目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
1.算法运行效果图预览
2.算法运行软件版本
matlab2022a
3.部分核心程序
...................................................................figure;
plot(P1x,P1y,'b^','Markersize',8);
hold on;
plot(P2x,P2y,'b^','Markersize',8);
hold on;
plot(P3x,P3y,'b^','Markersize',8);
hold on;
text(P1x+800,P1y+800,'BS1');
text(P2x+800,P2y+800,'BS2');
text(P3x+800,P3y+800,'BS3');
xlabel('X axis');
ylabel('Y axis');
axis([-3*LL/20,3*LL,-3*LL/20,3*LL]);
grid on;
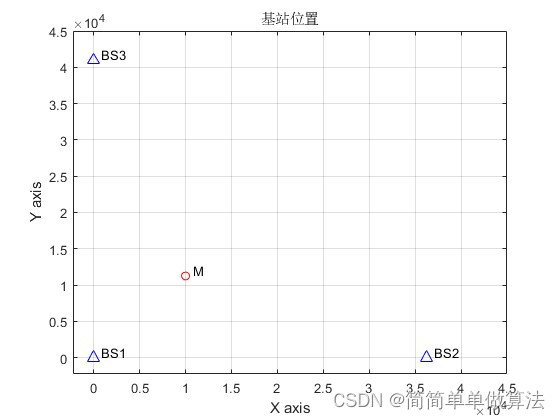
%这里随机生成移动物体的位置坐标
P0x = 2*LL/3;
P0y = 3*LL/4;
plot(P0x,P0y,'ro','Markersize',6);hold off;
text(P0x+800,P0y+800,'M');
title('基站位置');%定义发送信号,这里发送信号根据要求使用AM发送信号
fc = 1000; %载波频率
tau = 10^(-7);%时间间隔
T = 1/fc/2; %频率周期
t = -T*SL+tau:tau:T*SL;%信号的长度,这里使用8个周期进行
No = length(t); %信号的长度
A = 1;%发送信号的幅度
s = A*cos(2*pi*fc*t);
rng(1);%use matlab2013b else maybe error
%信道模拟
for j = 1:length(SNR)%加入噪声r2(1,:) = awgn(r(1,:),SNR(j));r2(2,:) = awgn(r(2,:),SNR(j));r2(3,:) = awgn(r(3,:),SNR(j));%加入多径 for jj = 1:Nsignals = r2(jj,:);if Mpd == 0signals2 = signals;elsesignals2 = signals + 0.65*[zeros(1,Mpd),signals(1:end-Mpd)]; endr3(jj,:) = signals2;end%计算延迟相关运算Peak = zeros(N,1);%定义相关峰的值delay_theory = zeros(N,1);%通过广义相关运算得到的延迟估计值for kk = 1:1:LL/10tau_theory = tau*kk;temp = r3(1,(No/2-kk+1):(No-kk))*tau;for i =2:Ndata = (sum(r3(i,No/2+1:No).