文章目录
- 1.模数转换器(ADC)是什么?
- 手册说明:
- 2.STC32G单片机ADC使用原理
- 19.1.1 ADC控制寄存器(ADC_CONTR)
- 19.1.2 ADC配置寄存器(ADCCFG)
- 19.1.4ADC时序控制寄存器(ADCTIM)
- 19.3 ADC相关计算公式
- 3.编写最简单的ADC采集代码(查询&中断)
- P10的引脚去获取一个ADC代码
- 中断方式ADC的实现
- 3.编写最简单的ADC采集代码
- 总结
- 课后练习:
1.模数转换器(ADC)是什么?
参考资料:adc模数转换器的作用。
模数转换器即A/D转换器,或简称ADC(Analog-to-digital converter),通常是指一个将模拟信号转变为数字信号的电子元件。
模拟信号 -> 电压
数字信号 -> 0和1组成的二进制数
那我们思考下我们单片机是怎么把模拟信号转化为数字信号的呢?
原理演示视频:见B站《逐次逼近型ADC转换过程的动画演示》。
简单的总结一下ADC到底是一个什么样的原理?
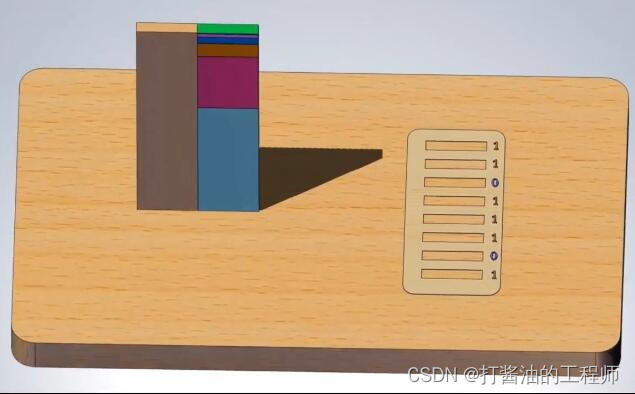
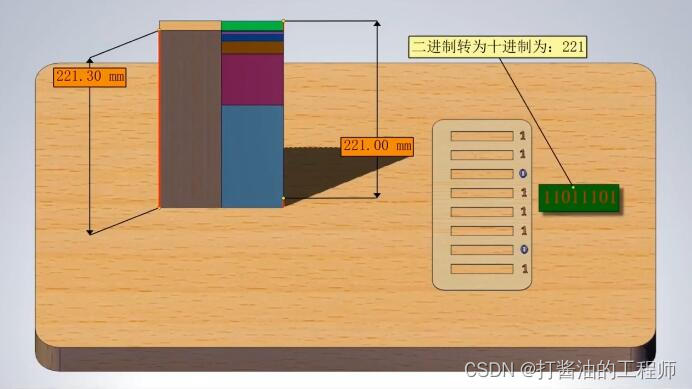
如果没有超,就写1,如果超了就写0.
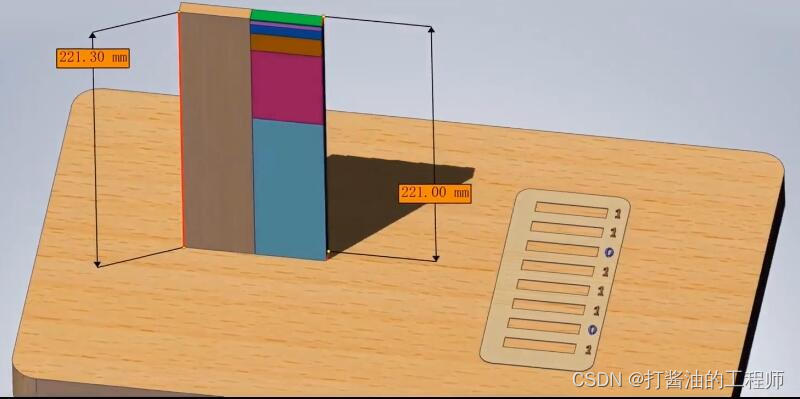
分别测量一下两组板子的高度,从大到小一级一级的给它比较上去
结束以后是221.
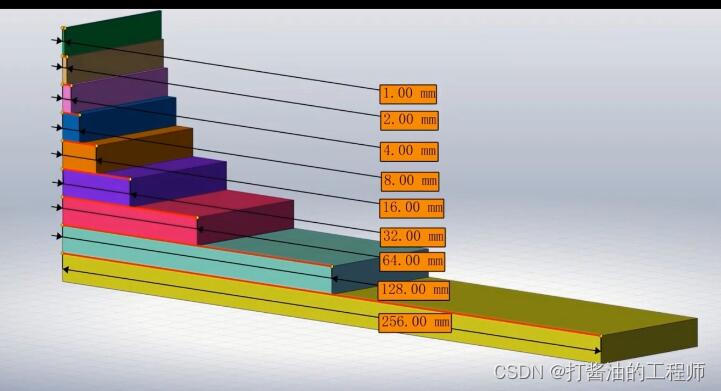
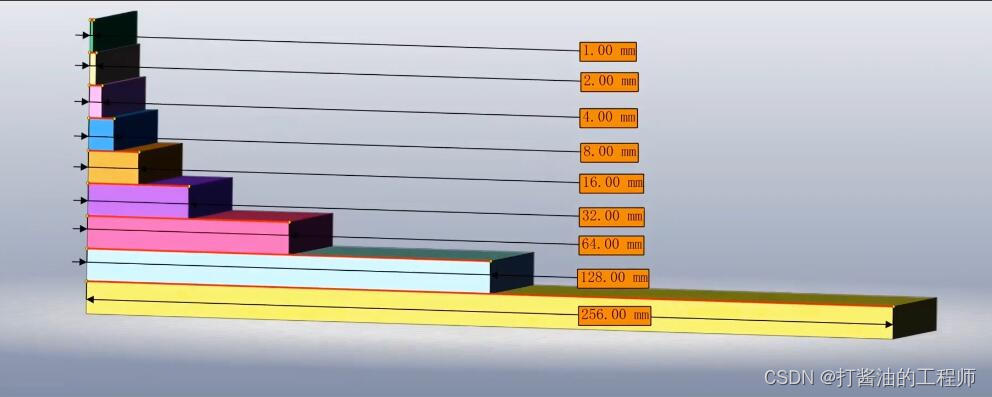
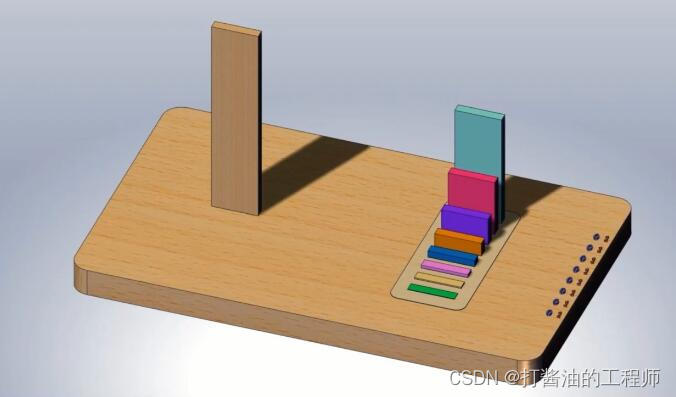


如果增加比较的位数,精度更高:


当然这个位数也不是能一直无限制的高下去,毕竟环境噪声也会对他有所千扰(精度太高吹回气就有误差了)。
一般的话12位到16位绰绰有余。这就是ADC的一个转化的一个过程,一位一位的逐次转化。
手册说明:
ADC模数转换、传统DAC实现
STC32G系列单片机内部集成了一个12位高速AD转换器。ADC的时钟频率为系统频率。分频再经过用户设置的分频系数进行再次分频(ADC的时钟频率范围为SYSclk/2/1~SYSclk/2/16)。
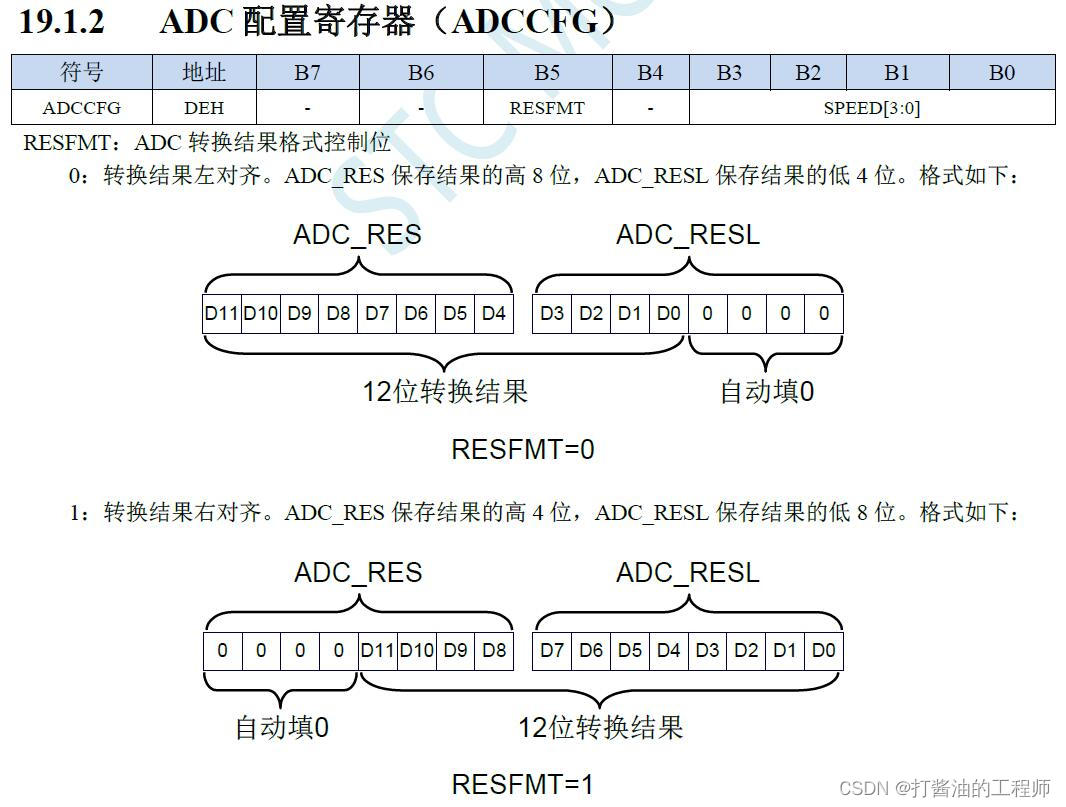
ADC转换结果的数据格式有两种:左对齐和右对齐。可方便用户程序进行读取和引用。
注意:ADC 的第15通道是专门测量内部 1.19V参考信号源的通道,参考信号源值出厂时校准为1.19V,由于制造误差以及测量误差,导致实际的内部参考信号源相比1.19V,大约有土1%的误差。如果用户需要知道每一颗芯片的准确内部参考信号源值,可外接精准参考信号源,然后利用ADC的第15通道进行测量标定。ADC_VRef+脚外接参考电源时,可利用ADC的第15通道可以反推ADC_VRef+脚外接参考电源的电压;如将ADC_VREF+短接到MCU-VCC,就可以反推 MCU-VCC的电压。
如果芯片有ADC 的外部参考电源管脚ADC_VRef+,则一定不能浮空,必须接外部参考电源或者直接连到VCC。
假设单片机的基准电压为2.96V,以5V为例,比较结果如下:

注意:使用ADC功能时有Vref引脚的单片机千万千万千万不能悬空,必须接外部参考电压源或者VCC!!!
2.STC32G单片机ADC使用原理
19.1.1 ADC控制寄存器(ADC_CONTR)
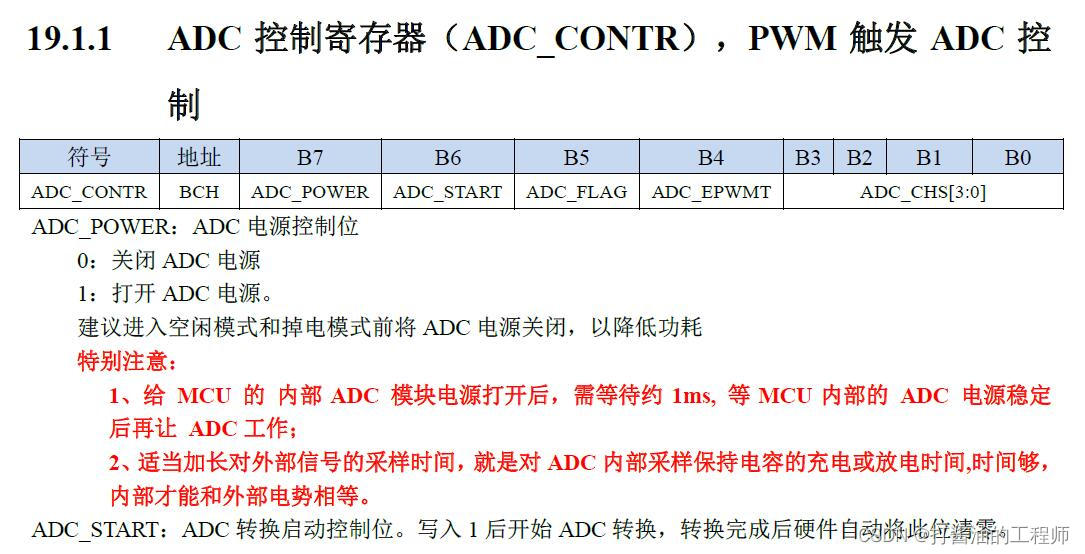
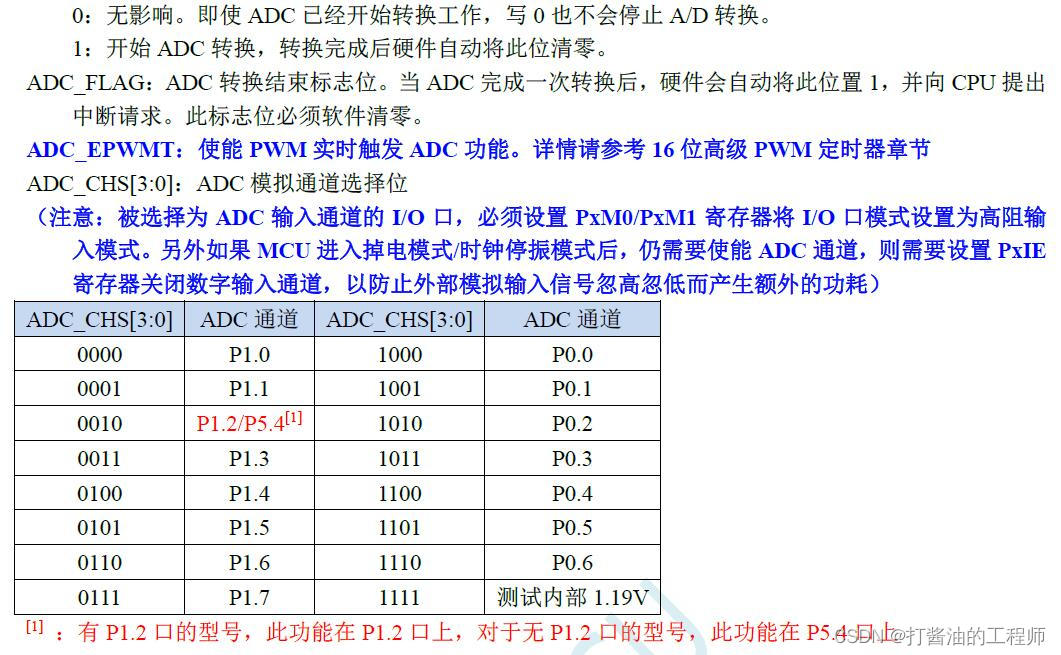
只有15个引脚,可以使用单片机的ADC,不是所有引脚都能使用ADC功能,只有指定的这个ADC的通道(1.19V参考),这15个才能进行ADC的一个转化。
ADC_EPWMT:使能PWM实时触发ADC功能。详情请参考16位高级PWM定时器章节,本节暂时略过,不详细探讨。
