ARM架构及汇编
ARM芯片属于精简指令集计算机(RISC:Reduced Instruction Set Computer),它所使用的指令比较简单,有如下特点:
- 对内存只有读、写指令。
- 对于数据的运算实在CPU内部实现。
- 使用RISC指令的CPU复杂度小一点,易于设计。
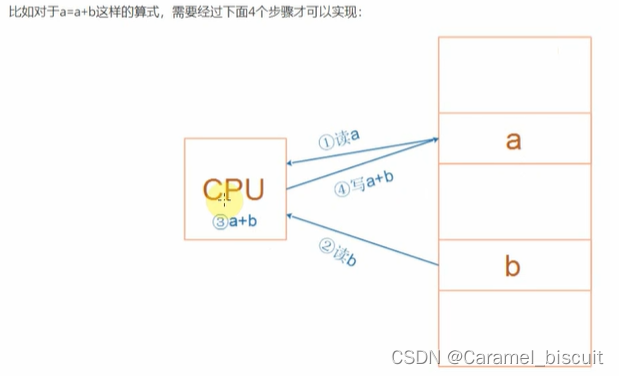
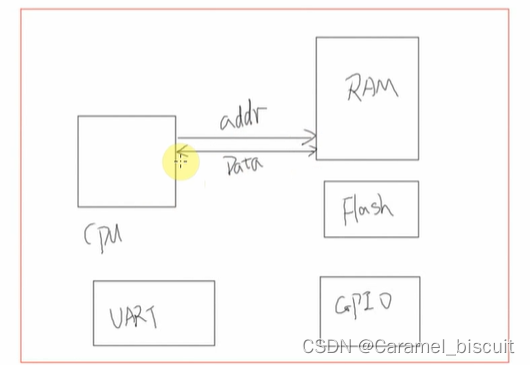
读a的值存放在CPU哪里?读b的值存放在CPU哪里?a+b的值保存在哪里?
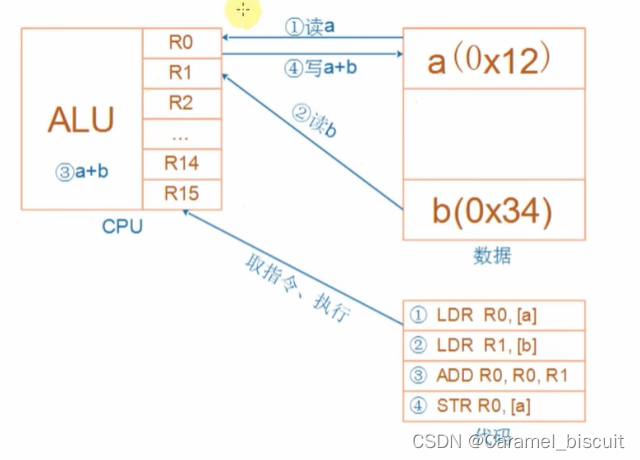
CPU内部有寄存器,用来存放上述所说的值。
我们所写的代码保存在Flash上,C语言被处理后变成汇编指令,CPU根据这些机器码来做出相应的事情。
汇编指令
读内存指令:LDR,即Load之意。
写内存指令:STR,即Store之意。
加减指令:ADD、SUB。
跳转:BL,即Branch And Link
入栈指令:PUSH
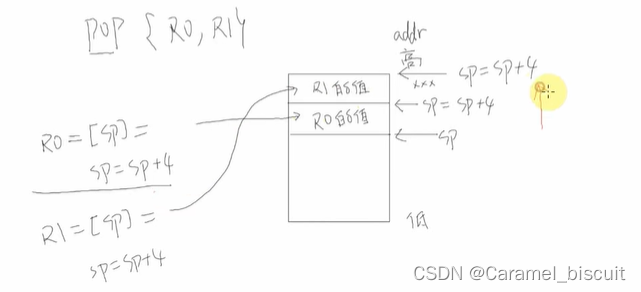
出栈指令:POP
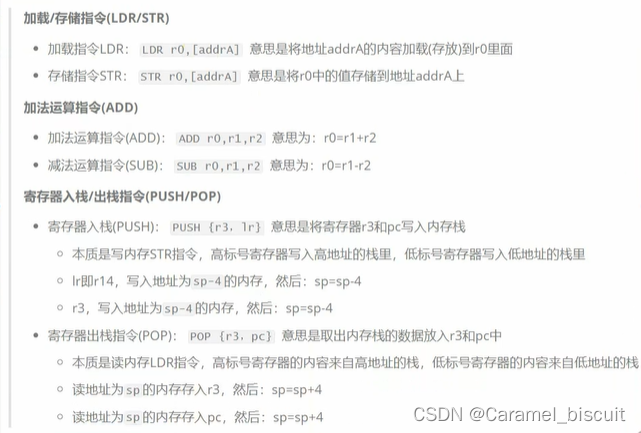
LDR R0,[R3]:去R3表示的内存读Data放入R0。(读4个字节)
STR R0,[R3]:把R0里的值写入到R3所指示的内存地址去。(4字节)
加减指令只在CPU内部实现,不涉及内存操作、
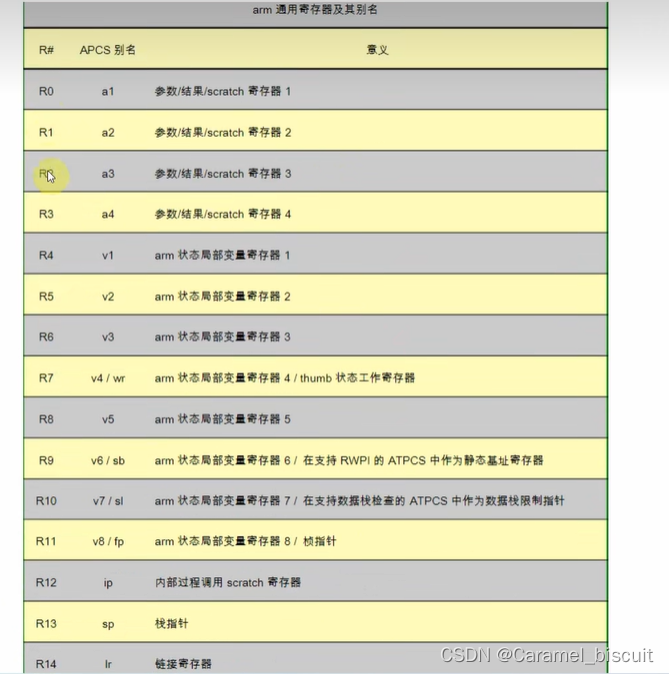
通用寄存器
PUSH {R0,R1},将这两个值推进栈里。在栈的操作里,高标号寄存器放在高地址,低标号寄存器放在低地址。
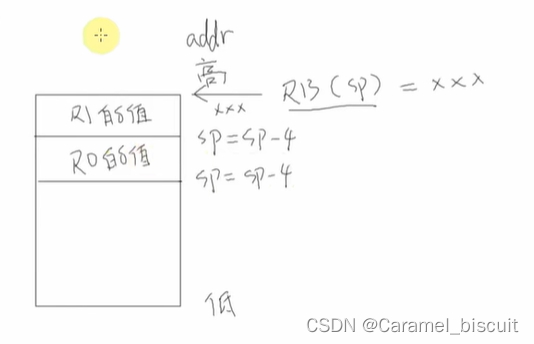
PUSH = 多次调用STR,且调整SP的值。
POP{R0,R1}:R0 = [SP] SP=SP+4 R1 = [SP] SP=SP+4
BL A:记录返回地址,保存在R14(LR);执行A,A执行完跳回地址。
什么叫线程?怎么保存线程
什么叫线程:运行中的函数,被暂停运行的函数。
怎么保存线程:把暂停瞬间的CPU寄存器值,保存进栈里。
线程核心拥有:
- 函数入口
- 栈(记录在控制块中)
- 线程控制块

- 分配线程控制块
- 分配栈
- 构造栈内容。
初始化静态线程时,任务控制块和栈是事先分配好的。
动态创建线程时,任务控制块是动态分配好的。
之所以要提供两种方式创建线程,是因为有些系统不支持动态分配内存,安全性非常高的系统里,不允许动态分配内存。
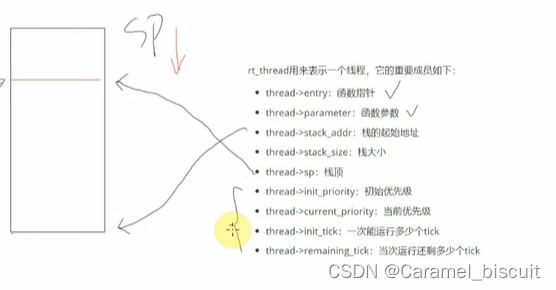