*temp))^2;if Peak(i) < dataPeak(i) = data;delay_theory(i) = tau_theory;endendend%通过TDOA方法,根据理论估计延迟得到实际的坐标点位置R_theory = zeros(1,N);Kj = zeros(1,N);for i = 2:NR_theory(i) = delay_theory(i)*c;Kj(i) = BS(i,1)^2 + BS(i,2)^2;end
.................................................................clear xyChan R1 cs bs as Q_tdoa K_tdoa D_tdoa C_tdoa H_tdoa Kj R_theory delay_theory Peak tau_theory temp
endfigure;
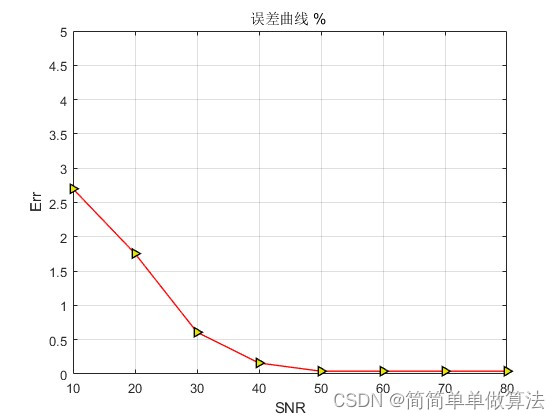
plot(SNR,Err,'-r>',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);
grid on;
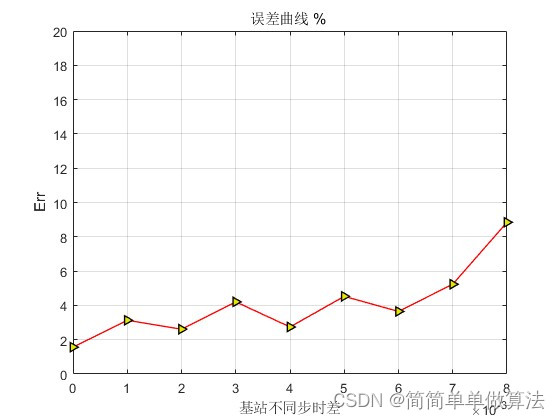
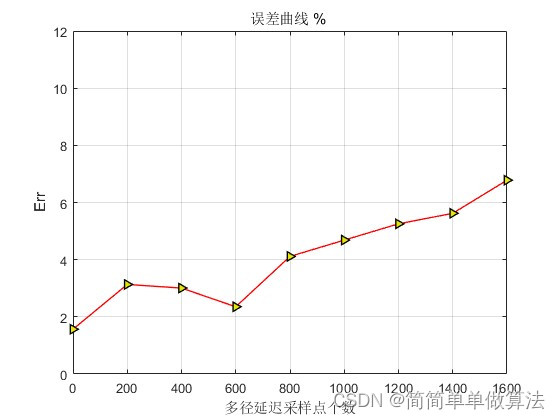
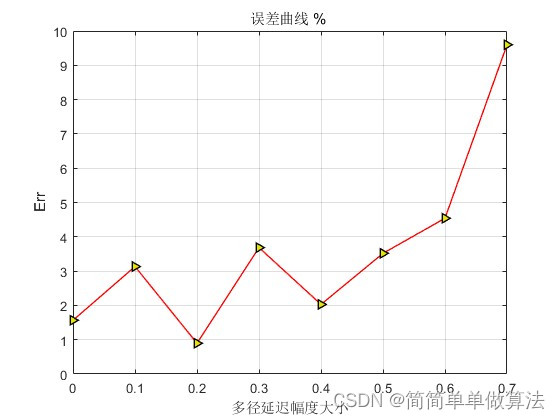
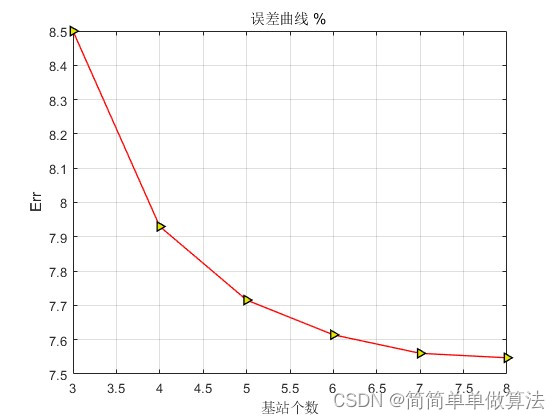
title('误差曲线 % ');
xlabel('SNR');
ylabel('Err');
axis([10,80,0,5]);%显示理论估计值
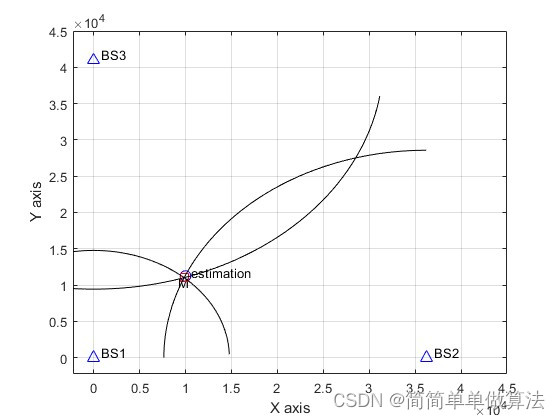
figure;
plot(P1x,P1y,'b^','Markersize',8);hold on;
plot(P2x,P2y,'b^','Markersize',8);hold on;
plot(P3x,P3y,'b^','Markersize',8);hold on;
axis([-3*LL/20,3*LL,-3*LL/20,3*LL]);
grid on;
xlabel('X axis');
ylabel('Y axis');
text(P1x+800,P1y+800,'BS1');
text(P2x+800,P2y+800,'BS2');
text(P3x+800,P3y+800,'BS3');
plot(P0x,P0y,'bo','Markersize',8);
hold on;
text(P0x-800,P0y-800,'M');SEL = 1;plot(X_theory(SEL),Y_theory(SEL),'rs','Markersize',8);hold on;
