ROS核心教程
1、文件系统
使用下述命令查看包
rospack = ros + pack(age) 如rospack find roscpp
roscd = ros + cd 如roscd roscpp
rosls = ros + ls 如rosls roscpp
2、ROS节点
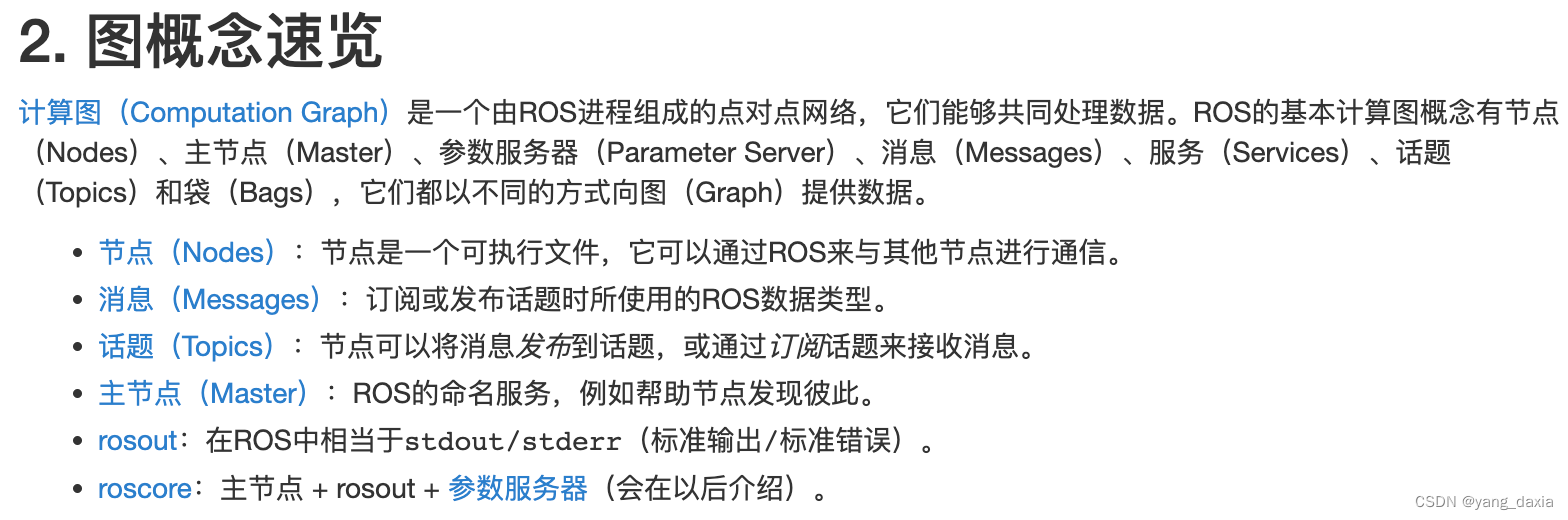
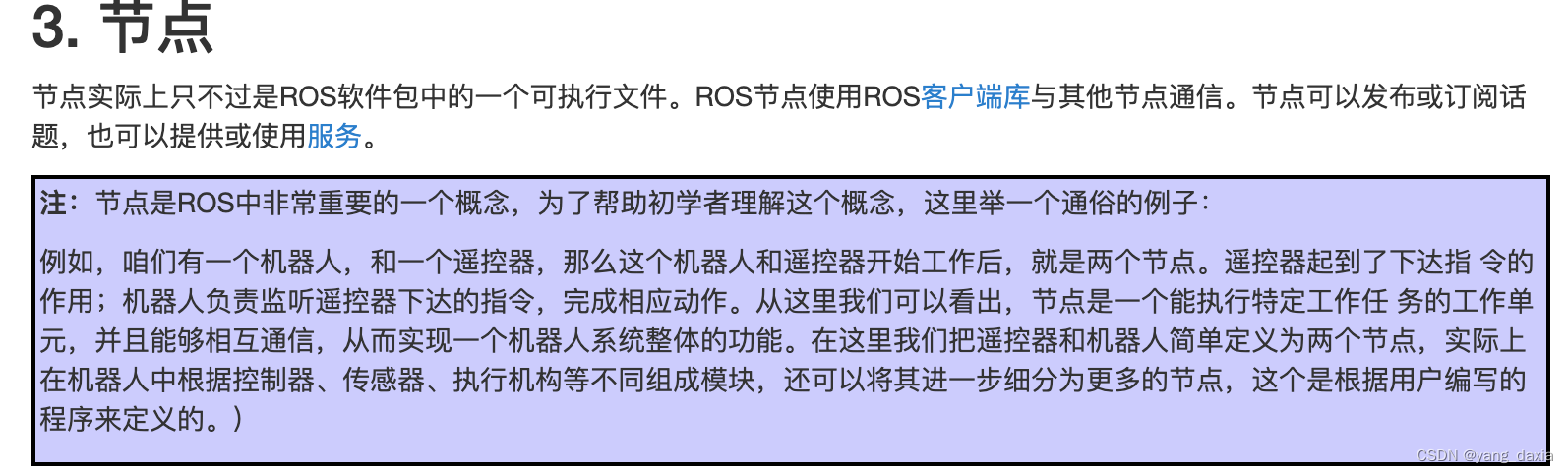
节点可以理解为人工定义一个机器人模块,然后抽象成可执行文件。
rosnode list
rosnode info
3、ROS话题
话题的通信是通过节点间发送ROS消息实现的。为了使节点A和节点B进行通信,两者必须发送和接收相同类型的消息。这意味着话题的类型是由发布在它上面消息的类型决定的。使用rostopic type命令可以查看发布在话题上的消息的类型。
可以理解为数据流?
常用命令:
rostopic echo、rostopic hz、rostopic list
4、启动节点
用来启动定义在launch(启动)文件中的节点。
roslaunch [package] [filename.launch]
5、录制和回放数据
录制所有发布的话题
rosbag record -a
检查并回放bag数据
rosbag info <your bagfile>
rosbag play <your bagfile> , -r 2可以加快回放的速率
参考:http://wiki.ros.org/cn/ROS/Tutorials


![[保研/考研机试] 约瑟夫问题No.2 C++实现](https://img-blog.csdnimg.cn/a6f6e7f24e9244a9993053e684b781f4.png)