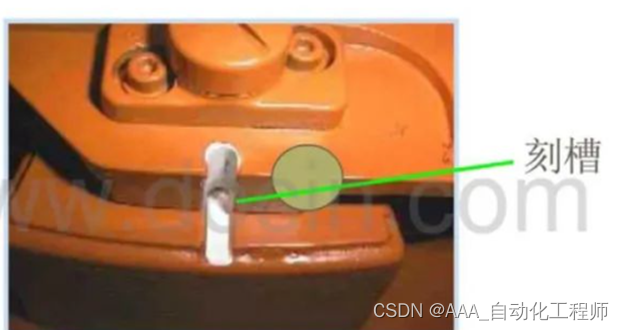
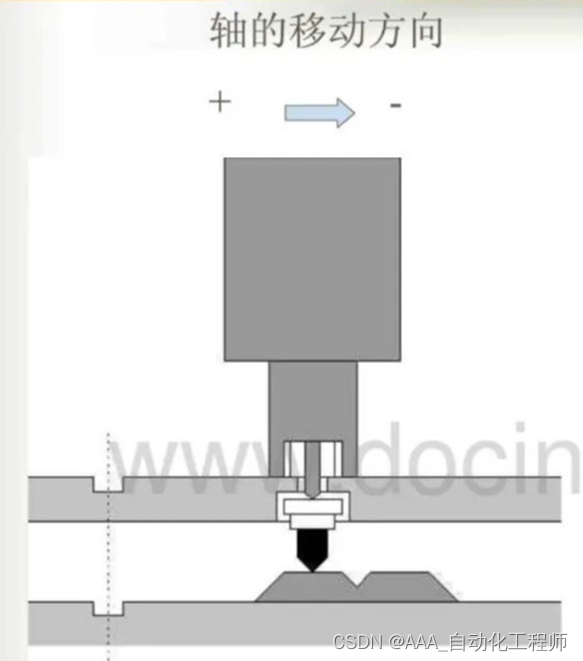
KUKA机器人零点标定的具体方法



本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/107610.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
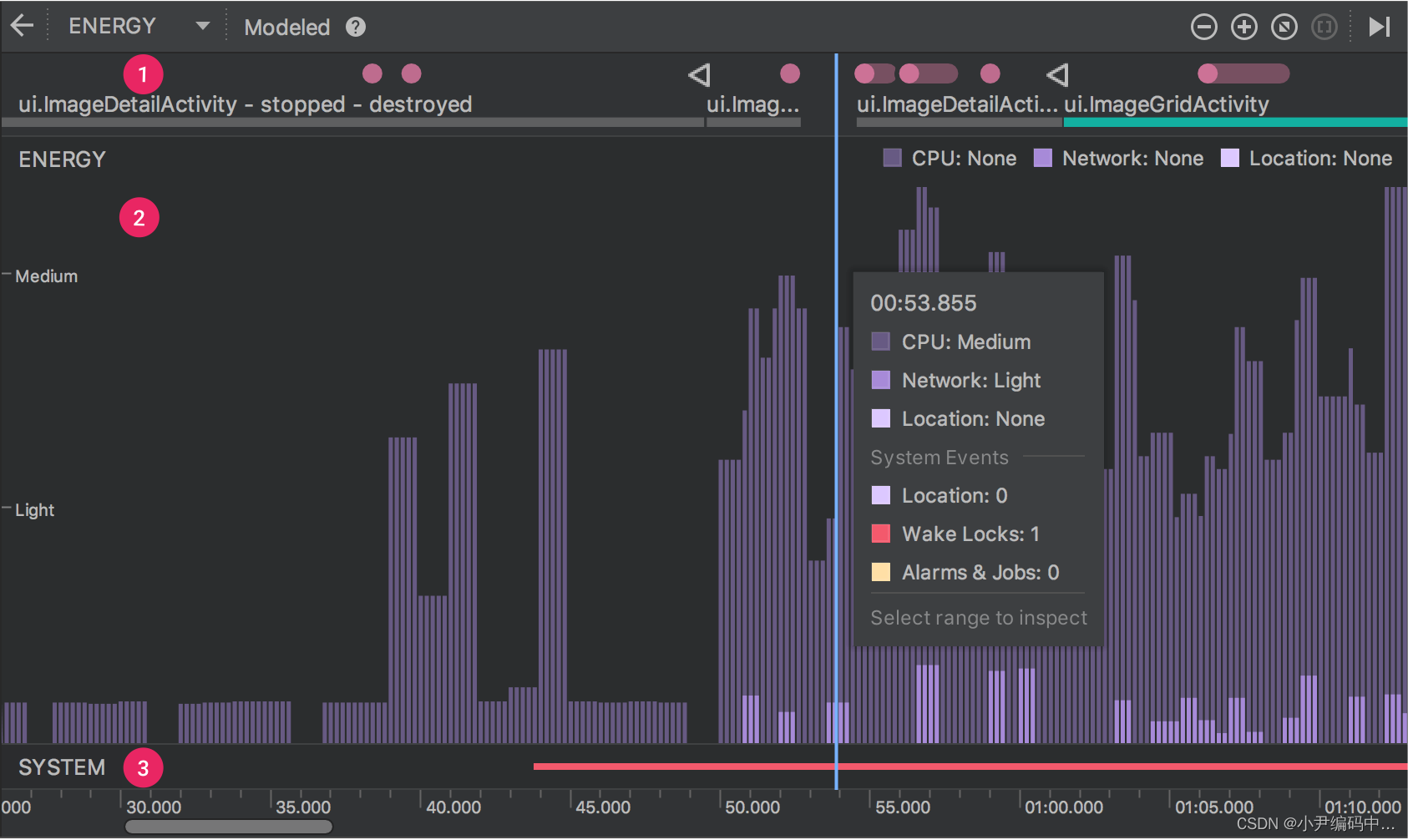
Android开发之性能测试工具Profiler
前言 性能优化问题,在我们开发时都会遇到,但是在小厂和对自己要求不严格的情况下,我都很少去做性能优化; 在性能优化上,基本大家都是通过自己的开发经验和性能分析工具来发现问题,今天给大家分享一下小编最…

安装启动yolo5教程
目录
一、下载yolo5项目
二、安装miniconda(建议不要安装在C盘)
三、安装CUDA
四、安装pytorch
五、修改配置参数
六、修改电脑参数
七、启动项目 博主硬件:
Windows 10 家庭中文版 一、下载yolo5项目
GitHub - ultralytics/yolov5:…
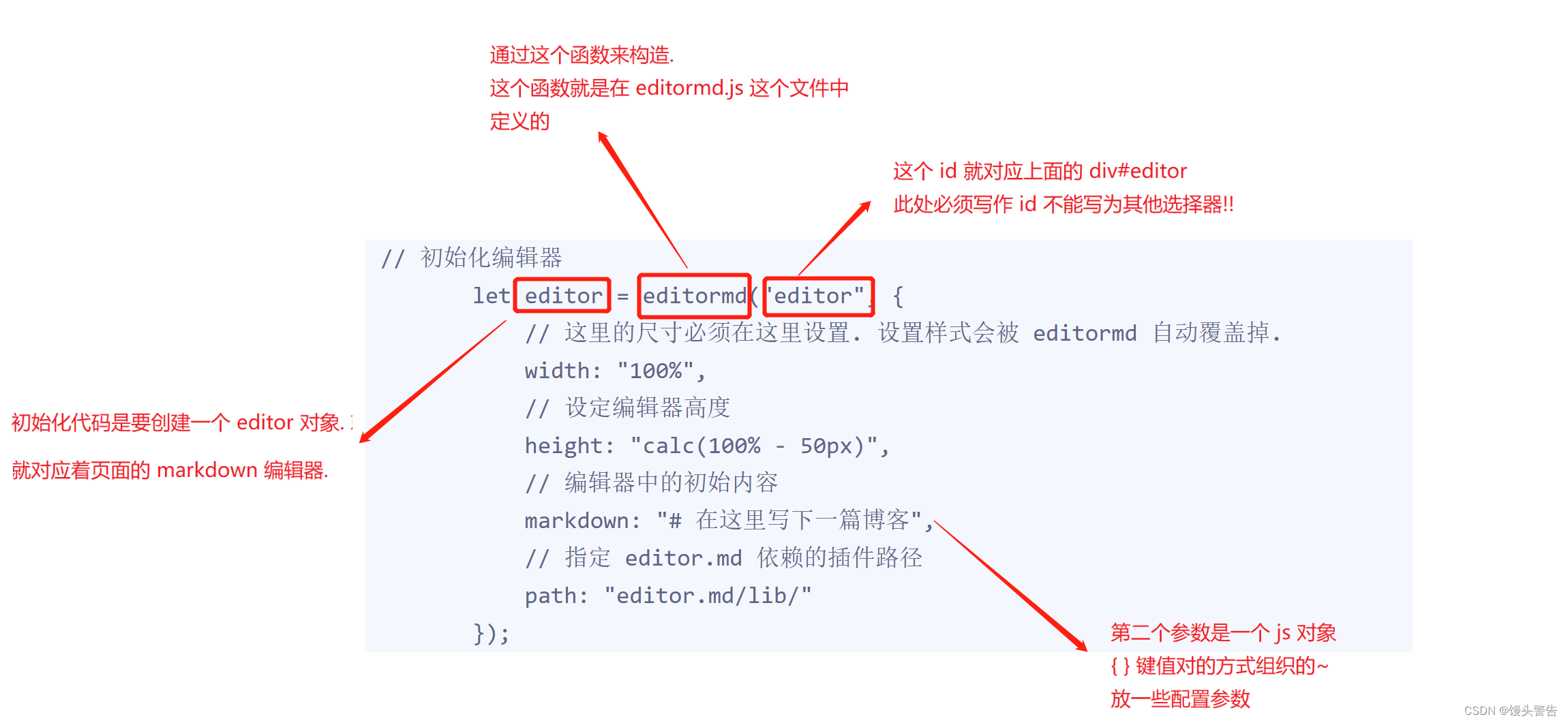
博客系统——前端部分
目录
一、博客页面介绍
二、实现博客列表页
1、先实现导航栏
2、页面主体
左侧区域的实现:编辑
右侧页面的实现:编辑
博客列表页代码汇总:
三、实现博客详情页 代码实现:
四、实现博客登录页编辑
五、博客编辑页 …
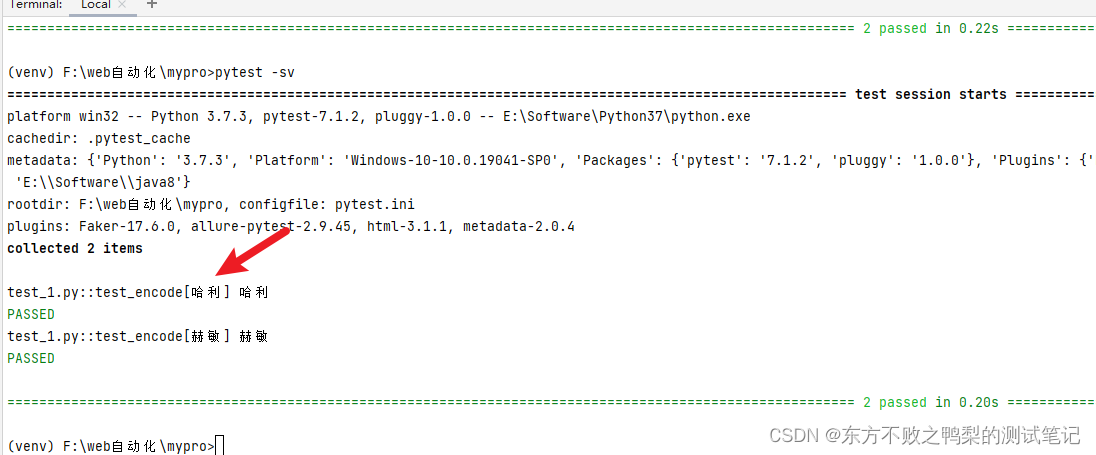
测试框架pytest教程(6)钩子函数hook开发pytest插件
pytest hook 函数也叫钩子函数,pytest 提供了大量的钩子函数,可以在用例的不同生命周期自动调用。 比如,在测试用例收集阶段,可利用 hook 函数修改测试用例名称的编码。
pytest的hook是基于Python的插件系统实现的,使…

2023-08-25 LeetCode每日一题(统计二叉树中好节点的数目)
2023-08-25每日一题
一、题目编号