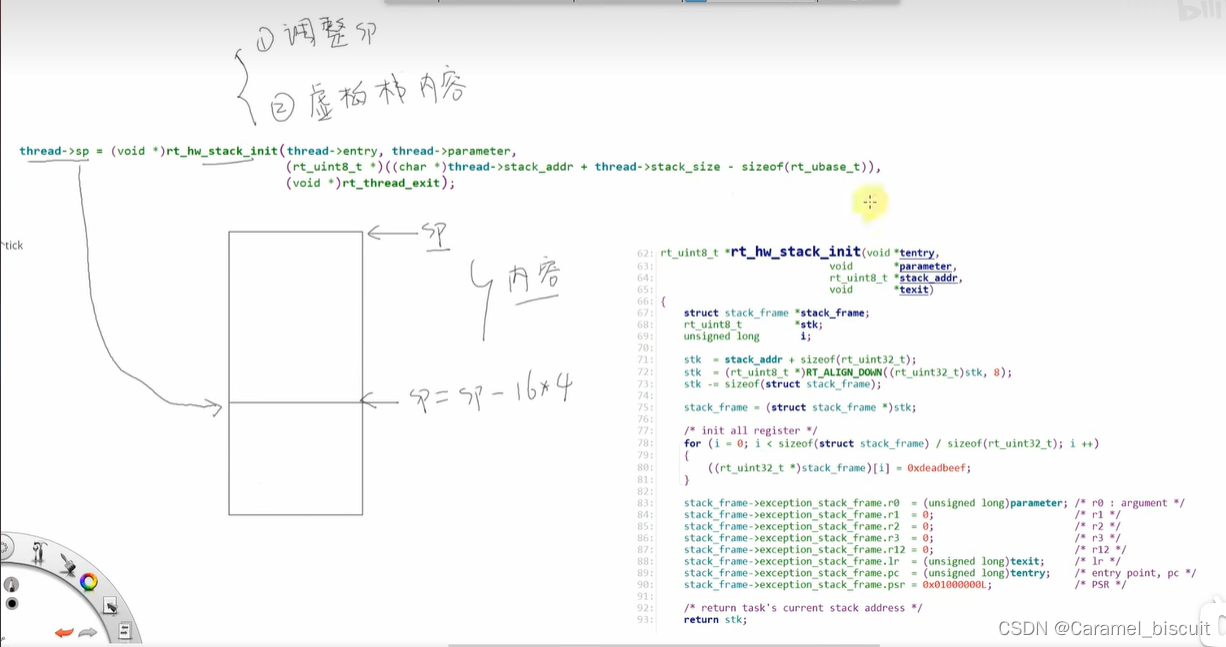
内容就是stack_frame
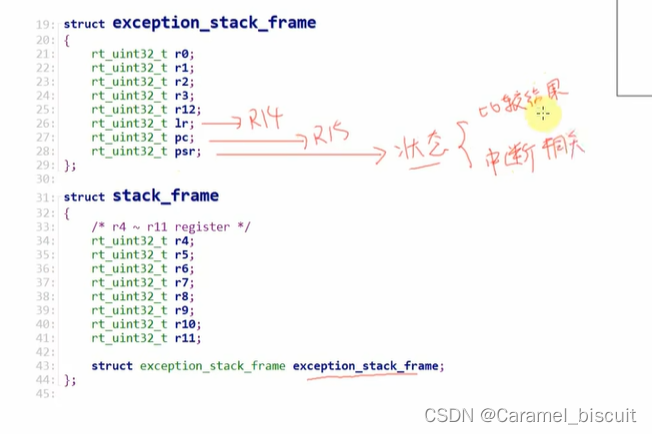
没有R13,R13是SP,直接保存在结构体中即可。
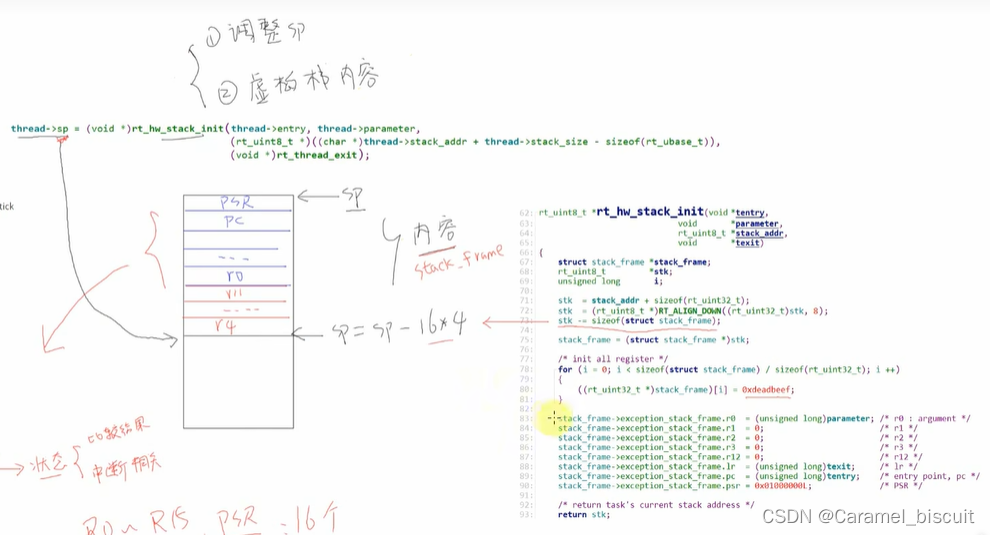
R0保存函数参数
PC保存函数入口
LR保存函数出口
线程调度
rt_list_t rt_thread_priority_table[RT_THREAD_PRIORITY_MAX];
rt_thread_priority_table[0]
…
rt_thread_priority_table[31]
每一个优先级都有一个就绪链表
同优先级线程,每次创建一个线程插入到链表尾部。
每次取链表第一个线程运行,运行一段时间后,放入链表尾部,再找出第一个线程运行。
rt_thread_startup()只是将线程放到就绪链表,还未开始启动。
rt_system_scheduler_start()才开始调度。
int rtthread_startup(void)
{rt_hw_interrupt_disable();/* board level initialization* NOTE: please initialize heap inside board initialization.*/rt_hw_board_init();/* show RT-Thread version */rt_show_version();/* timer system initialization */rt_system_timer_init();/* scheduler system initialization */rt_system_scheduler_init();#ifdef RT_USING_SIGNALS/* signal system initialization */rt_system_signal_init();
#endif/* create init_thread */rt_application_init();/* timer thread initialization */rt_system_timer_thread_init();/* idle thread initialization */rt_thread_idle_init();#ifdef RT_USING_SMPrt_hw_spin_lock(&_cpus_lock);
#endif /*RT_USING_SMP*//* start scheduler */rt_system_scheduler_start();/* never reach here */return 0;