如ADC_CHS3:0写0000,就可以使用P1.0。
19.1.2 ADC配置寄存器(ADCCFG)
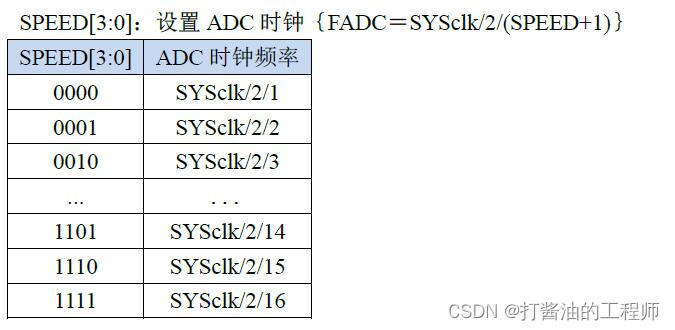
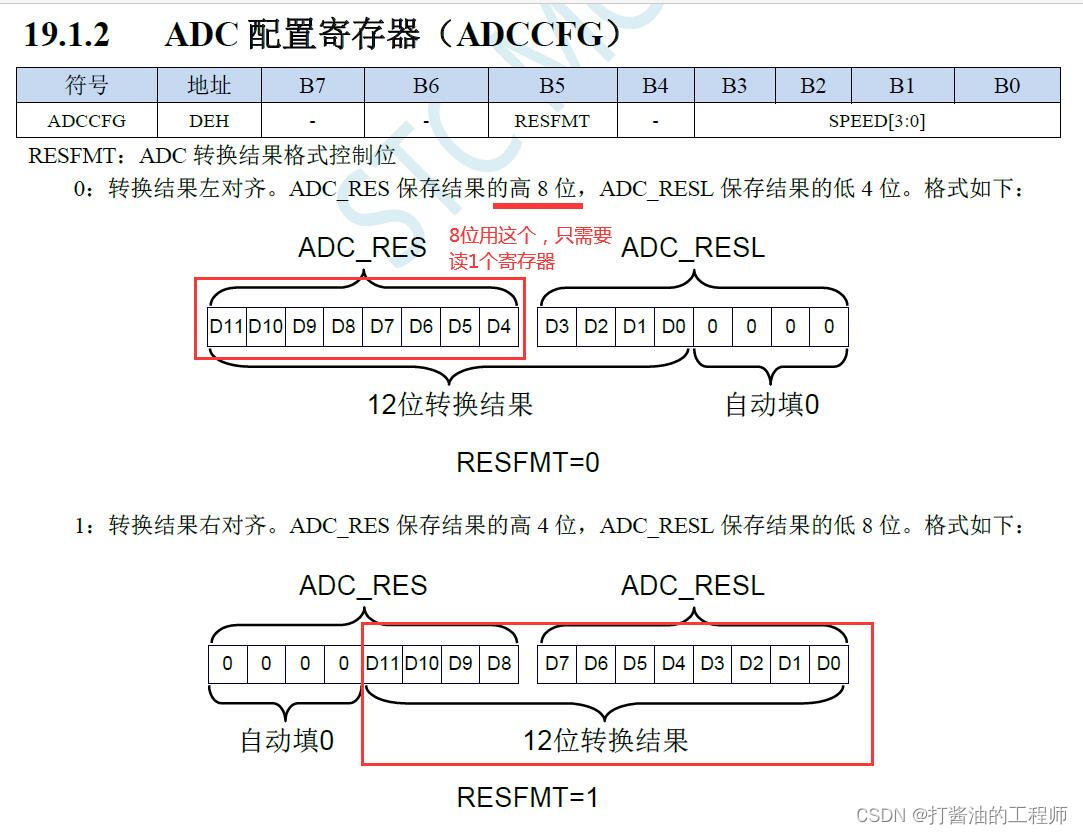
时钟建议选一个慢一点的时钟,设置的时间可以看{FADC=SYSclk/2/(SPEED+1)},不继续深入。实际上ADC大部分使用的情况都和时间没有太大影响。
时钟选择手册中的默认值就可以。
19.1.4ADC时序控制寄存器(ADCTIM)
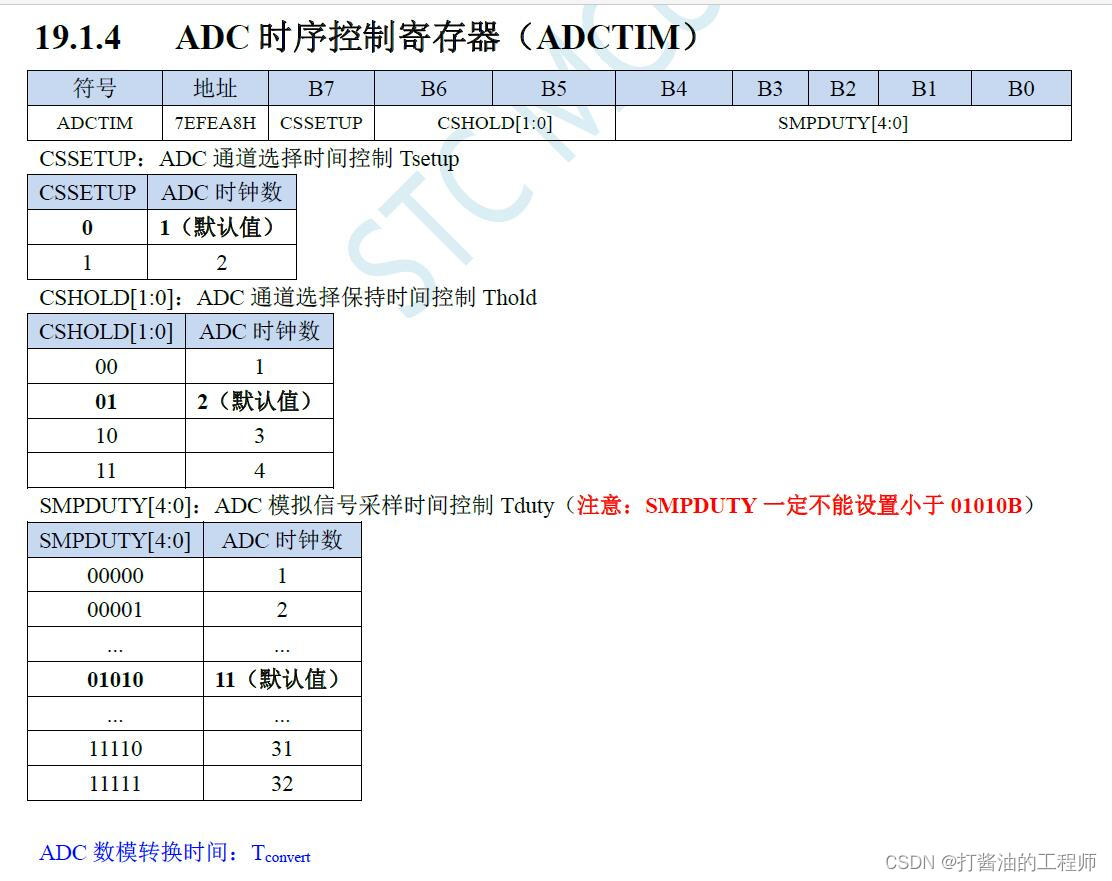
一般建议均使用默认值。(注意:SMPDUTY一定不能设置小于01010B),即从参数图上看,建议往下不要再往上走。
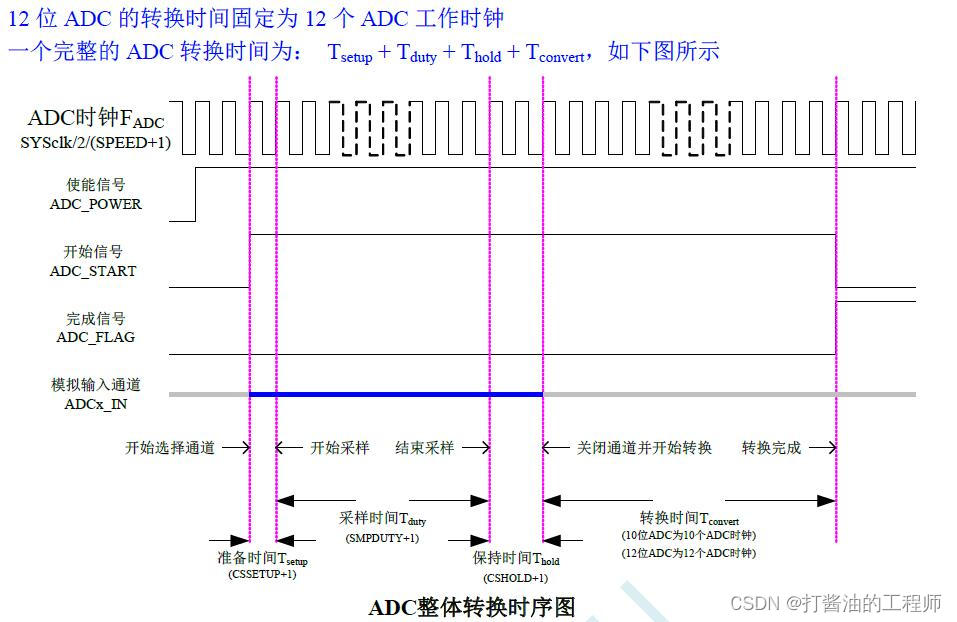
12位ADC的转换时间固定为12个ADC工作时钟。
一个完整的ADC转换时间为:Tsetup+Tduty+ Thold+Tconvert、如下图所示:
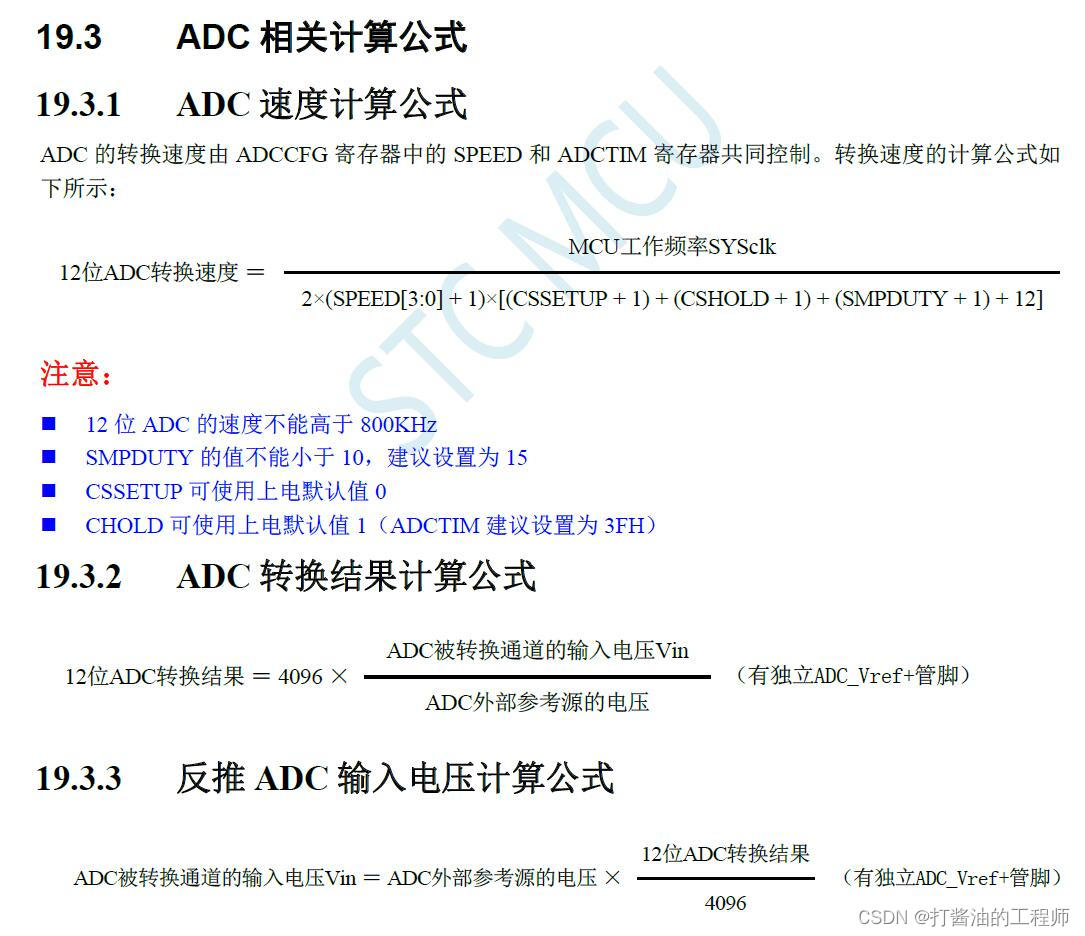
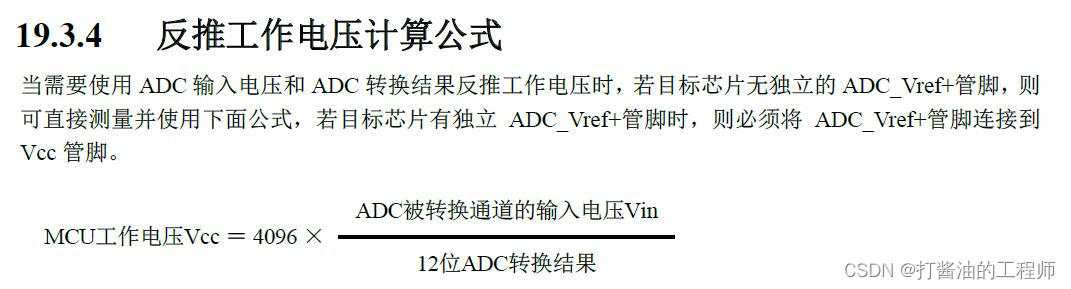
19.3 ADC相关计算公式
19.3.1 ADC速度计算公式本次不涉及。
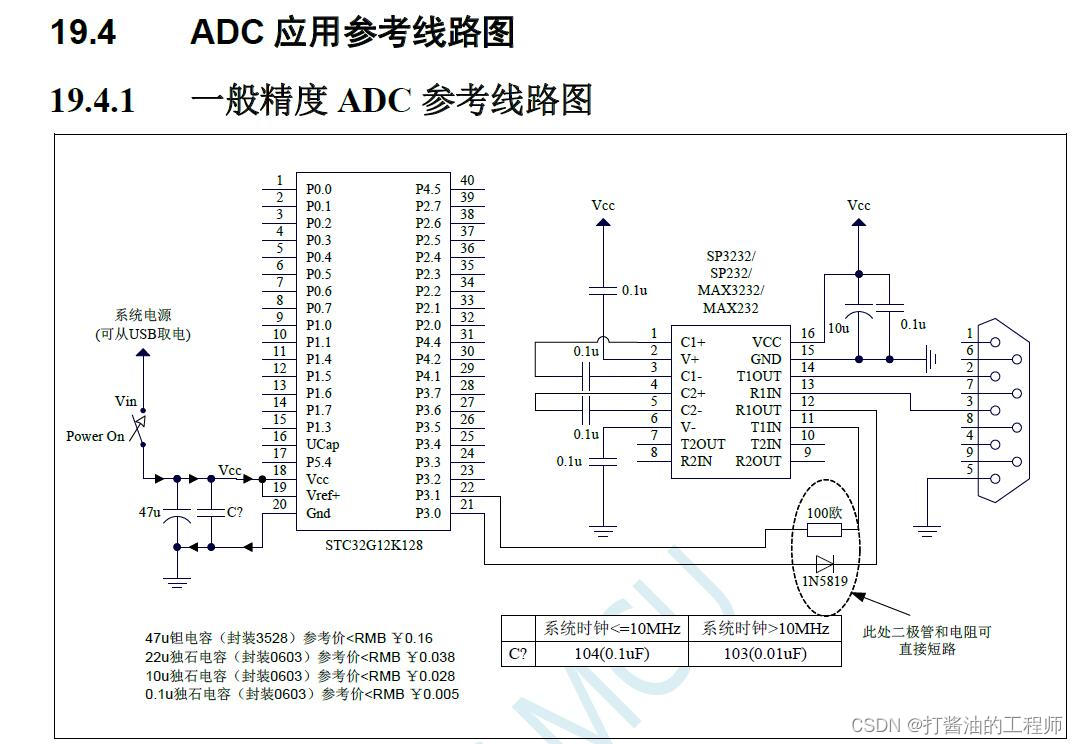
19.4.1 一般精度ADC参考线路图
19.4.2高精度ADC参考线路图
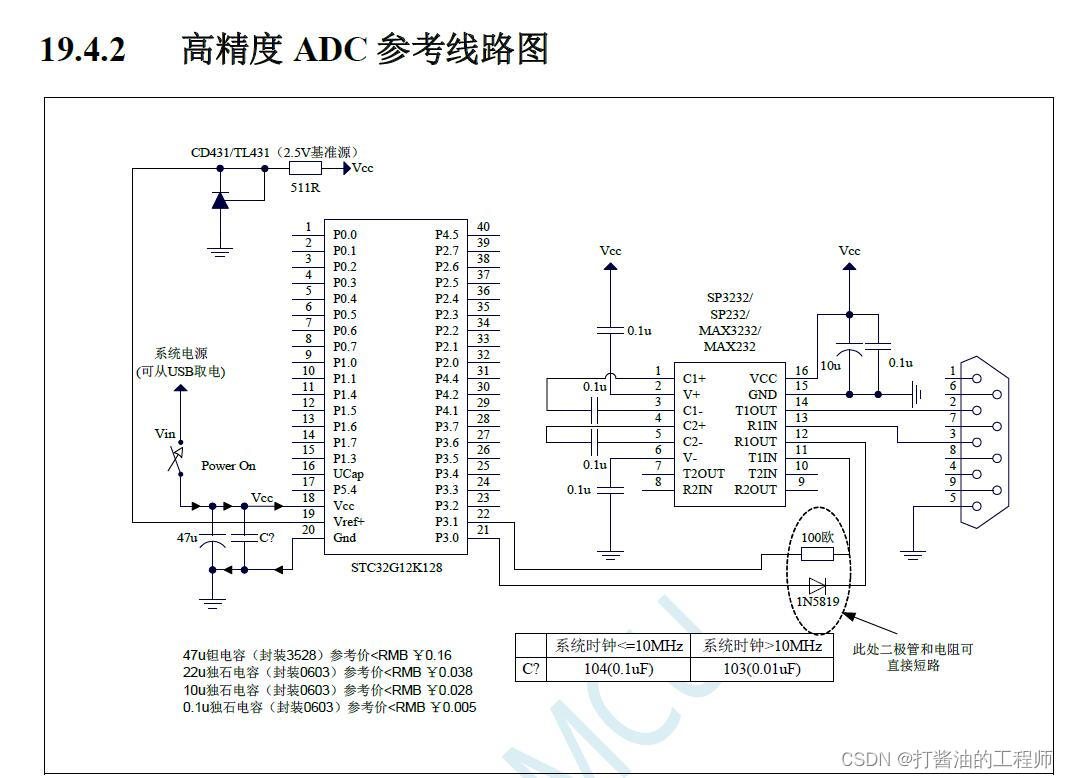
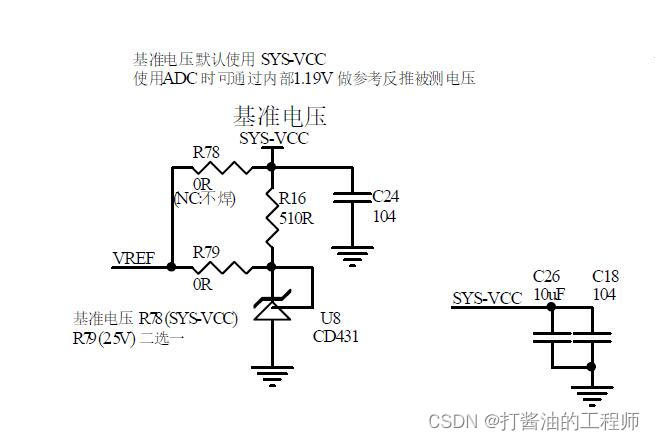
两者的主要区别在于VREF的处理,高精度的ADC有独立的基准2.5V电压源。
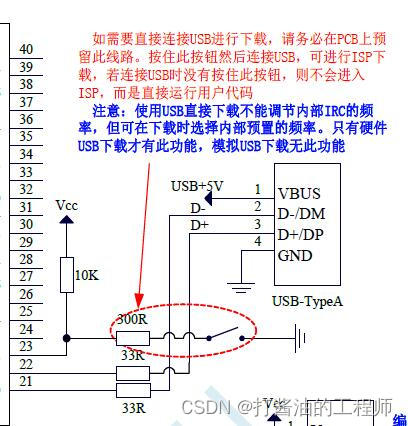
不建议使用串口电路,易受供电电压波动影响。
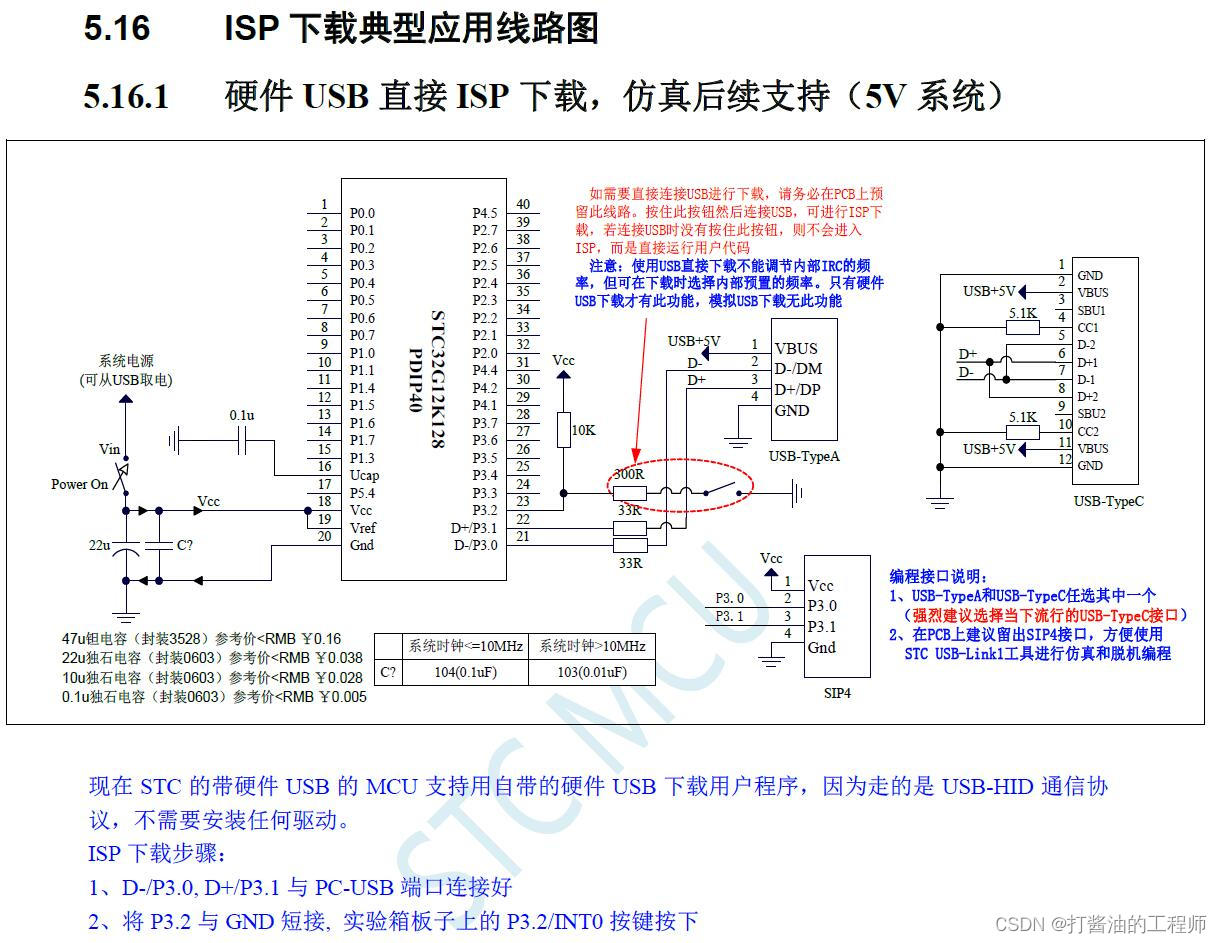
建议使用:ISP下载典型应用线路图中的USB接线电路,比串口更方便,更实用。
3.编写最简单的ADC采集代码(查询&中断)
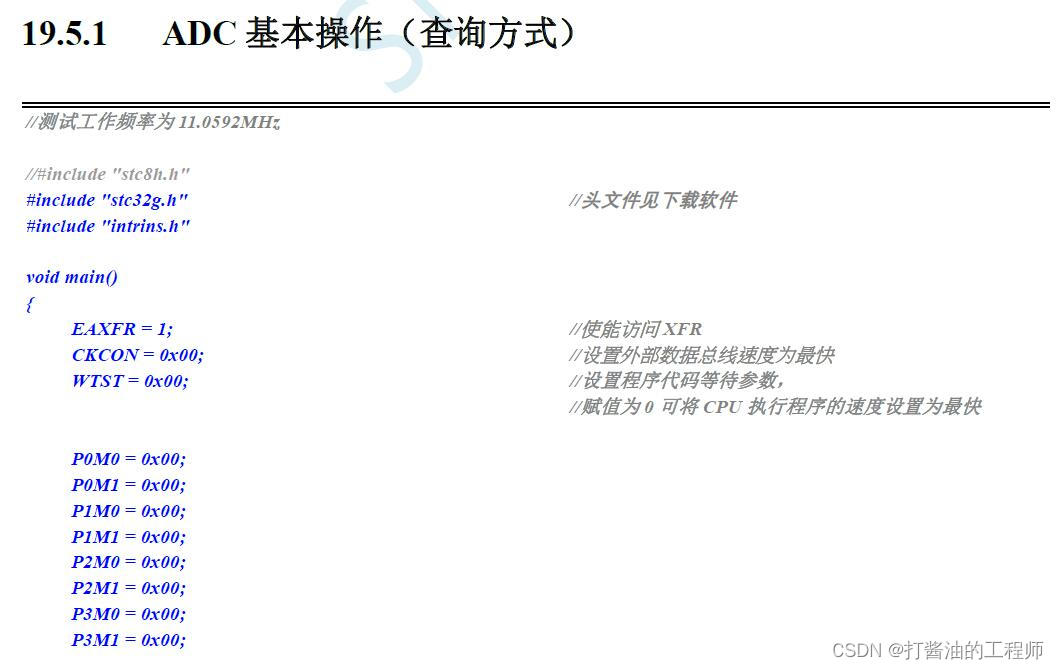
官方查询方式例程为:
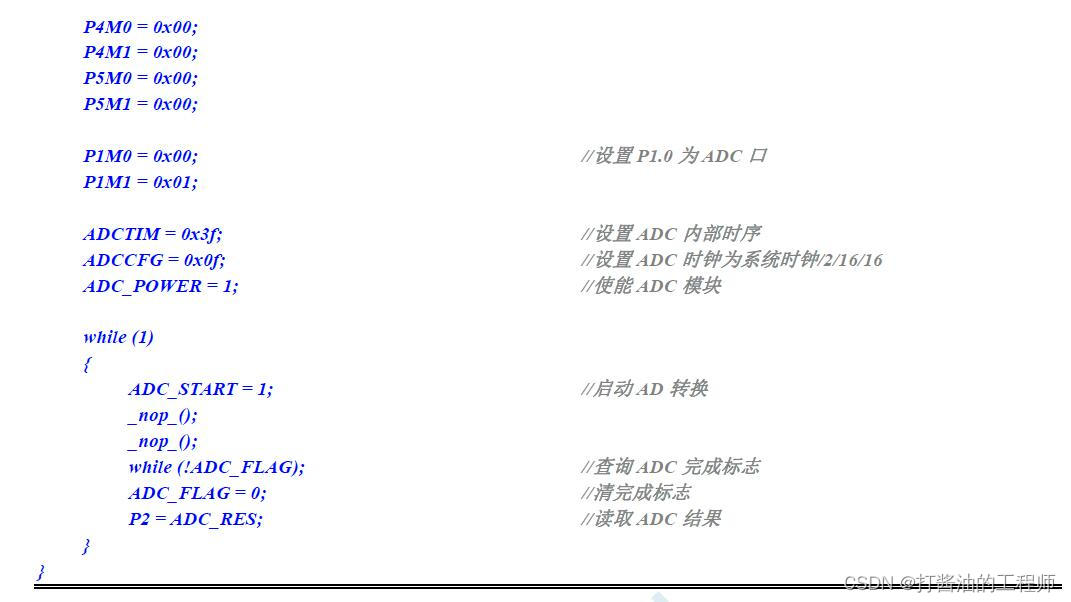
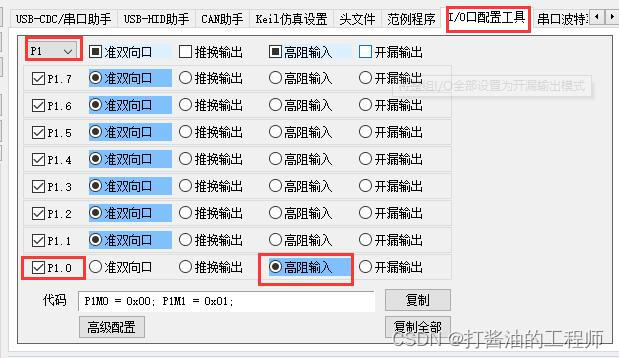
P1M0= 0x00;P1M1 = 0x01; //将IO口P1.0设置为高阻状态。
可以在STC-ISP中找到相应设置,选择接口和拟设置的端口模式,自动生成代码,可以直接复制。
三个主要的寄存器配置:
ADCTIM= 0x3f; //设置ADC内部时序 0x3f=0011 1111
ADCCFG= 0x0f; //设置ADC时钟为系统时钟/2/16/16
ADC_POWER = 1; //使能ADC模块
编写代码之前,需要看一下原理图(实验箱9.6_2022-12-05-SCH)上,我们的芯片ADC使用哪个引脚:
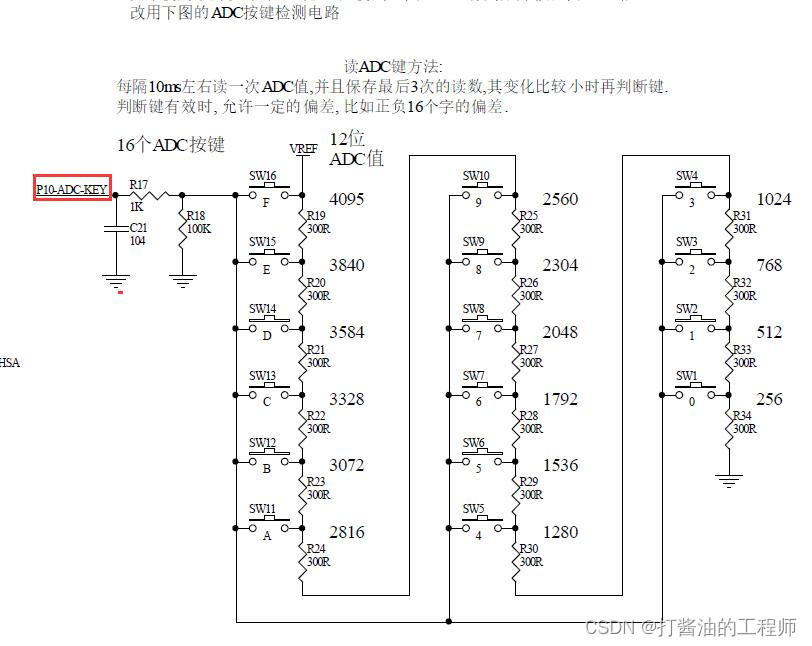
P10的引脚去获取一个ADC代码
以上节的12.IO中断为模板,复制并修改为13.ADC模拟电压采集.
\HARDWARE文件夹下新建ADC子目录,并新建adc.c和adc.h,把ADCH添加进我们的路径里。添加.h文件模板,在.c和主文件内引用。
我们把它我们的ADC也先初始化一下,添加函数声明及定义。
adc.h为:
#ifndef __ADC_H
#define __ADC_H#include "COMM/stc.h" //调用头文件
#include "COMM/usb.h"//------------------------引脚定义------------------------////------------------------变量声明------------------------////------------------------函数声明-----------------------//
