文章目录
- 1.ECS服务器挂载NAS文件存储
- 1.1.添加NAS挂载点
- 1.2.为ECS挂载NAS存储
- image-202202012230314501.3.验证ECS服务器是否挂载了NAS存储
- 1.4.卸载挂载的NAS存储
- 2.通过命令行的方式在ECS中挂载NAS存储
- 3.KodCloud云盘系统采用NAS存储用户上传的文件
- 3.1.配置云盘系统接入NAS存储
- 3.2.上传文件查看是否存储在了NAS中
1.ECS服务器挂载NAS文件存储
想要在ECS服务器中挂载NAS存储,需要先增加ECS所在可用区的挂载点,然后配置挂载路径进行挂载即可。
NAS购买完成后,会在NAS使用的交换机的可用区添加一个默认的挂载点,有了这个挂载点之后,可以通过图形化界面将NAS挂载到ECS服务器中。
通图形化界面挂载点的方式为ECS挂载NAS存储只能一台一台的增加,如果想快速为多个ECS挂载NAS,就需要使用命令的方式批量执行,文档地址:https://help.aliyun.com/document_detail/268208.htm
1.1.添加NAS挂载点
1)点击实例的管理按钮

2)添加挂载点
点击挂载使用—>添加挂载点。

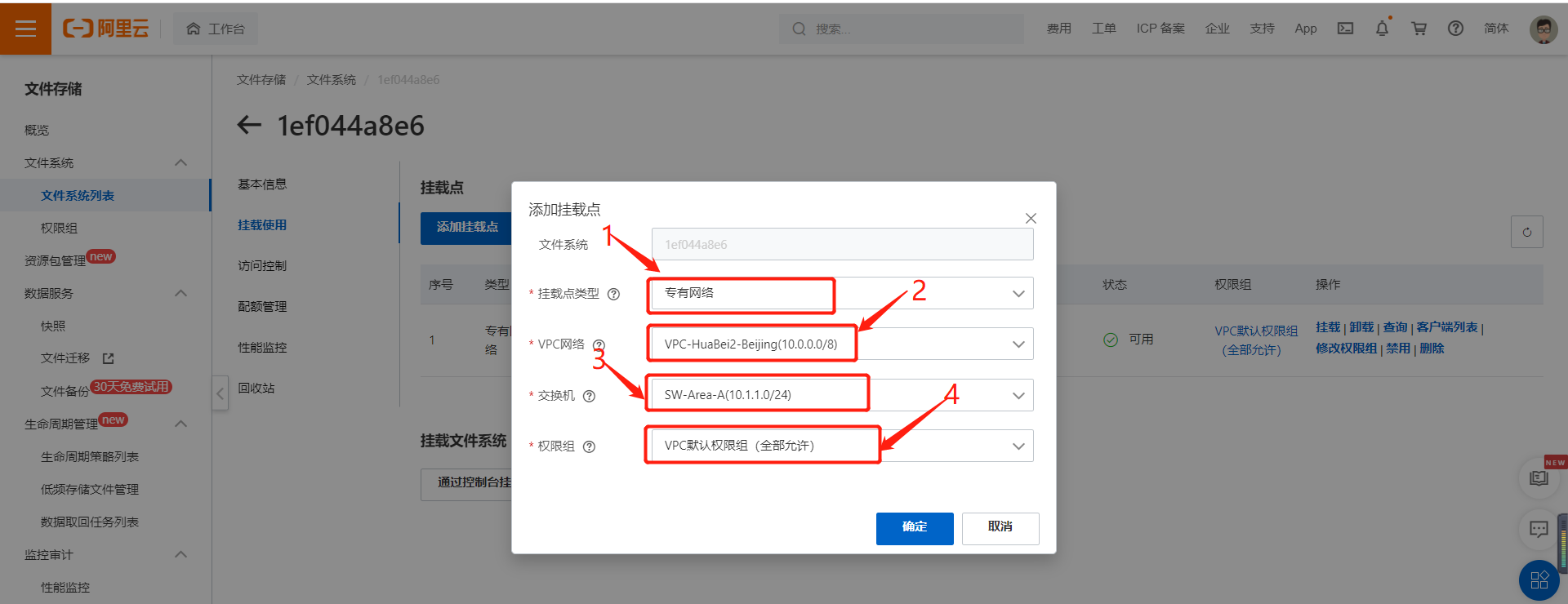
3)配置挂载点信息
挂载点类型选择专有网络—>VPC网络选择所在地域的VPC—>交换机选择ECS所在可用区的交换机—>全选组选择默认的即可。
1.2.为ECS挂载NAS存储
通过配置挂载,将NAS挂载到某一台ECS服务器中。
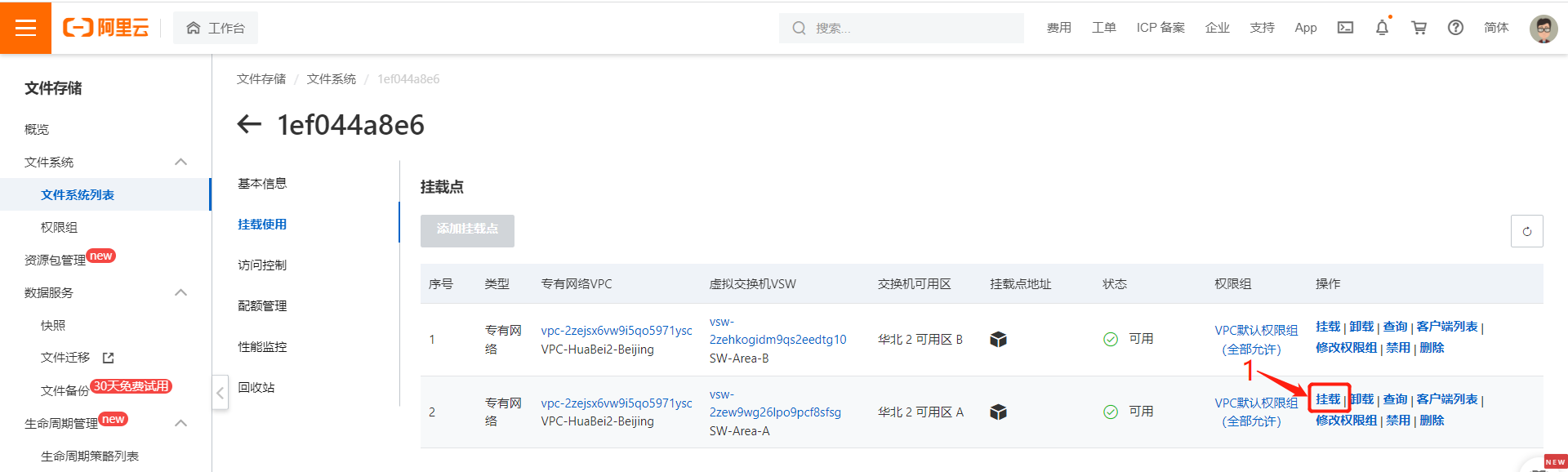
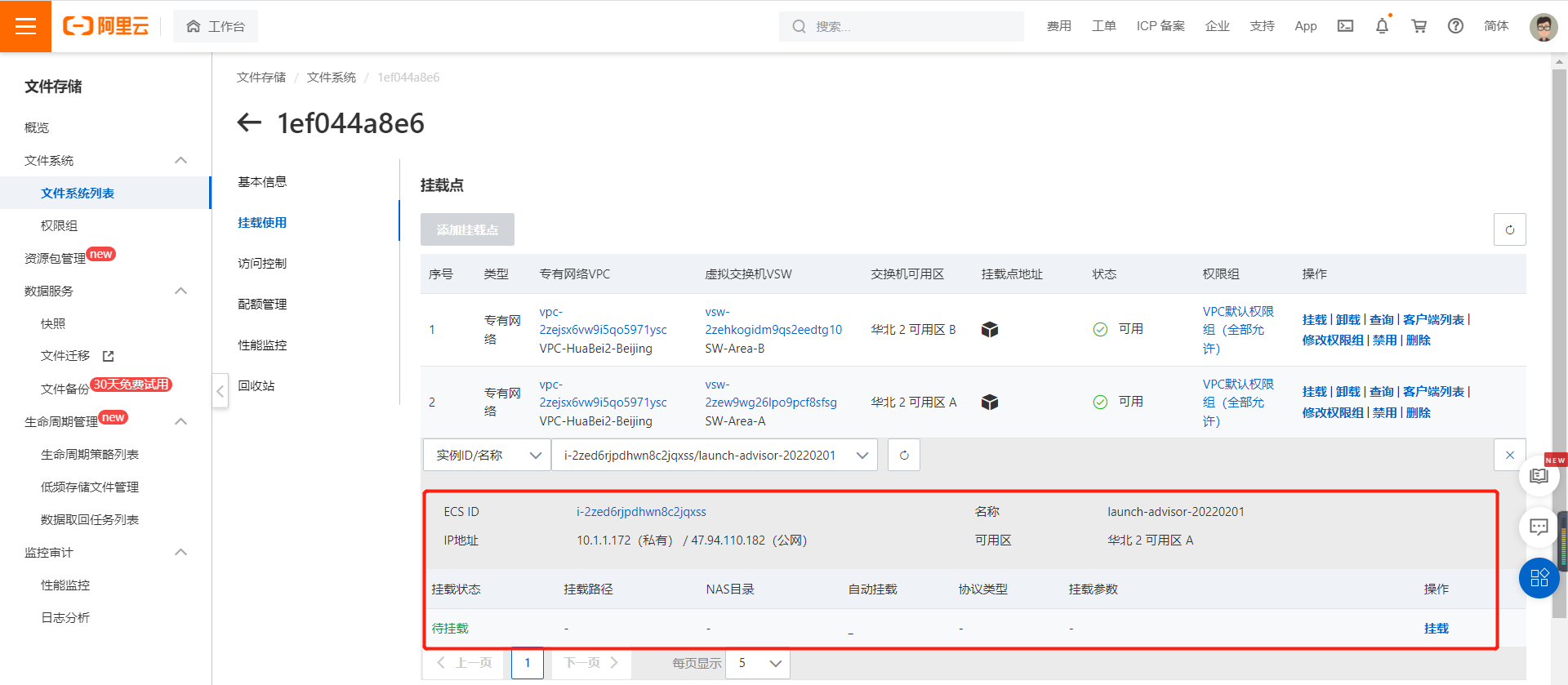
1)点击挂载按钮
找到新添加的挂载点—>点击挂载。
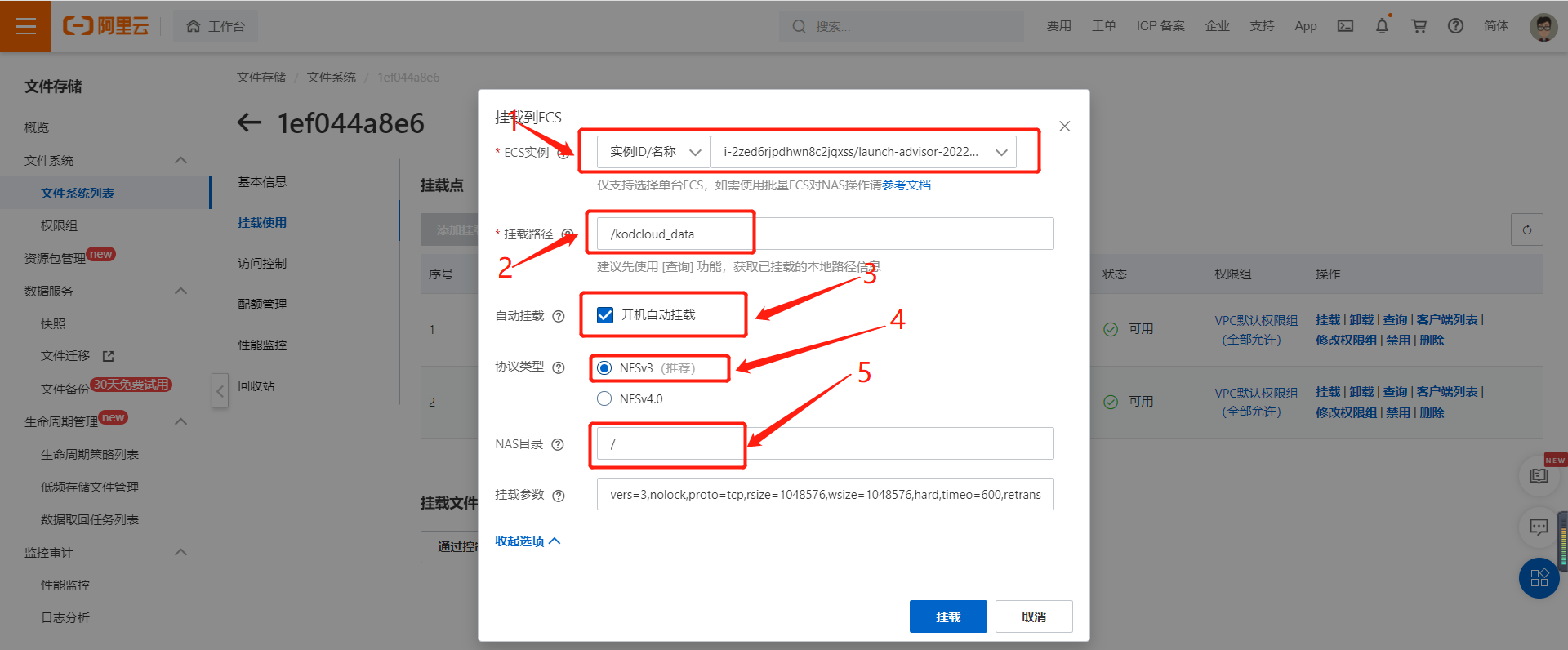