1448. 统计二叉树中好节点的数目二、题目链接
点击跳转到题目位置
三、题目描述
给你一棵根为 root 的二叉树,请你返回二叉树中好节点的数目。
「好节点」X 定义为:从根到该节点 X 所经过的节点中,没有…
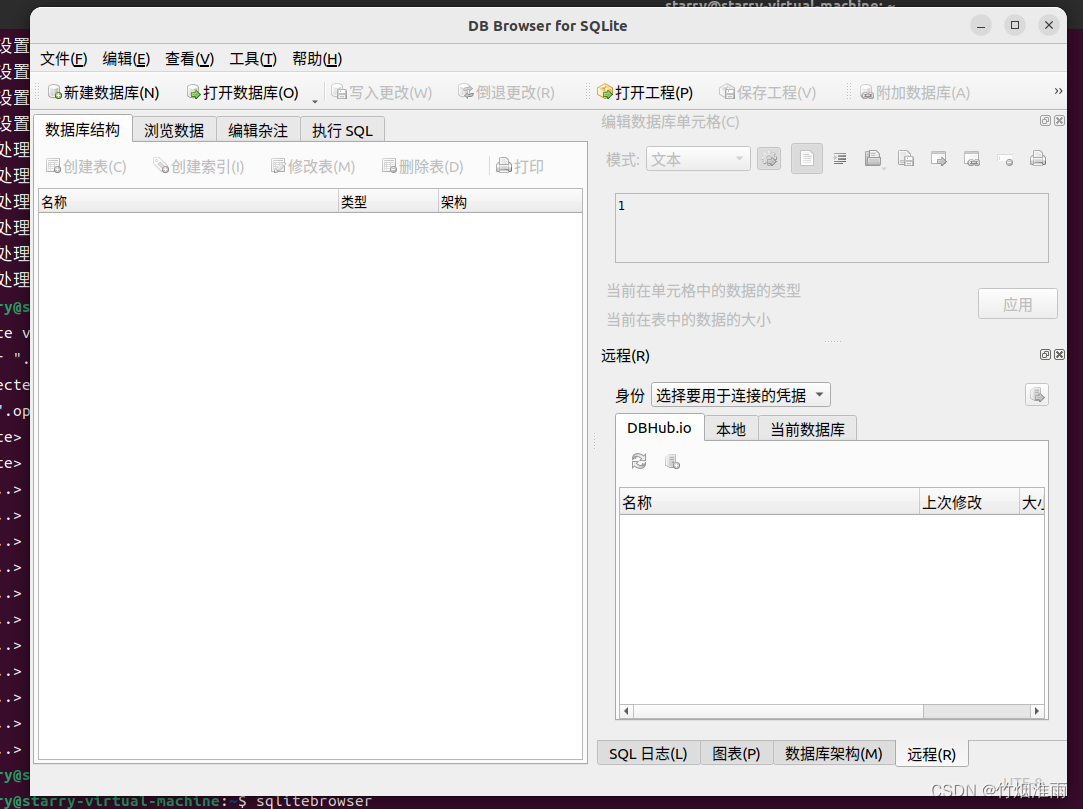
02.sqlite3学习——嵌入式数据库的基本要求和SQLite3的安装
目录
嵌入式数据库的基本要求和SQLite3的安装
嵌入式数据库的基本要求
常见嵌入式数据库
sqlite3简介
SQLite3编程接口模型
ubuntu 22.04下的SQLite安装 嵌入式数据库的基本要求和SQLite3的安装
嵌入式数据库的基本要求 常见嵌入式数据库 sqlite3简介 SQLite3编程接口模…
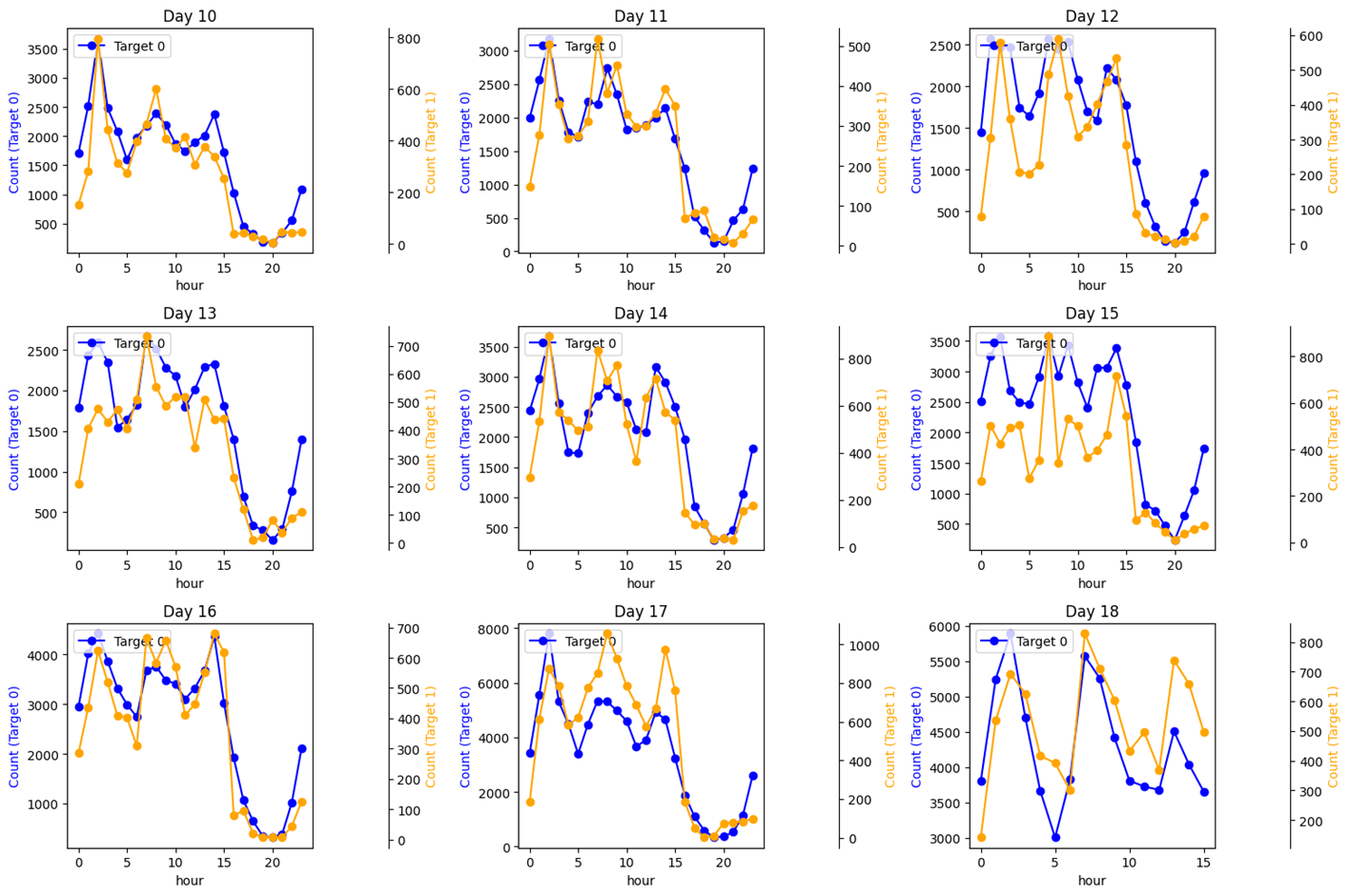
DataWhale 机器学习夏令营第三期——任务二:可视化分析