void ADC_Init(void); //ADC初始化
u16 ADC_Read(u8 no ); //ADC读取指定通道的adc电压
#endif
adc.c为:
#include "adc.h"
#include "intrins.h"//========================================================================
// 函数名称:ADC_Init
// 函数功能:ADC初始化
// 入口参数:无
// 函数返回:无
// 当前版本: VER1.0
// 修改日期: 2023
// 当前作者:
// 其他备注:
//========================================================================
void ADC_Init(void) //ADC初始化
{P1M0 = 0x00; //设置P1.0引脚为高阻输入,参考点亮LED章节P1M1 = 0x01;ADCTIM= 0x3f; //设置ADC内部时序 0x3f=0011 1111ADCCFG= 0x2f; //设置ADC为数据右对齐。时钟为系统时钟/2/16/16 0x2f=0010 1111ADC_POWER = 1; //使能ADC模块
}//========================================================================
// 函数名称:ADC_Read
// 函数功能:读取指定通道的adc电压
// 入口参数: @no:通道0-15
// 函数返回:当前的12位adc数值
// 当前版本: VER1.0
// 修改日期: 2023
// 当前作者:
// 其他备注:
//========================================================================u16 ADC_Read(u8 no) //读取指定通道的adc电压
{u16 adcval; //adc数值保存变量ADC_CONTR &= 0xf0; //清空通道,要保持它的低4位为0ADC_CONTR |= no; //选择通道ADC_START = 1; //开启ADC通道_nop_();_nop_(); //空操作指令,比delay远远短while(!ADC_FLAG); //等待转换结束。ADC_FLAG:ADC转换结束标志位。当ADC完成一次转换后,硬件会自动将此位置1,并向CPU提出中断请求。ADC_FLAG = 0; //此标志位必须软件清零。adcval = (ADC_RES << 8) + ADC_RESL; //计算adc的数值,我们这边给它右对齐一下(最高4位恒定是0)return adcval;
}
在主函数里面,去循环的读取那个adc的数值。新建u16变量,保存adc的数值:u16 ADC_VAL; //ADC的数值
demo.c:
#include "COMM/stc.h" //调用头文件
#include "COMM/usb.h"
#include "seg_led.h"
#include "key.h" //调用头文件
#include "beep.h"
#include "tim0.h"
#include "exit.h"
#include "adc.h"#define MAIN_Fosc 24000000UL //定义主时钟char *USER_DEVICEDESC = NULL;
char *USER_PRODUCTDESC = NULL;
char *USER_STCISPCMD = "@STCISP#";bit TIM_10MS_Flag; //10ms标志位void sys_init(); //函数声明