2)配置挂载路径以及要挂载的ECS
在ECS实例中搜索要挂载的ECS服务器—>填写要挂载的路径—>开启开机自动挂载—>协议类型选择NFSv3—>NAS目录为/—>挂载参数默认即可—>点击挂载。
3)开始挂载
点击完挂载后会自动开启挂载,如下图所示,会显示要挂载的ECS服务器信息以及挂载的路径。
 1.3.验证ECS服务器是否挂载了NAS存储
1.3.验证ECS服务器是否挂载了NAS存储
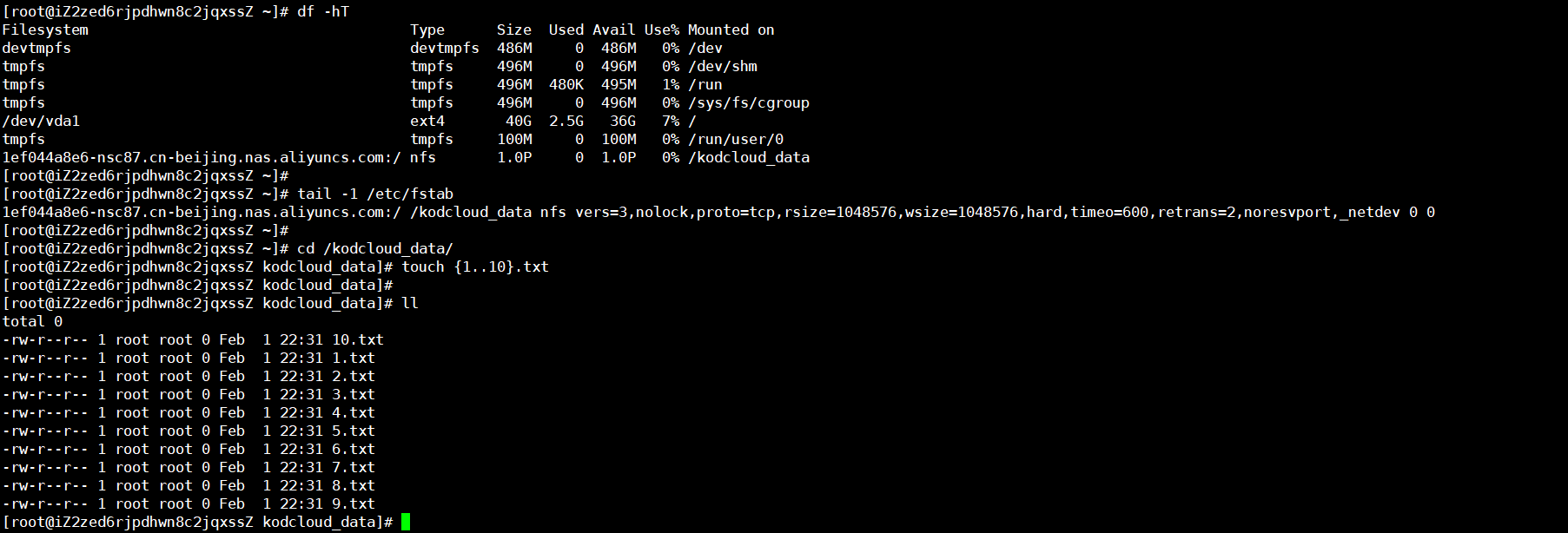
[root@iZ2zed6rjpdhwn8c2jqxssZ ~]# df -hT
Filesystem Type Size Used Avail Use% Mounted on
devtmpfs devtmpfs 486M 0 486M 0% /dev
tmpfs tmpfs 496M 0 496M 0% /dev/shm