}
/*** @ingroup SystemInit* This function will startup scheduler. It will select one thread* with the highest priority level, then switch to it.*/
void rt_system_scheduler_start(void)
{register struct rt_thread *to_thread;rt_ubase_t highest_ready_priority;to_thread = _get_highest_priority_thread(&highest_ready_priority);#ifdef RT_USING_SMPto_thread->oncpu = rt_hw_cpu_id();
#elsert_current_thread = to_thread;
#endif /*RT_USING_SMP*/rt_schedule_remove_thread(to_thread);to_thread->stat = RT_THREAD_RUNNING;/* switch to new thread */
#ifdef RT_USING_SMPrt_hw_context_switch_to((rt_ubase_t)&to_thread->sp, to_thread);
#elsert_hw_context_switch_to((rt_ubase_t)&to_thread->sp); //切换到新线程运行
#endif /*RT_USING_SMP*//* never come back */
}
static struct rt_thread* _get_highest_priority_thread(rt_ubase_t *highest_prio)
{register struct rt_thread *highest_priority_thread;register rt_ubase_t highest_ready_priority;#if RT_THREAD_PRIORITY_MAX > 32register rt_ubase_t number;number = __rt_ffs(rt_thread_ready_priority_group) - 1;highest_ready_priority = (number << 3) + __rt_ffs(rt_thread_ready_table[number]) - 1;