void delay_ms(u16 ms);void Timer0_Isr(void);u16 Time_CountDown = 0; //全局变量,文件里所有地方都可以调用 大于255定义u16void main() //程序开始运行的入口
{u16 ADC_VAL; //ADC的数值sys_init(); //USB功能+IO口初始化usb_init(); //usb库初始化Timer0_Init(); //定时器0初始化ADC_Init();EA = 1; //CPU开放中断,打开总中断。while(1) //死循环{delay_ms(2); //让USB稳定下来
// if( DeviceState != DEVSTATE_CONFIGURED ) //
// continue;if( bUsbOutReady ){usb_OUT_done();}if(TIM_10MS_Flag == 1) //将需要延时的代码部分放入{TIM_10MS_Flag = 0; //TIM_10MS_Flag 变量清空置位}ADC_VAL = ADC_Read(0); //保存ADC的数值,使用P10,即取0printf("当前ADC数\XFD值:%d\r\n",(int)ADC_VAL); //打印ADC的数值,直接打印会出乱码,数后面需要加\XFD}
}void sys_init() //函数定义
{WTST = 0; //设置程序指令延时参数,赋值为0可将CPU执行指令的速度设置为最快EAXFR = 1; //扩展寄存器(XFR)访问使能CKCON = 0; //提高访问XRAM速度P0M1 = 0x00; P0M0 = 0x00; //设置为准双向口P1M1 = 0x00; P1M0 = 0x00; //设置为准双向口P2M1 = 0x00; P2M0 = 0x00; //设置为准双向口P3M1 = 0x00; P3M0 = 0x00; //设置为准双向口P4M1 = 0x00; P4M0 = 0x00; //设置为准双向口P5M1 = 0x00; P5M0 = 0x00; //设置为准双向口P6M1 = 0x00; P6M0 = 0x00; //设置为准双向口P7M1 = 0x00; P7M0 = 0x00; //设置为准双向口P3M0 = 0x00;P3M1 = 0x00;P3M0 &= ~0x03;P3M1 |= 0x03;//设置USB使用的时钟源IRC48MCR = 0x80; //使能内部48M高速IRCwhile (!(IRC48MCR & 0x01)); //等待时钟稳定USBCLK = 0x00; //使用CDC功能需要使用这两行,HID功能禁用这两行。USBCON = 0x90;
}void delay_ms(u16 ms) //unsigned int
{u16 i;do{i = MAIN_Fosc/6000;while(--i);}while(--ms);
}void Timer0_Isr(void) interrupt 1 //1ms进来执行一次,无需其他延时,重复赋值
{static timecount = 0;SEG_LED_Show(); //数码管刷新timecount++; //1ms+1if(timecount>=10) //如果这个变量大于等于10,说明10ms到达{timecount = 0;TIM_10MS_Flag = 1; //10ms到了}
}
编译下载,串口持续打印0,1。
根据原理图,可以按下按键改变adc的值。按下按键,得到的打印结果与原理图一致。
这里使用的源为高精度基准电压2.5V,默认焊接R79,如图:
也可以用万用表的电压档,测量ADC的实际基准电压,红正,黑接地。
表上显示2.498伏非常的稳定,这个就是基准电压源。
再测一下ADC的数值,测量R27的电阻边上,测量得到读数与原理图可以对照。
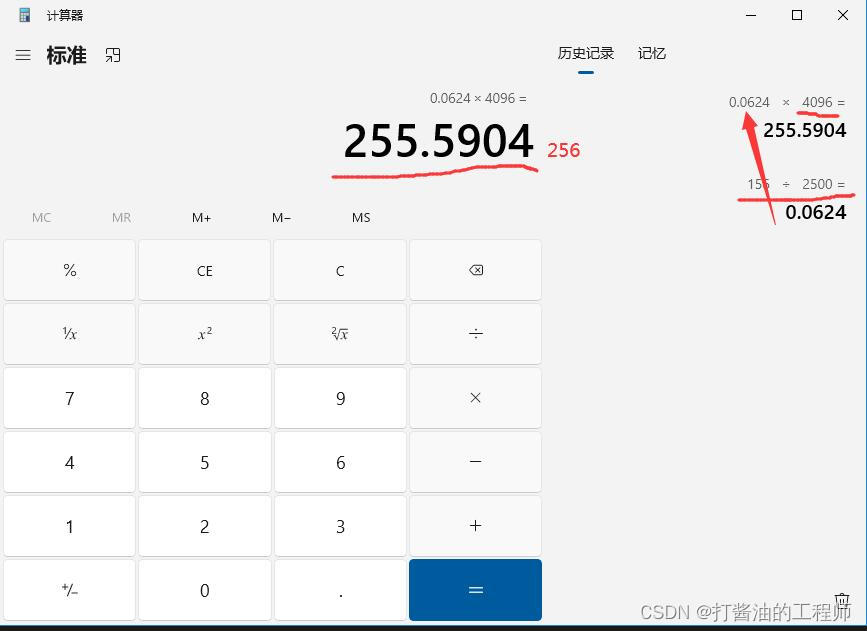
也可以用计算器来换算一下,看看电压是否正确:
可以根据这个反推出一个(引脚上的)电源电压。
增加函数:u16 ADC_CAL_Voltage(u16 num)