DataWhale 机器学习夏令营第三期 学习记录二 (2023.08.23)——可视化分析1.赛题理解2. 数据可视化分析2.1 用户维度特征分布分析2.2 时间特征分布分析 DataWhale 机器学习夏令营第三期 ——用户新增预测挑战赛 学习记录二 (2023.08.23)——可视化分析
2023.08.17 已跑通baseli…
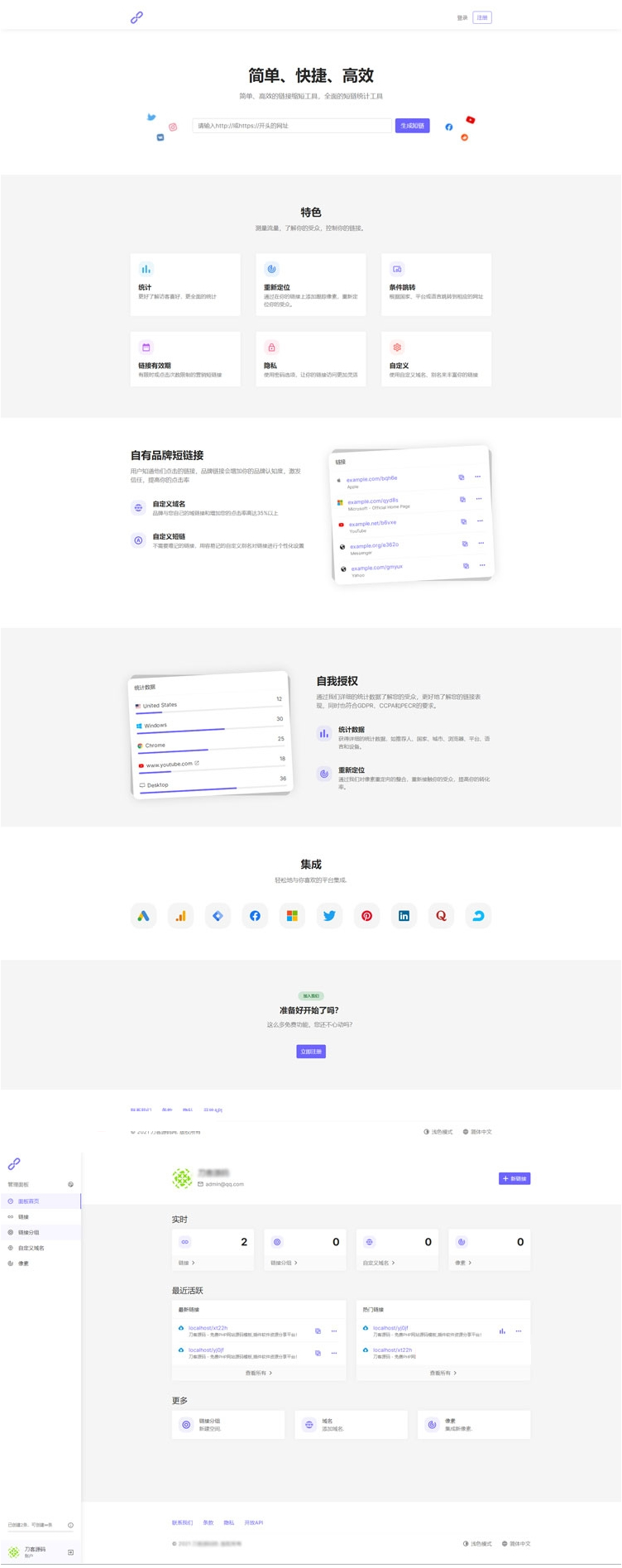
最新PHP短网址生成系统/短链接生成系统/URL缩短器系统源码
全新PHP短网址系统URL缩短器平台,它使您可以轻松地缩短链接,根据受众群体的位置或平台来定位受众,并为缩短的链接提供分析见解。
系统使用了Laravel框架编写,前后台双语言使用,可以设置多域名,还可以开设套…

2023国赛数学建模思路 - 案例:退火算法
文章目录 1 退火算法原理1.1 物理背景1.2 背后的数学模型 2 退火算法实现2.1 算法流程2.2算法实现 建模资料 ## 0 赛题思路
(赛题出来以后第一时间在CSDN分享)
https://blog.csdn.net/dc_sinor?typeblog
1 退火算法原理
1.1 物理背景
在热力学上&a…