tmpfs tmpfs 496M 480K 495M 1% /run
tmpfs tmpfs 496M 0 496M 0% /sys/fs/cgroup
/dev/vda1 ext4 40G 2.5G 36G 7% /
tmpfs tmpfs 100M 0 100M 0% /run/user/0
1ef044a8e6-nsc87.cn-beijing.nas.aliyuncs.com:/ nfs 1.0P 0 1.0P 0% /kodcloud_data
#成功的挂载到了/kodcloud_data目录[root@iZ2zed6rjpdhwn8c2jqxssZ ~]# tail -1 /etc/fstab
1ef044a8e6-nsc87.cn-beijing.nas.aliyuncs.com:/ /kodcloud_data nfs vers=3,nolock,proto=tcp,rsize=1048576,wsize=1048576,hard,timeo=600,retrans=2,noresvport,_netdev 0 0
#已经向/etc/fstab文件中写入了开机自动挂载配置[root@iZ2zed6rjpdhwn8c2jqxssZ ~]# cd /kodcloud_data/
[root@iZ2zed6rjpdhwn8c2jqxssZ kodcloud_data]# touch {1..10}.txt
#在存储中写入文件也没有任何问题
1.4.卸载挂载的NAS存储
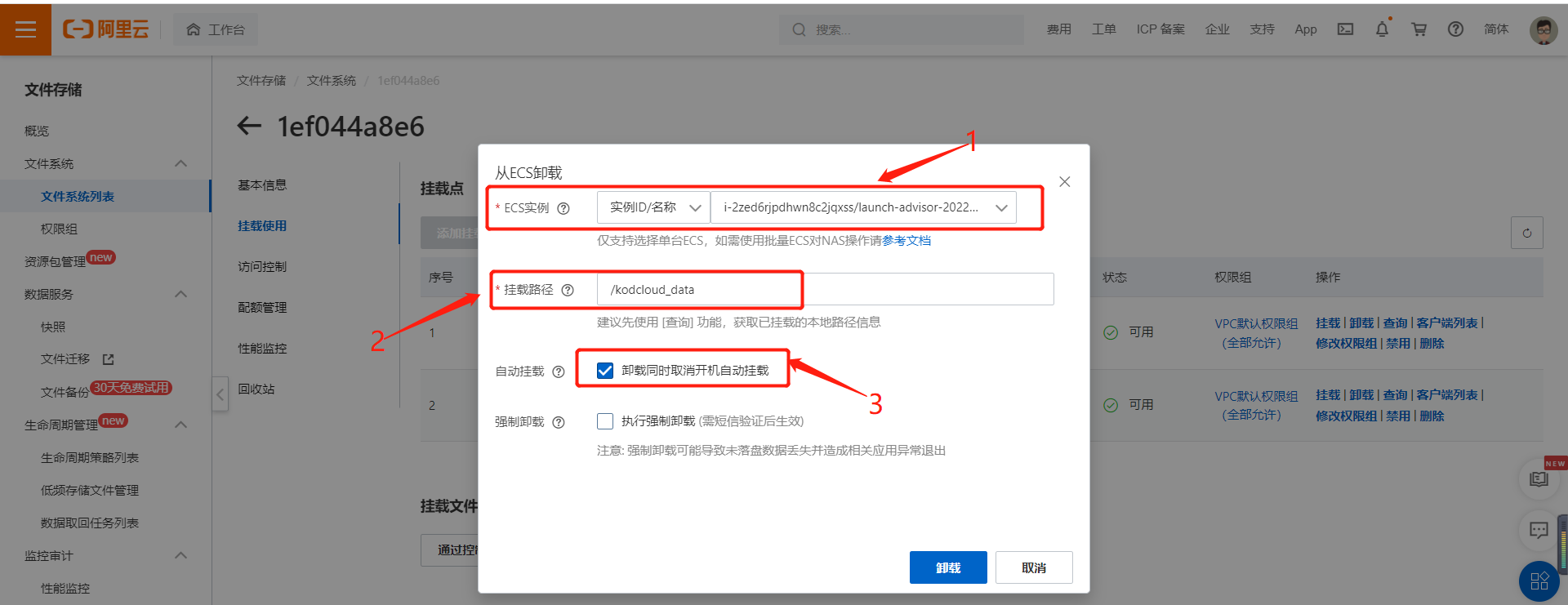
1)点击图中的卸载按钮

2)配置卸载信息
选择要卸载哪一个ECS的NAS存储,然后填写NAS存储挂载的路径,勾选上卸载同时取消开机自动挂载,最后点击卸载。
3)卸载完成
点击完卸载后,只要目录没有在使用,过一小会就可以完成卸载。