u16 ADC_CAL_Voltage(u16 num)
{return num*2.5*1000/4096;
}
将读取和打印代码移入延时代码段内,实现10ms检测打印1次:
if(TIM_10MS_Flag == 1) //将需要延时的代码部分放入{TIM_10MS_Flag = 0; //TIM_10MS_Flag 变量清空置位ADC_VAL = ADC_Read(0); //保存ADC的数值,使用P10,即取0printf("当前ADC数\xfd值:%d\t%d\r\n",(int)ADC_VAL,ADC_CAL_Voltage(ADC_VAL)); //打印ADC的数值,直接打印会出乱码,数后面需要加\XFD}}
编译,下载。不点击按钮时,显示0,按下按钮,显示256,156mv。
中断方式ADC的实现
只是多了一个EADC的这个操作:EADC=1;
我们如果需要在中断里面一直循环,那我们就一直开启。增加void ADC_Init(void)和void ADC_Isr() interrupt 5:
void ADC_Init(void) //ADC初始化
{P1M0 = 0x00; //设置P1.0引脚为高阻输入,参考点亮LED章节P1M1 = 0x01;ADCTIM= 0x3f; //设置ADC内部时序 0x3f=0011 1111ADCCFG= 0x2f; //设置ADC为数据右对齐。时钟为系统时钟/2/16/16 0x2f=0010 1111ADC_POWER = 1; //使能ADC模块EADC = 1; //开启中断模式
}void ADC_Isr() interrupt 5
{ADC_FLAG = 0; //此标志位必须软件清零,清空读取标志位adc_val = = (ADC_RES << 8) + ADC_RESL; //读取adc的数值,我们这边给它右对齐一下(最高4位恒定是0)ADC_START = 1; //开启ADC通道}3.编写最简单的ADC采集代码
这里有一个问题,ADC_Init查询模式和中断模式都进行了定义且同名,编译会出现错误。需要采用条件编译来规避。
HARDWARE\ADC\adc.c(75): error C53: redefinition of 'ADC_Init': function already defined
引入if预编译模板:
#define ADC_CHECK 0 //查询
#define ADC_Isr 1 //中断#define ADC_Func ADC_CHECK#if ADC_Func == ADC_CHECK
//adc查询的相关定义
#elif ADC_Func == ADC_Isr
//adc中断的相关定义
#else#endif
将模板插入adc.h,并修改:
#ifndef __ADC_H
#define __ADC_H#include "COMM/stc.h" //调用头文件
#include "COMM/usb.h"#define ADC_CHECK 0 //查询
#define ADC_Isr 1 //中断#define ADC_Func ADC_CHECK //最终选择#if ADC_Func == ADC_CHECK//adc查询的相关定义
#elif ADC_Func == ADC_Isr//adc中断的相关定义
#else#endif//------------------------引脚定义------------------------////------------------------变量声明------------------------//extern u16 adc_val; //中断获取到的ADC数值
//------------------------函数声明-----------------------//
void ADC_Init(void); //ADC初始化
u16 ADC_Read(u8 no ); //ADC读取指定通道的adc电压
u16 ADC_CAL_Voltage(u16 num);#endif