力与美的交响丨远航Y6全国媒体试驾会成都举办,实力演绎中式豪华+极致性能
8月24日,四川成都,远航Y6全国媒体试驾会圆满举办。来自全国的近百家媒体亲身试乘试驾,深度感受远航Y6诠释的高端豪华新体验。 绵绵细雨难掩相聚的热情。远航汽车自去年成都车展正式发布亮相,就与成都结下了不解之缘。历经一年的持…
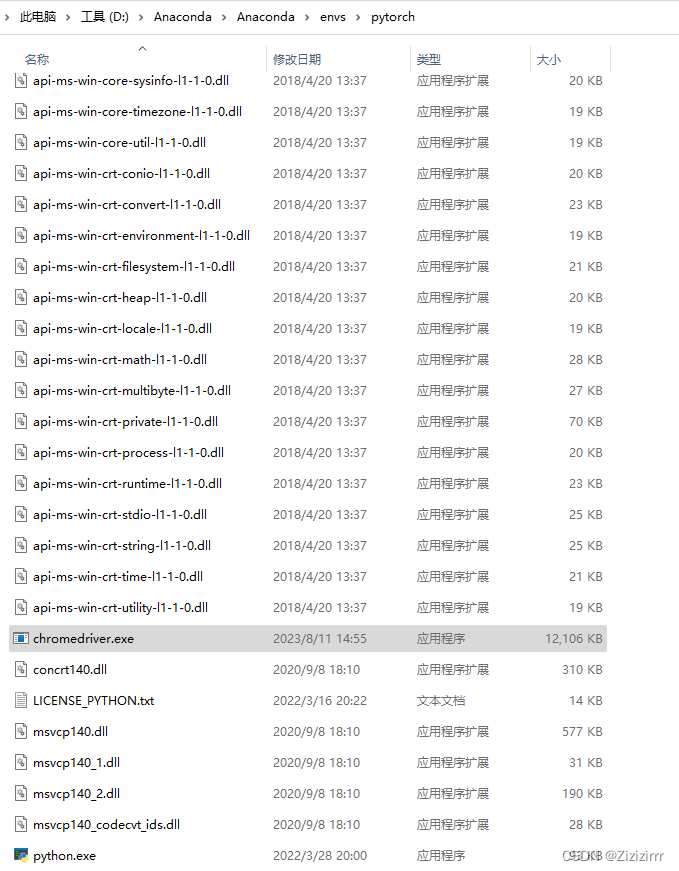
关于chromedriver.exe一系列问题的解决办法
最新 chromedriver.exe下载地址:https://googlechromelabs.github.io/chrome-for-testing/#stable
下载最新版本的 chromedriver.exe 将其解压在 python.exe 同目录下,以及Chrome 的路径下
例如: C:\Program Files\Google\Chrome\Applicati…

算法通关村第十一关——搞清位运算
源码、反码和补码
很多人都记不清源码、反码和补码的区分,都是二进制,其实记忆起来很简单,分为正数和负数来记。正数的原码、反码和补码都是一样的,负数的原码符号位为1,反码是在原码的基础上进行改变:保持…