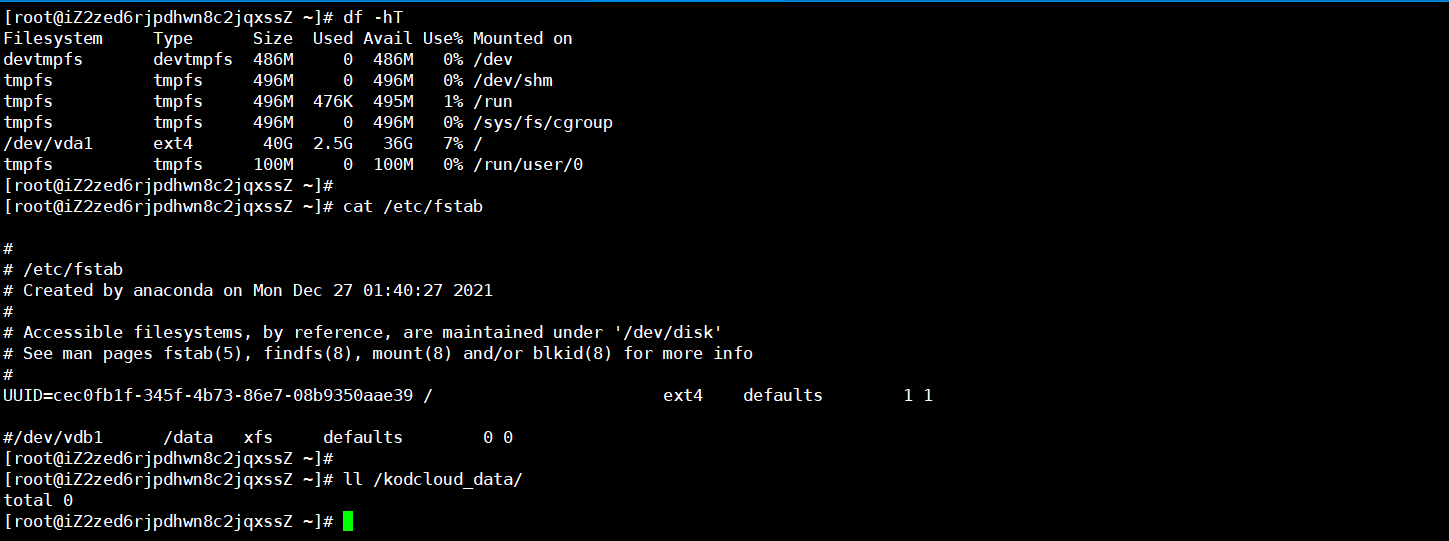
4)验证ECS服务器中是否已经卸载NAS存储
使用df命令可以看到挂载点已经取消,并且开机自启文件中也没有了挂载配置,并且源路径中刚刚创建的文件也一并释放。
2.通过命令行的方式在ECS中挂载NAS存储
1)在挂载使用的下方有一个通过命令行挂载到ECS,点击按钮,就可以看到挂载的命令。

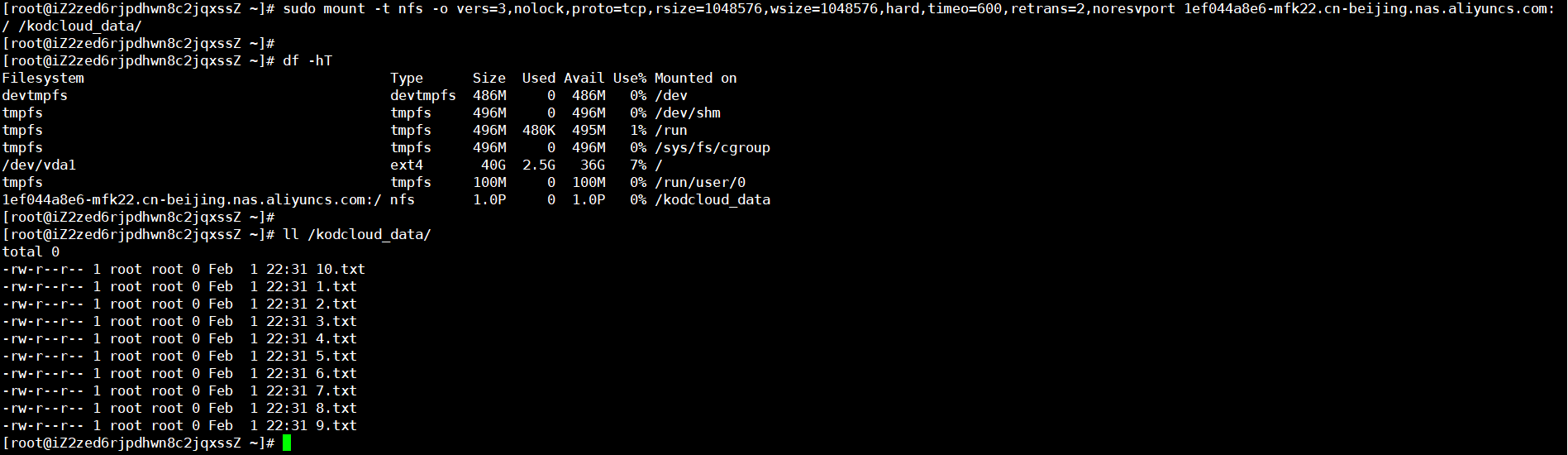
2)在ECS中执行挂载命令,注意修改挂载路径。
[root@iZ2zed6rjpdhwn8c2jqxssZ ~]# sudo mount -t nfs -o vers=3,nolock,proto=tcp,rsize=1048576,wsize=1048576,hard,timeo=600,retrans=2,noresvport 1ef044a8e6-mfk22.cn-beijing.nas.aliyuncs.com:/ /kodcloud_data/[root@iZ2zed6rjpdhwn8c2jqxssZ ~]# df -hT
Filesystem Type Size Used Avail Use% Mounted on
devtmpfs devtmpfs 486M 0 486M 0% /dev
tmpfs tmpfs 496M 0 496M 0% /dev/shm
tmpfs tmpfs 496M 480K 495M 1% /run
tmpfs tmpfs 496M 0 496M 0% /sys/fs/cgroup
/dev/vda1 ext4 40G 2.5G 36G 7% /
tmpfs tmpfs 100M 0 100M 0% /run/user/0
1ef044a8e6-mfk22.cn-beijing.nas.aliyuncs.com:/ nfs 1.0P 0 1.0P 0% /kodcloud_data[root@iZ2zed6rjpdhwn8c2jqxssZ ~]# ll /kodcloud_data/
3.KodCloud云盘系统采用NAS存储用户上传的文件
3.1.配置云盘系统接入NAS存储
1)点击头像—>后台管理。

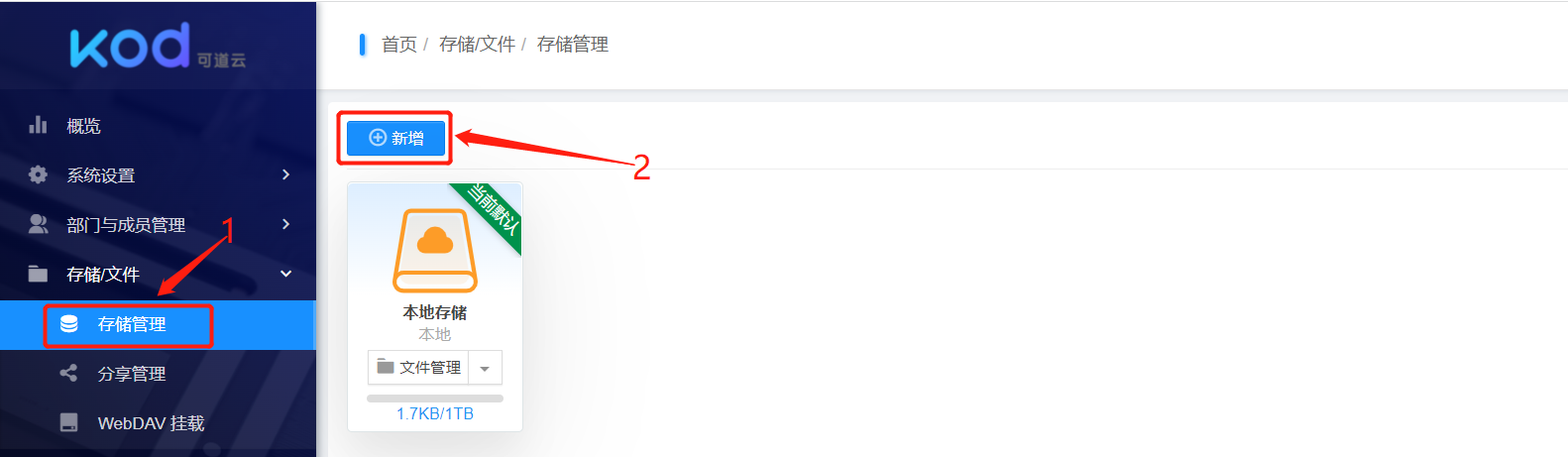
2)点击存储管理—>点击新增。
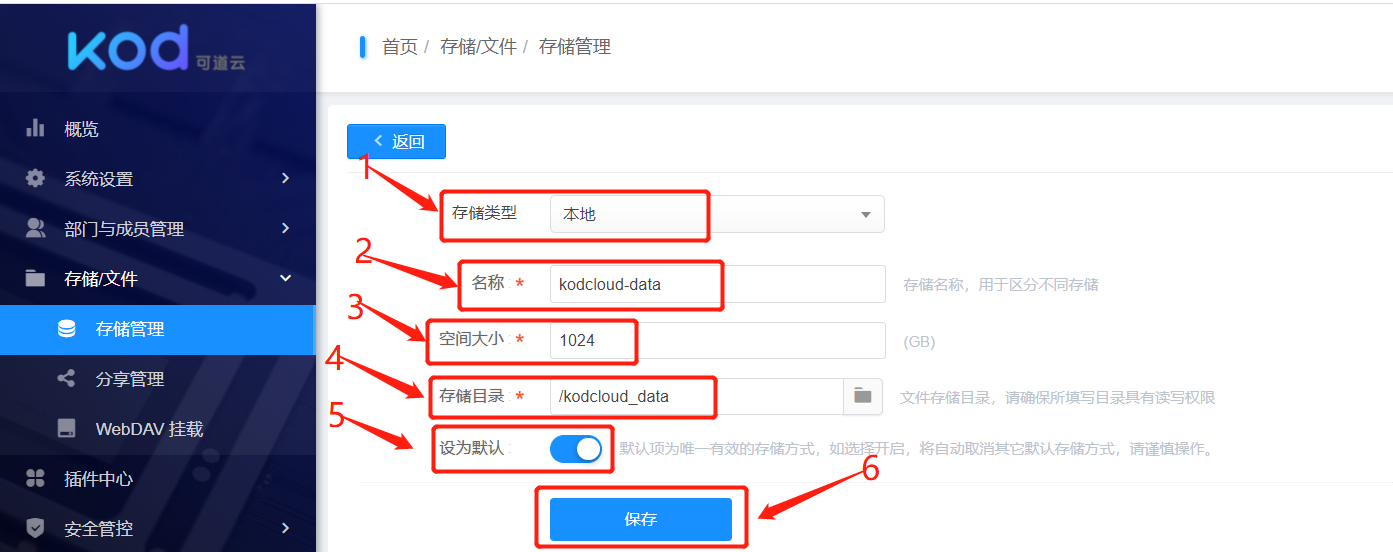
3)存储类型为本地—>名称填写为kodcloud-data—>空间大小任意填写—>存储目录为/kodcloud_data—>勾选上默认—>点击保存。
3.2.上传文件查看是否存储在了NAS中
1)在云盘中上传一些文件。

2)查看NAS中存储的云盘文件,云盘系统会在指定的存储路径创建一个以年月命名的目录在下面会再生成一个目录,在这个目录中可以看到上传的文件。