点
Promise对象的基本用法
Promise对象的简单例子
Promise新建后就会立即执行
Promise对象回调函数的参数
Promise参数不会中断运行
Promise对象的then方法
Promise对象的catch()方法
Promise状态为resolv…

【目标检测】【Ultralytics-YOLO系列】Windows11下YOLOV5人脸目标检测
【目标检测】【Ultralytics-YOLO系列】Windows11下YOLOV5人脸目标检测 文章目录 【目标检测】【Ultralytics-YOLO系列】Windows11下YOLOV5人脸目标检测前言YOLOV5模型运行环境搭建YOLOV5模型运行数据集准备YOLOV5运行模型训练模型验证模型推理 总结 前言
Ultralytics YOLO 是一…

使用Axios函数库进行网络请求的使用指南
目录 前言1. 什么是Axios2. Axios的引入方式2.1 通过CDN直接引入2.2 在模块化项目中引入 3. 使用Axios发送请求3.1 GET请求3.2 POST请求 4. Axios请求方式别名5. 使用Axios创建实例5.1 创建Axios实例5.2 使用实例发送请求 6. 使用async/await简化异步请求6.1 获取所有文章数据6…

windows工具 -- 使用rustdesk和云服务器自建远程桌面服务, 手机, PC, Mac, Linux远程桌面 (简洁明了)
目的
向日葵最先放弃了, todesk某些功能需要收费, 不想用了想要 自己搭建远程桌面 自己使用希望可以电脑 控制手机分辨率高一些
原理理解 ubuntu云服务器配置 够买好自己的云服务器, 安装 Ubuntu操作系统 点击下载 hbbr 和 hbbs 两个 deb文件: https://github.com/rustdesk/…

MySQL-关联查询和子查询
目录
一、笛卡尔积
二、表连接
1、内部连接
1.1 等值连接
1.2 非等值连接
2、外部链接
2.1 左外连接-LEFT JOIN
2.2 右外连接-RIGHT JOIN
2.3 全关联-FULL JOIN/UNION
三、子查询
1、嵌套子查询
2、相关子查询
3、insert和select语句添加数据
4、update和select语…
推荐文章
- 基于JAVAEE的停车场管理系统(论文+PPT+源码
- 模拟嵌入式边缘计算卡设计方案:367-XC7Z100 板卡 基于zynq XC7Z100 FMC接口通用计算平台
- bing许少辉乡村振兴战略下传统村落文化旅游设计images
- ORACLE wallet实现无需输入用户名与密码登陆数据库 注意修改目录权限
- 拼多多:这一刀 砍向了自己
- !vue3中defineEmits接收父组件向子组件传递方法,以及方法所需传的参数及类型定义,避免踩坑!
- #08【面试问题整理】嵌入式软件工程师
- #Day Day Plan# 《NCB_PCI_Express_Base 5.0.1.0》pdf 译文笔记 模版
- #力扣:2236. 判断根结点是否等于子结点之和@FDDLC
- #渗透测试#SRC漏洞挖掘#云技术基础02之容器与云
- #循循渐进学51单片机#1602液晶与串口通信实例#not.12
- (001)UV 的使用以及导出