6. 使用python将多个Excel文件合并到同一个excel-附代码解析
【目录】 文章目录 6. 使用python将多个Excel文件合并到同一个excel-附代码解析1. 目标任务2. 结果展示3. 代码示例4. 代码解析4.1 导入库4.2 调用库的类、函数、变量语法4.3 os.listdir-返回目录中的文件名列表4.4 startswith-用于判断一个字符串是否以指定的前缀开头4.5 ends…
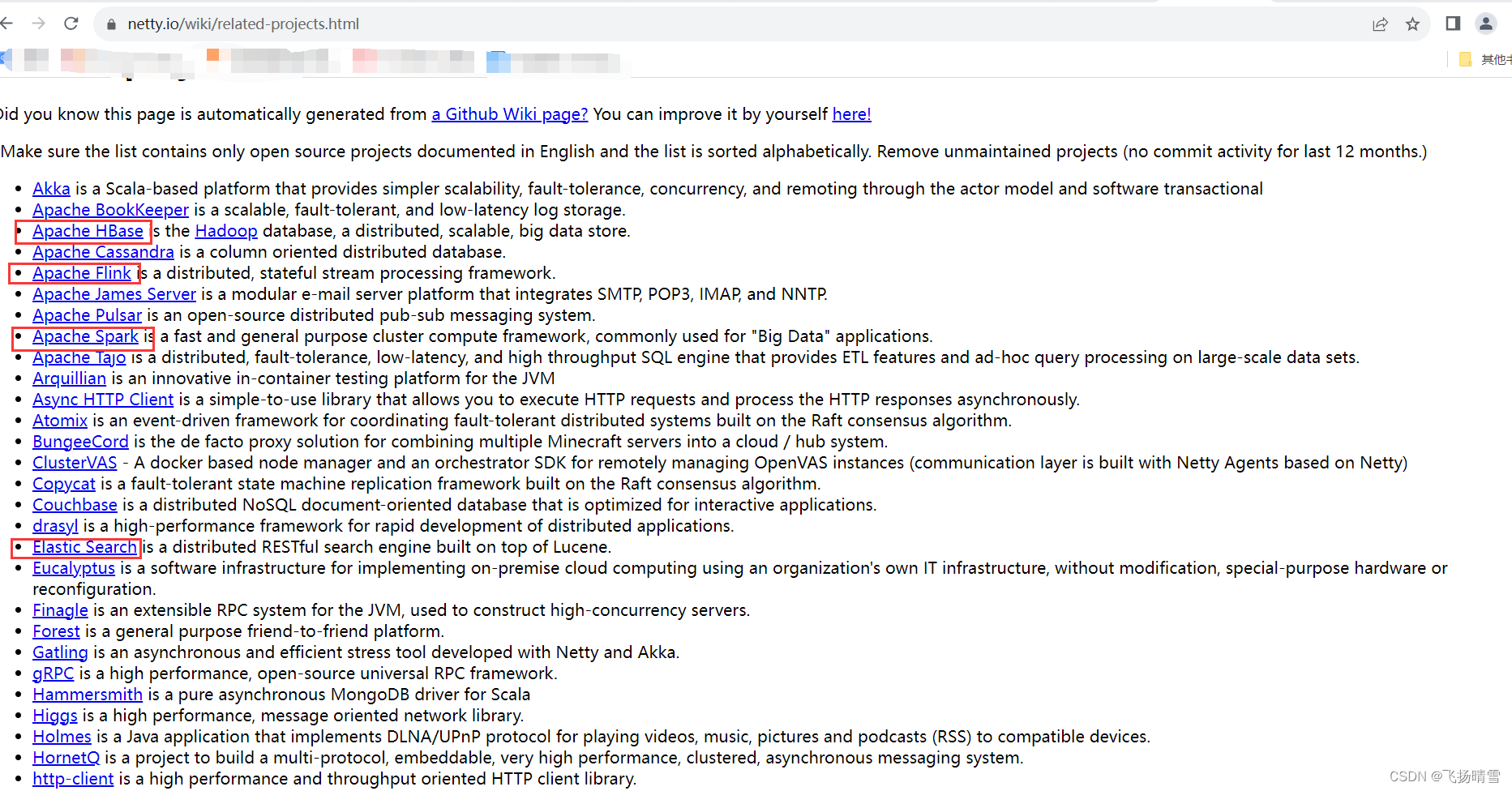
Netty入门学习和技术实践
Netty入门学习和技术实践 Netty1.Netty简介2.IO模型3.Netty框架介绍4. Netty实战项目学习5. Netty实际应用场景6.扩展 Netty 1.Netty简介
Netty是由JBOSS提供的一个java开源框架,现为 Github上的独立项目。Netty提供异步的、事件驱动的网络应用程序框架和工具&…

Docker 将容器打包成镜像推送镜像到仓库
