用Verilog 实现一个帧结构的串行数据接收器;
- 串行数据输入为:NRZ数据加位时钟(BCL)格式,高位在前
帧结构为:8位构成一个字,64字构成一个帧。每帧的第一个字为同步字。 - 同步字图案存储在可由CPU读写的同步字寄存器(端口地址00H)中
串行接受器在连续检测到3个同步图案后,开始接受数据,并向CPU中传送数据。串行数据接收器每接收到一个字,先送到数据寄存器中, CPU以I/O读方式,从数据寄存器中读取数据(端口地址为01H) - 若数据寄存器已满,再有数据写入时,则覆盖原有的数据。在数据寄存器为空时,CPU从数据寄存器中读到的数据将是同步字寄存器的内容。
在接收数据过程中,若任何一帧的同步字不匹配,则进入到头步状态,停止数据接收。失步后,必须重新同步(连续检测到3个同步图案),然后开始新的数据接收。 - 寄存器的读写采用和8031类似的控制方式,有关信号包括:双向数据(DATA[7:0])、I/O地址(ADDR[7:0])、I/O写(IOW)、和I/O读(IOR),其中IOW和IOR都是低电平有效
- 设计者可以根据需要增加其它的输入输出信号
设计分析
- 端口
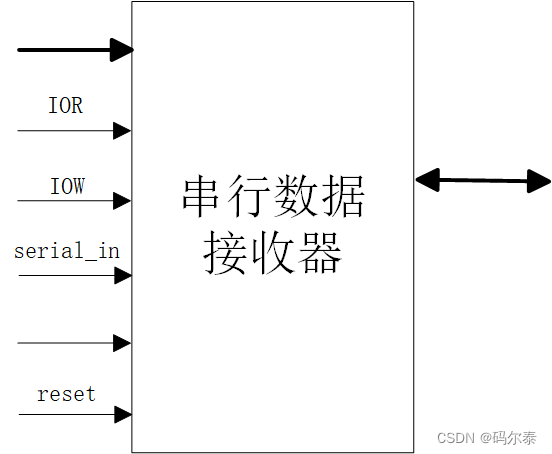
- 输入数据和时钟之间的关系

- 帧结构
8位构成一个字,64字构成一个帧。每帧的第一个字为同步字。
连续检测到三个同步帧,即连续三个同步头和同步图案一样的帧,才开始进行数据接收 - 详细设计-工作阶段非常明显
- 失步阶段:检测同步头,根据情况确定是否转入同步状态
- 同步阶段:检测同步头,如果匹配则接收数据,仍然处于同步阶段;否则转入失步状态。
- 注意:是台下检测i的一个同步字时需要每个时钟周期都要进行比较
- 实现思路:采用状态机进行实现
- 状态转换的控制
- 计数器:接收位计数–>字,字计数–>数据帧
- 比较器:枕头数据与同步字的比较
- 两个状态