adc的这个数值非常重要,比如说报警的时候,假设我们检测外部有没有着火。
当这个adc的数值非常大(假设火越大,传感器出来的电压也越大),表示外面已经着火的时候,这个时候就要立马执行灭火,要不然的话,火势一起来就已经灭不掉火了
。
编译,下载。运行时,按下按钮没有反应。
排查:先跳转到初始化,发现ADC_Init跳转到了查询代码段,实际上要用的是中断的初始化,然后我们才可以进入。
需要把头文件中的查询换成中断:#define ADC_Func ADC_Isr //编译选择
修改后的代码如下:
adc.c:
#include "adc.h"
#include "intrins.h"u16 adc_val; //获取到的ADC数值#if ADC_Func == ADC_CHECK//adc查询的相关定义//========================================================================// 函数名称:ADC_Init// 函数功能:ADC初始化// 入口参数:无// 函数返回:无// 当前版本: VER1.0// 修改日期: 2023// 当前作者:// 其他备注://========================================================================void ADC_Init(void) //ADC初始化{P1M0 = 0x00; //设置P1.0引脚为高阻输入,参考点亮LED章节P1M1 = 0x01;ADCTIM= 0x3f; //设置ADC内部时序 0x3f=0011 1111ADCCFG= 0x2f; //设置ADC为数据右对齐。时钟为系统时钟/2/16/16 0x2f=0010 1111ADC_POWER = 1; //使能ADC模块}//========================================================================// 函数名称:ADC_Read// 函数功能:读取指定通道的adc电压// 入口参数: @no:通道0-15// 函数返回:当前的12位adc数值// 当前版本: VER1.0// 修改日期: 2023// 当前作者:// 其他备注://========================================================================u16 ADC_Read(u8 no) //读取指定通道的adc电压{u16 adcval; //adc数值保存变量ADC_CONTR &= 0xf0; //清空通道,要保持它的低4位为0ADC_CONTR |= no; //选择通道ADC_START = 1; //开启ADC通道_nop_();_nop_(); //空操作指令,比delay远远短while(!ADC_FLAG); //等待转换结束。ADC_FLAG:ADC转换结束标志位。当ADC完成一次转换后,硬件会自动将此位置1,并向CPU提出中断请求。ADC_FLAG = 0; //此标志位必须软件清零。adcval = (ADC_RES << 8) + ADC_RESL; //计算adc的数值,我们这边给它右对齐一下(最高4位恒定是0)return adcval;}#elif ADC_Func == ADC_Isr//adc中断的相关定义//========================================================================// 函数名称:ADC_Init// 函数功能:中断的ADC初始化// 入口参数:无// 函数返回:无// 当前版本: VER1.0// 修改日期: 2023// 当前作者:// 其他备注://========================================================================void ADC_Init(void) //ADC初始化{P1M0 = 0x00; //设置P1.0引脚为高阻输入,参考点亮LED章节P1M1 = 0x01;ADCTIM= 0x3f; //设置ADC内部时序 0x3f=0011 1111ADCCFG= 0x2f; //设置ADC为数据右对齐。