Docker 将容器打包成镜像&推送镜像到仓库 一、将容器打包成镜像
$ docker commit <容器ID> <镜像名称:标签>示例:
$ sudo docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS …
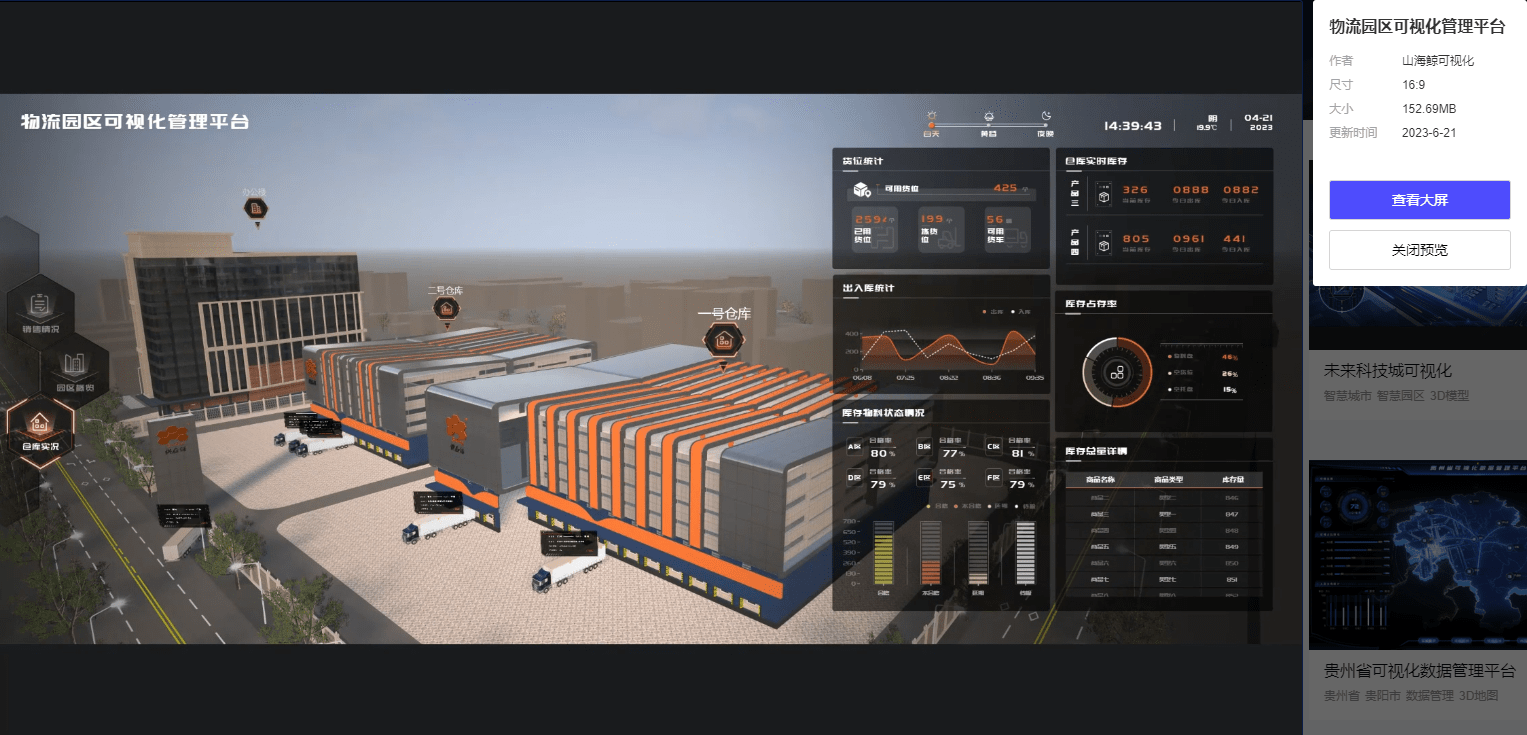
数字孪生:重塑制造、医疗和能源等领域的未来
数字孪生技术,作为虚拟仿真的重要领域,正以其强大的能力在各个行业中创造前所未有的创新。本文带大家一起深入探讨数字孪生技术在不同领域的广泛应用场景,展示其在实现效率、可靠性和智能化方面的积极影响。 制造业与工业领域
数字孪生技术在…

Python+TinyPNG熊猫网站自动化的压缩图片
前言 本篇在讲什么 PythonTinyPNG自动化处理图片 本篇需要什么 对Python语法有简单认知 依赖Python2.7环境 依赖TinyPNG工具 本篇的特色 具有全流程的图文教学 重实践,轻理论,快速上手 提供全流程的源码内容 ★提高阅读体验★ 👉…

抽象类和接口有什么区别?
