在七月算法报的班,老师讲的蛮好。好记性不如烂笔头,关键内容还是记录一下吧,课程入口,感兴趣的同学可以学习一下。
-------------------------------------------------------------------------------------------------------------------------------
特征点法流程:
1.在图像中提取特征点并计算特征描述 非常耗时约10ms ORB
2.在不同图像中寻找特征匹配 非常耗时𝑂(𝑛∧2) 暴力匹配
3.利用匹配点信息计算相机位姿 比较快速<1ms
是否可以不使用特征匹配计算VO?
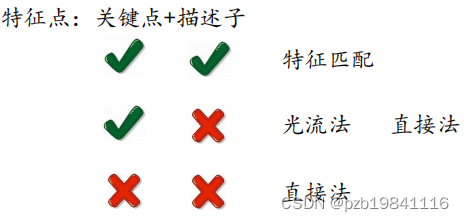
光流法:最小化重投影误差 Reprojection error
直接法:最小化光度误差 Photometric error
光流: 追踪源图像某个点在其他图像中的运动。本质→估计像素在不同时刻图像中的运动。
光流法又分为两大类,每一类的计算方法也不同。
❑ 稀疏光流:计算部分像素运动 ---- Lucas Kanade
❑ 稠密光流:计算全部像素运动 ---- Horn Schunck

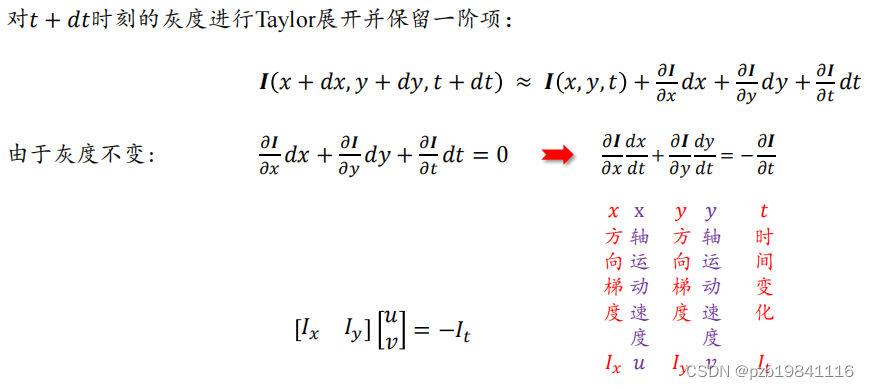
光流法的前提假说:灰度不变。

光流法的数学基础
光流法中的L-K方法

LK光流的结果依赖于图像梯度
❑ 但梯度不够平滑,可能剧烈变化
❑ 局部的梯度不能用于预测长期图像走向
解决方式:多层光流

光流法的总结:
➢ 可以看成最小化像素误差的非线性优化
➢ 每次使用了 Taylor 一阶近似,在离优化点较远时效果不佳,往往需要迭代多次
➢ 运动较大时要使用金字塔
➢ 可以用于跟踪图像中的稀疏关键点的运动轨迹
➢ 得到配对点后,后续计算与特征法VO中相同
光流法的缺点:
➢ 没有用到相机本身的几何结构
➢ 没有考虑到相机的旋转和图像的缩放
➢ 对于边界上的点,光流不好追踪
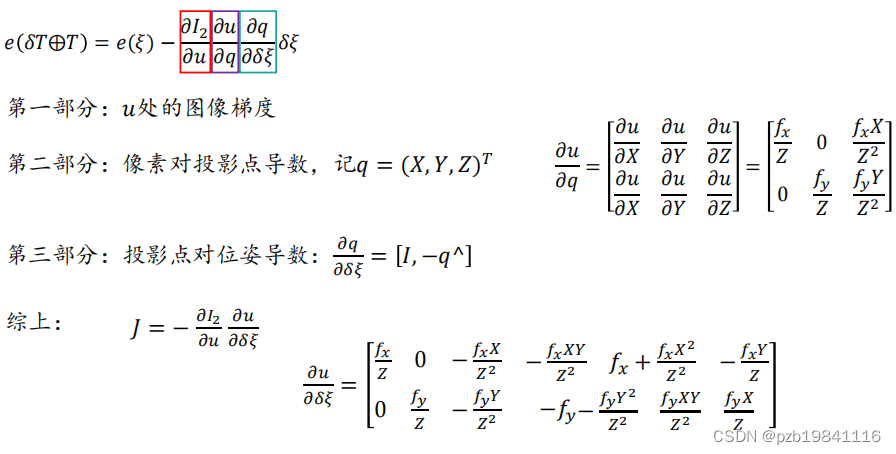
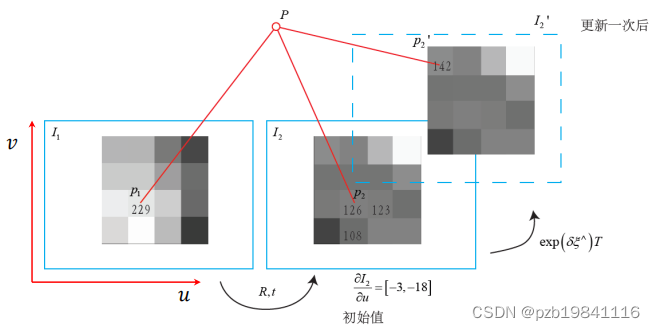
直接法:
通过相机模型对相机位姿变化进行估计


建立目标函数

计算过程

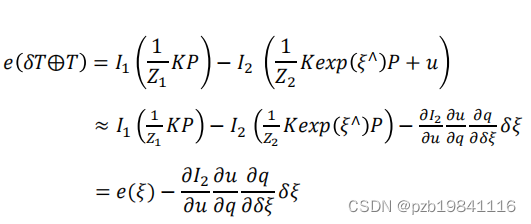
左扰动分解中三项的物理意义
根据使用的图像信息不同,可分为:
➢ 稀疏直接法:只处理稀疏角点或关键点
➢ 稠密直接法:使用所有像素
➢ 半稠密直接法:使用部分梯度明显的像素
直接法的直观解释:
➢ 像素灰度引导着优化的方向
➢ 要使优化成立,必须保证从初始估计到最优估计中间的梯度一直下降
➢ 这很容易受到图像非凸性的影响
直接法的优势与劣势
优势:
❑ 省略特征提取的时间
❑ 只需有像素梯度而不必是角点(对白墙等地方有较好效果)
❑ 可稠密或半稠密
劣势:
❑ 灰度不变难以满足(易受曝光和模糊影响)
❑ 单像素区分性差
❑ 图像非凸性