时钟为系统时钟/2/16/16 0x2f=0010 1111ADC_POWER = 1; //使能ADC模块EADC = 1; //打开中断ADC_START = 1; //开启ADC通道}//========================================================================// 函数名称:ADC_iSR// 函数功能:// 入口参数: @// 函数返回:// 当前版本: VER1.0// 修改日期: 2023// 当前作者:// 其他备注://========================================================================void ADC_iSR()interrupt 5 //这里不能使用ADC_Isr(),会与预定义“#define ADC_Isr 1 //中断 ”混淆{ADC_FLAG = 0; //此标志位必须软件清零,清空读取标志位adc_val = (ADC_RES << 8) + ADC_RESL; //读取adc的数值,我们这边给它右对齐一下(最高4位恒定是0)ADC_START = 1; //开启ADC通道}#else#endif//========================================================================
// 函数名称:ADC_CAL_Voltage
// 函数功能:将ADC数值换算成电源电压
// 入口参数: @num:ADC的数值,取值范围0-4095
// 函数返回:电源电压 单位mv
// 当前版本: VER1.0
// 修改日期: 2023
// 当前作者:
// 其他备注:
//========================================================================
u16 ADC_CAL_Voltage(u16 num)
{return num*2.5*1000/4096;
}
adc.h:
#ifndef __ADC_H
#define __ADC_H#include "COMM/stc.h" //调用头文件
#include "COMM/usb.h"#define ADC_CHECK 0 //查询
#define ADC_Isr 1 //中断#define ADC_Func ADC_Isr //编译选择//------------------------引脚定义------------------------////------------------------变量声明------------------------//extern u16 adc_val; //中断获取到的ADC数值
//------------------------函数声明-----------------------//
void ADC_Init(void); //ADC初始化
u16 ADC_Read(u8 no); //ADC读取指定通道的adc电压
u16 ADC_CAL_Voltage(u16 num);#endif
demo.c:
#include "COMM/stc.h" //调用头文件
#include "COMM/usb.h"
#include "seg_led.h"
#include "key.h" //调用头文件
#include "beep.h"
#include "tim0.h"
#include "exit.h"
#include "adc.h"#define MAIN_Fosc 24000000UL //定义主时钟char *USER_DEVICEDESC = NULL;