#elsehighest_ready_priority = __rt_ffs(rt_thread_ready_priority_group) - 1; //找出最高优先级
#endif/* get highest ready priority thread */highest_priority_thread = rt_list_entry(rt_thread_priority_table[highest_ready_priority].next,struct rt_thread,tlist);//找出就绪链表中的最高优先级的第一个线程*highest_prio = highest_ready_priority;return highest_priority_thread;
}
#endif
使用定时器和链表来理解时间片轮转
当前任务还可以运行多少个tick,在thread->remaining_tick中记录。
每发生一次中断,thread->remainning_tick减1。
当thread->remaining_tick等于0时,要让出CPU:调用rt_thread_yield();
void SysTick_Handler(void)
{/* enter interrupt */rt_interrupt_enter();HAL_IncTick();rt_tick_increase();/* leave interrupt */rt_interrupt_leave();
}
oid rt_tick_increase(void)
{struct rt_thread *thread;/* increase the global tick */
#ifdef RT_USING_SMPrt_cpu_self()->tick ++;
#else++ rt_tick; //全局变量tick值+1
#endif/* check time slice */thread = rt_thread_self();-- thread->remaining_tick; //当前线程剩余时间-1if (thread->remaining_tick == 0){/* change to initialized tick */thread->remaining_tick = thread->init_tick;thread->stat |= RT_THREAD_STAT_YIELD;/* yield */rt_thread_yield();}/* check timer */rt_timer_check();
}如果有更高优先级线程,即使当前线程时间片没用完,也会立刻被抢占。
当它被抢占后,再次运行时:继续运行完剩下的时间。