目录
一、实现和完整UI视频效果展示
主界面:
识别结果界面:
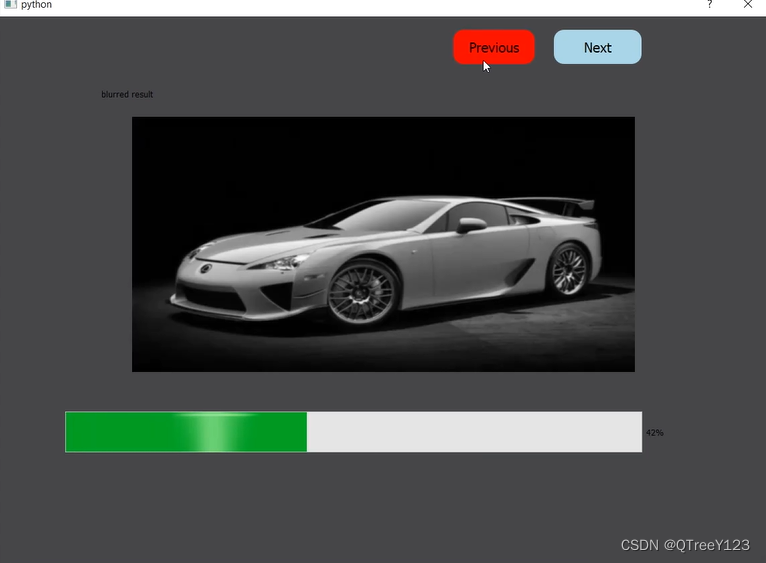
查看分割处理过程图片界面:
二、原理介绍:
加权灰度化
编辑
二值化
滤波降噪处理
锐化处理
边缘特征提取
图像分割
完整演示视频:
完整代码链接
一、实现和完整UI视频效果展示
主界面:

识别结果界面:
查看分割处理过程图片界面:
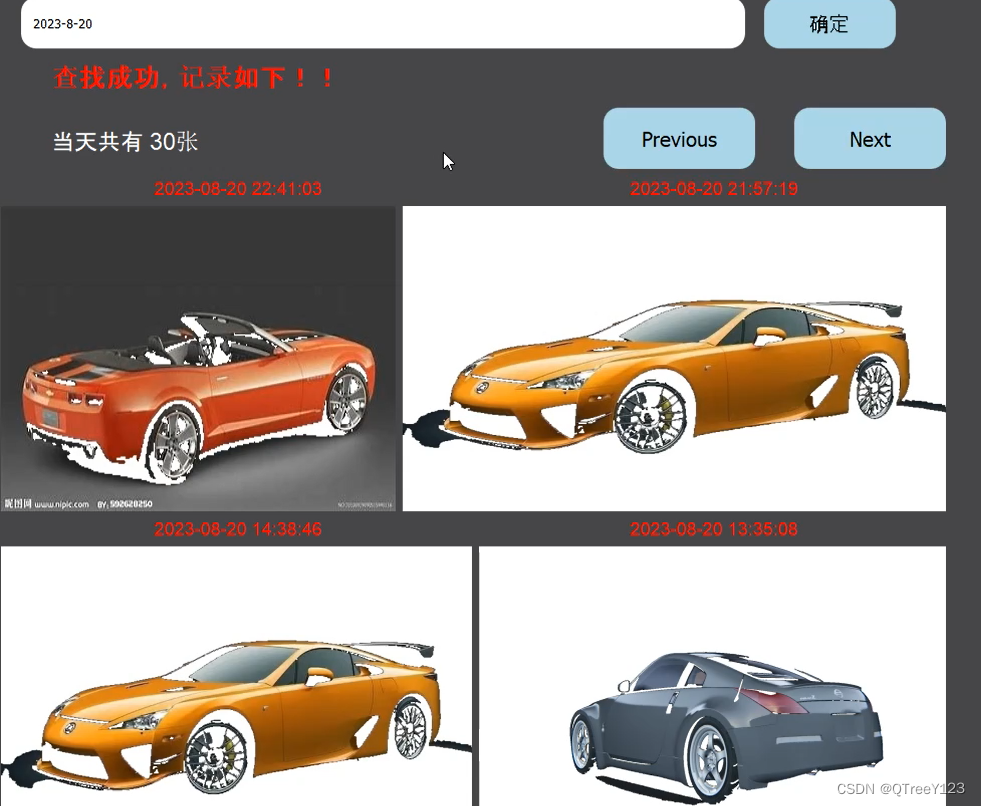
历史记录
二、原理介绍:
加权灰度化
图像灰度化的目的是为了简化矩阵,提高运算速度。彩色图片的信息含量过大,而进行图片识别时,其实只需要使用灰度图像里的信息就足够了,所以图像灰度化的目的就是为了提高运算速度
# 创建一个与图像大小相同的灰度图像数组weight_gray = np.zeros(image.shape[0:2], dtype='uint8')# 使用加权平均法将彩色图像转换为灰度图像for ii in range(image.shape[0]):for jj in range(image.shape[1]):r, g, b = image[ii, jj, :]weight_gray[ii, jj] = 0.3 * r + 0.59 * g + 0.11 * b
二值化
将图像的像素点和灰度值设置为0或255,将图像呈现出黑白的效果,图像二值化可以使图像中的数据量大大减少,从而凸显出目标的轮廓,也同时方便提取图像中的信息,增加识别的效率
# 对灰度图像进行二值化处理
T = 30
for y in range(image.shape[1]):for x in range(image.shape[0]):if weight_gray[x][y] < T:weight_gray[x][y] = 0else:weight_gray[x][y] = 255![]()
![]()
滤波降噪处理
图像滤波的目的有两个:一是抽出对象的特征作为图像识别的特征模式;另一个是为适应图像处理的要求,消除图像数字化时所混入的噪声。调高提高图像的信噪比,使图像的应用特征突出。采用最小值滤波对图像进行降噪处理
# 对二值化图像进行滤波降噪
n = 3
salt_weight_gray = util.random_noise(weight_gray, mode='salt', rng=None, clip=True)
min_weight_gray = ndimage.minimum_filter(salt_weight_gray, (n, n))![]()