char *USER_PRODUCTDESC = NULL;
char *USER_STCISPCMD = "@STCISP#";bit TIM_10MS_Flag; //10ms标志位void sys_init(); //函数声明
void delay_ms(u16 ms);void Timer0_Isr(void);u16 Time_CountDown = 0; //全局变量,文件里所有地方都可以调用 大于255定义u16void main() //程序开始运行的入口
{//u16 ADC_VAL; //ADC的数值sys_init(); //USB功能+IO口初始化usb_init(); //usb库初始化Timer0_Init(); //定时器0初始化ADC_Init();EA = 1; //CPU开放中断,打开总中断。while(1) //死循环{delay_ms(2); //让USB稳定下来
// if( DeviceState != DEVSTATE_CONFIGURED ) //
// continue;if( bUsbOutReady ){usb_OUT_done();}if(TIM_10MS_Flag == 1) //将需要延时的代码部分放入{TIM_10MS_Flag = 0; //TIM_10MS_Flag 变量清空置位//ADC_VAL = ADC_Read(0); //保存ADC的数值,使用P10,即取0printf("当前ADC数\xfd值:%d\t%dmv\r\n",(int)adc_val,ADC_CAL_Voltage(adc_val)); //打印ADC的数值,直接打印会出乱码,数后面需要加\XFD,单位mv}}
}void sys_init() //函数定义
{WTST = 0; //设置程序指令延时参数,赋值为0可将CPU执行指令的速度设置为最快EAXFR = 1; //扩展寄存器(XFR)访问使能CKCON = 0; //提高访问XRAM速度P0M1 = 0x00; P0M0 = 0x00; //设置为准双向口P1M1 = 0x00; P1M0 = 0x00; //设置为准双向口P2M1 = 0x00; P2M0 = 0x00; //设置为准双向口P3M1 = 0x00; P3M0 = 0x00; //设置为准双向口P4M1 = 0x00; P4M0 = 0x00; //设置为准双向口P5M1 = 0x00; P5M0 = 0x00; //设置为准双向口P6M1 = 0x00; P6M0 = 0x00; //设置为准双向口P7M1 = 0x00; P7M0 = 0x00; //设置为准双向口P3M0 = 0x00;P3M1 = 0x00;P3M0 &= ~0x03;P3M1 |= 0x03;//设置USB使用的时钟源IRC48MCR = 0x80; //使能内部48M高速IRCwhile (!(IRC48MCR & 0x01)); //等待时钟稳定USBCLK = 0x00; //使用CDC功能需要使用这两行,HID功能禁用这两行。USBCON = 0x90;
}void delay_ms(u16 ms) //unsigned int
{u16 i;do{i = MAIN_Fosc/6000;while(--i);}while(--ms);
}void Timer0_Isr(void) interrupt 1 //1ms进来执行一次,无需其他延时,重复赋值
{static timecount = 0;SEG_LED_Show(); //数码管刷新timecount++; //1ms+1if(timecount>=10) //如果这个变量大于等于10,说明10ms到达{timecount = 0;TIM_10MS_Flag = 1; //10ms到了}
}
总结
1.了解ADC的位数、引脚、基准电压、等关键名词。
2.学会ADC的原理,学会用法和电源的换算公式。
课后练习:
简易电压表:
1.用前4位数码管显示ADC的数值
2.用后四位数码管显示最终电压。
3.电压大于2.2V,蜂鸣长响,表示快要到达上限