text(X_theory(SEL)+800,Y_theory(SEL)+800,'estimation');R1 = sqrt((X_theory(SEL)-P1x)^2+(Y_theory(SEL)-P1y)^2);
R2 = sqrt((X_theory(SEL)-P2x)^2+(Y_theory(SEL)-P2y)^2);
R3 = sqrt((X_theory(SEL)-P3x)^2+(Y_theory(SEL)-P3y)^2);alpha=0.01*pi:pi/100:0.55*pi;
x1= P1x+R1*cos(alpha);
y1= P1y+R1*sin(alpha);
hold on;
plot(x1,y1,'k-'); alpha=0.5*pi:pi/100:1.0*pi;
x2= P2x+R2*cos(alpha);
y2= P2y+R2*sin(alpha);
hold on;
plot(x2,y2,'k-'); alpha=1.1*pi:pi/100:1.95*pi;
x3= P3x+R3*cos(alpha);
y3= P3y+R3*sin(alpha);
hold on;
plot(x3,y3,'k-');
36_005m4.算法理论概述
无线定位中的TDOA(Time Difference of Arrival)时延估计算法是一种基于信号到达时间差的定位技术。它的基本原理是,通过测量信号从发射点到接收点的传播时间差,可以计算出发射点和接收点之间的距离差,从而确定发射点的位置。
TDOA定位系统通常由多个接收器和一个发射器组成。发射器发送信号,接收器接收到信号后,测量信号的到达时间,并将时间信息发送回发射器。发射器根据接收器的时间测量值,计算出每个接收器与发射器之间的距离差,并根据距离差确定发射器的位置。
TDOA定位系统的数学公式可以表示为:
Δt = (d/c) * ΔT
其中,Δt是信号到达时间差,d是发射器与接收器之间的距离,c是信号传播速度,ΔT是信号发送和接收之间的时间间隔。通过测量Δt,可以计算出d,从而确定发射器的位置。
在实际应用中,TDOA定位系统通常采用多个接收器同时接收信号,并测量信号的到达时间。通过多点测量结果,可以计算出多个距离差,并利用多个距离差确定发射器的位置。这种算法通常采用最小二乘法、多边形法等数学方法进行求解。
需要注意的是,TDOA定位系统需要高精度的计时设备和同步信号源,以保证测量结果的准确性。此外,信号传播路径上的建筑物、地形、气象条件等也会对测量结果造成影响,需要进行误差修正和处理。
总之,TDOA时延估计算法是一种基于信号到达时间差的无线定位技术,其基本原理是通过测量信号传播时间差来计算发射器与接收器之间的距离差,从而确定发射器的位置。在实际应用中,需要高精度的计时设备和同步信号源,并考虑多种因素对测量结果的影响。
5.算法完整程序工程
OOOOO
OOO
O