在 Java 中,抽象类和接口是两种不同的类类型。它们都不能直接实例化,并且它们都是用来定义一些基本的属性和方法的,但它们有以下几点不同:
定义不同:定义的关键字不同,抽象类是 abstract,而接口…
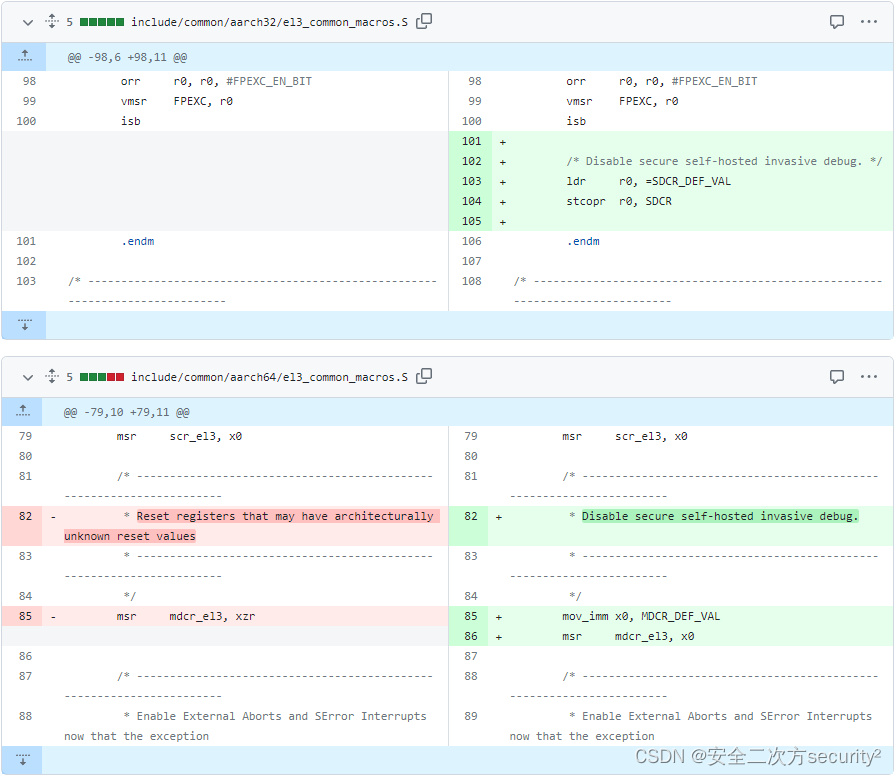
ATF(TF-A)安全通告 TFV-2 (CVE-2017-7564)
安全之安全(security)博客目录导读
ATF(TF-A)安全通告汇总
目录
一、ATF(TF-A)安全通告 TFV-2 (CVE-2017-7564)
二、 CVE-2017-7564 一、ATF(TF-A)安全通告 TFV-2 (CVE-2017-7564) Title 启用安全自托管侵入式调试接口,可允许非安全世界引发安全世界panic CV…

【LeetCode75】第三十七题 二叉树中的最长交错路径
目录 题目:
示例:
分析:
代码: 题目: 示例: 分析:
给我们一棵二叉树,问我们在这棵树里能找到的最长交错路径。最长交错路径就是在二叉树里一左一右一左一右这样走,最…
推荐文章