![]()
锐化处理
锐化处理的目的是增强图像中目标的细节、边缘、轮廓和其他灰度突变,削弱了灰度变化缓慢的区域。对图像使用拉普拉斯算子进行空间滤波得到拉普拉斯图像,将拉普拉斯图像以一定比例叠加到原始图像,可对原始图像进行拉普拉斯锐化增强,更加突出图像的纹理结构
# 对灰度图像进行锐化处理
img_laplace = filters.laplace(weight_gray, ksize=3, mask=None)
img_enhance = weight_gray + img_laplace![]()
![]()
边缘特征提取
采用LoG边缘检测算子:首先利用二维高斯函数对图像进行低通滤波(先平滑掉噪声),再用Laplace算子进行二阶导数运算进行边缘检测。目的就是找到图像中亮度变化剧烈的像素点构成的集合,表现出来往往是轮廓
# 对灰度图像进行高斯平滑和LoG边缘检测
gaussian_weight_gray = gaussian(weight_gray)
edge_LoG = laplace(gaussian_weight_gray)![]()

![]()

![]()
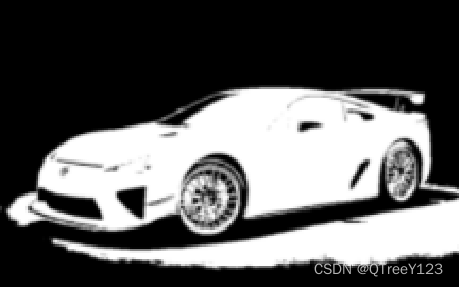
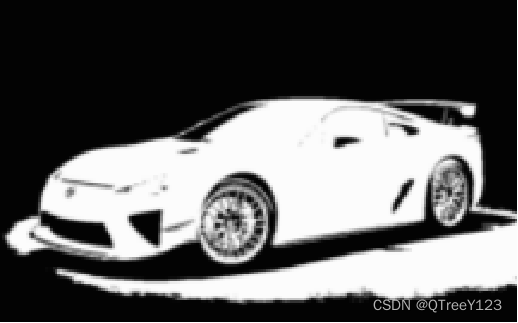
图像分割
对灰度车辆图像进行了闻值处理,得到二值化车辆图像。然后对二值化车辆图像进行了标记,获取到车辆的连通区域,并计算了它们的面积。在所有连通区域中选取面积最大的,创建一个与二值化车辆图像相同大小的遮罩数组,将面积等于largest area 的连通区域像素置为 1,其余部分为0,最后复制原始图
# 分割汽车图像
threshold = filters.threshold_otsu(gaussian_weight_gray)
car_binary = gaussian_weight_gray > threshold
car_labels = measure.label(car_binary)
properties = measure.regionprops(car_labels)
areas = [prop.area for prop in properties]
![]()

完整演示视频:
无法粘贴视频........
完整代码链接
视频和代码都已上传百度网盘,放在主页置顶文章