该状态转换关系从功能需求很容易得出
难点:需要检测三个连续的同步帧才能从失步态到同步态
控制不清晰 - 四状态划分

实现难点:每个帧持续8*64个时钟周期,其中第8个时钟周期结束需要同步头比较,后面的504个时钟周期接收数据(同步态)或空等(失步态) - 8个状态
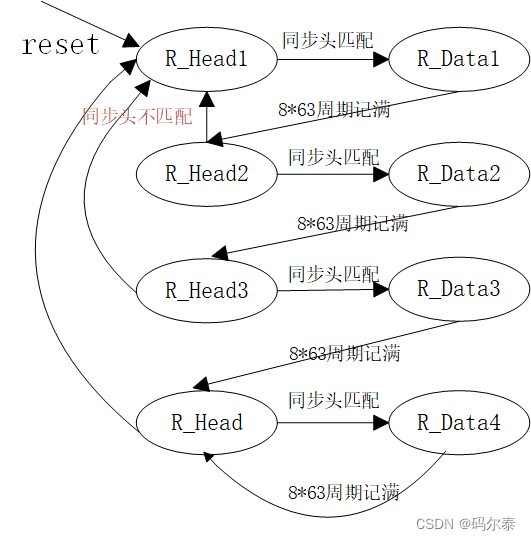
- 在每个状态,省略了自身状态转移的情况
- 每个R_Headx状态持续八个周期(Read_Head1)除外
- 每个R_Datax状态持续504个周期
- 需要设计一个记8和一个记64的计数器辅助进行控制
- 代码部分
完整代码
module S2P (reset,clk,serial_in,ior,iow,address,data
);input reset;input clk;input serial_in;input ior;input iow;input [7:0] address;input [7:0] data;reg [7:0] Data;reg counter8_en,counter504_en,counter8_clr,counter504_clr;reg [2:0] counter8;reg [8:0] counter504;reg [7:0] shifter,data_reg,sync_word;reg [2:0] pres_state,next_state;parameter R_Head1 = 3'b000,R_Data1 = 3'b001,R_Head2 = 3'b010,R_Data2 = 3'b011,R_Head3 = 3'b100,R_Data3 = 3'b101,R_Head = 3'b110,R_Data = 3'b111; always @(posedge reset or posedge clk) beginif (reset) pres_state = R_Head1;else pres_state = next_state;endalways @(pres_state,shifter,counter8,counter504) begincase(pres_state)R_Head1: if (shifter == sync_word) next_state = R_Data1;else next_state = R_Head1;R_Data1: if (counter504 == 9'b0) next_state = R_Head2;else next_state = R_Data1;R_Head2: if (counter8 == 3'b0) beginif (shifter == sync_word) next_state = R_Data2;else next_state = R_Head1;end else next_state = R_Head2;R_Data2: if (counter504 == 9'b0) next_state = R_Head3;else next_state = R_Data2;R_Head3: if (counter8 == 3'b0) beginif (shifter == sync_word) next_state = R_Data3;else next_state = R_Head1;end else next_state = R_Head3; R_Data3: if (counter504 == 9'b0) next_state = R_Head;else next_state = R_Data3;R_Head: if (counter8 == 3'b0) beginif (shifter == sync_word) next_state = R_Data;else next_state = R_Head1;end else next_state = R_Head;R_Data: if (counter504 == 9'b0) next_state = R_Head;else next_state = R_Data;default: next_state = pres_state;endcaseendalways @(posedge reset or posedge clk) beginif (reset) shifter = 8'b0;else shifter = {serial_in,shifter[7:1]};endalways @(posedge clk or posedge reset) beginif (reset) counter8 = 3'b111;else beginif (counter8_clr) counter8 = 3'b111;else if (counter8_en)counter8 = counter8 - 1; endendalways @(posedge clk or posedge reset) beginif (reset) counter504 = 3'b111;else beginif (counter504_clr) counter504= 3'b111;else if (counter504_en)counter504 = counter504 - 1; endendalways @(pres_state) beginif (pres_state == R_Data1 || pres_state == R_Data2 || pres_state == R_Data3 || pres_state == R_Data)counter8_clr = 1'b1;else counter8_clr = 1'b0;endalways @(pres_state) beginif (pres_state == R_Head2 || pres_state == R_Head3 || pres_state == R_Head) counter8_en = 1'b1;else counter8_en = 1'b0;endalways @(pres_state) beginif (pres_state == R_Head1 || pres_state == R_Head2 || pres_state == R_Head3 || pres_state == R_Head) counter504_clr = 1'b1;else counter504_clr = 1'b0;endalways @(pres_state) beginif (pres_state == R_Data1 || pres_state == R_Data2 || pres_state == R_Data3 || pres_state == R_Data) counter504_en = 1'b1;else counter504_en = 1'b0;endalways @(posedge reset or posedge clk)if (reset) data_reg = 8'b0;else if (counter504_en == 1'b1 && counter504[2:0] == 3'b0) data_reg = shifter;always @(posedge reset or posedge clk) beginif (reset) sync_word = 8'b0;else if (iow == 1'b0 && address == 8'b0) sync_word = data;endalways @(ior or address or data_reg) if (ior == 1'b0&&address == 8'b1) Data = data_reg;else Data = 8'bz;assign data = Data;
endmodule