KUKA机器人通过3点法设置工作台基坐标系的具体方法





本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/144961.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

华为云智能化组装式交付方案 ——金融级PaaS业务洞察及Web3实践的卓越贡献
伴随信息技术与金融业务加速的融合,企业应用服务平台(PaaS)已从幕后走向台前,成为推动行业数字化转型的关键力量。此背景下,华为云PaaS智能化组装式交付方案闪耀全场,在近日结束的华为全联接大会 2023上倍受…
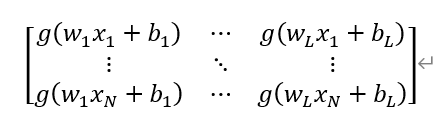
word中使用latex多行公式,矩阵公式
\eqarray{H& [h(x_1)^T,\cdots,h(x_N)^T]^T \\ & [\matrix{g(w_1 x_1b_1) & \cdots & g(w_L x_1b_L) \\ \vdots & \ddots & \vdots \\ g(w_1 x_Nb_1) & \cdots & g(w_L x_Nb_L)}]_{N \times L}}&的引起的那条竖线可以通过backspace或者del…

5、Linux驱动开发:设备-设备注册
目录
🍅点击这里查看所有博文 随着自己工作的进行,接触到的技术栈也越来越多。给我一个很直观的感受就是,某一项技术/经验在刚开始接触的时候都记得很清楚。往往过了几个月都会忘记的差不多了,只有经常会用到的东西才有可能真正记…
Kubernetes 上的数据已跨越鸿沟:在 GKE 上运行有状态应用程序的案例
Kubernetes 是当今云原生开发的事实上的标准。长期以来,Kubernetes 主要与无状态应用程序相关,例如 Web 和批处理应用程序。然而,与大多数事物一样,Kubernetes 也在不断发展。如今,我们看到 Kubernetes 上有状态应用程…

26967-2011 一般用喷油单螺杆空气压缩机
声明
本文是学习GB-T 26967-2011 一般用喷油单螺杆空气压缩机. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们
1 范围
本标准规定了一般用喷油单螺杆空气压缩机(以下简称"单螺杆空压机")的术语和定义、型号、基本
参数、要求、试验方法、…

华为OD七日集训第6期 十一特辑 - 按算法分类,由易到难,循序渐进,玩转OD
目录 专栏导读华为OD机试算法题太多了,知识点繁杂,如何刷题更有效率呢? 一、逻辑分析二、数据结构1、线性表① 数组② 双指针 2、map与list3、优先队列4、滑动窗口5、二叉树6、并查集7、栈 三、算法1、基础算法① 贪心算法② 二分查找③ 分治…
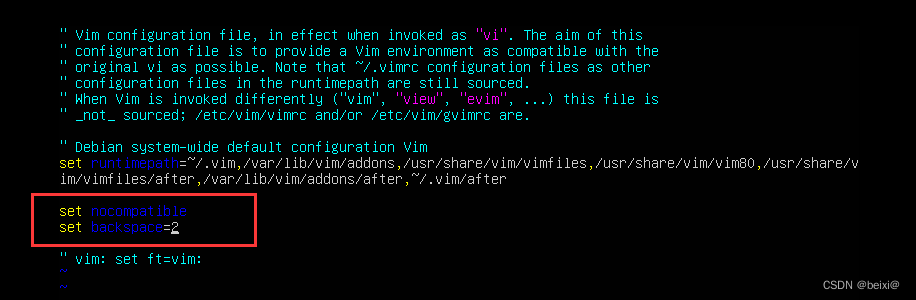
【Linux】完美解决ubuntu18.04下vi不能使用方向键和退格键
今天在刚安装完ubuntu18.04,发现在使用vi命令配置文件时使用方向键并不能移动光标,而是出现一堆奇怪的英文字母,使用退格键也不能正常地删除内容,用惯了CentOS的我已经感觉到ubuntu没有centos用着丝滑,但是没办法&…
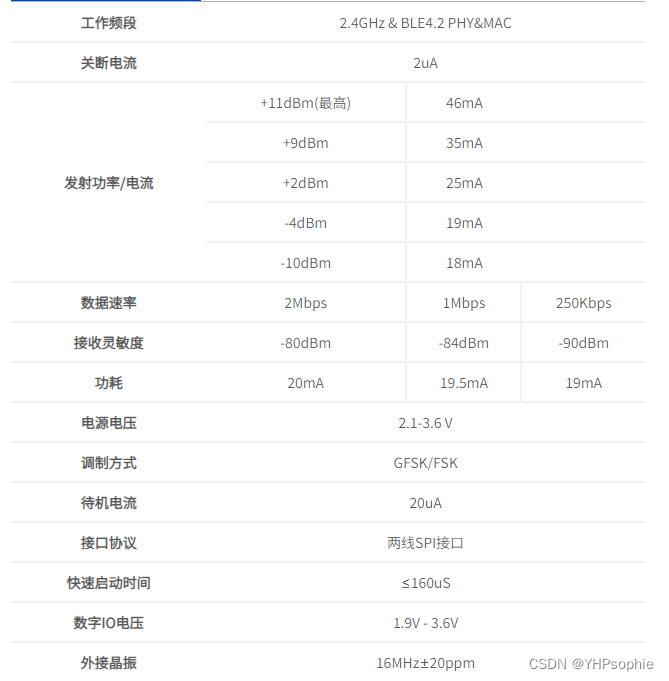
2.4g无线收发芯片:Ci24R1(DFN8)
Ci24R1 采用GFSK/FSK数字调制与解调技术。数据传输速率与PA输出功率都可以调节,支持2Mbps, 1Mbps, 250Kbps三种数据速率。高的数据速率可以在更短的时间完成同样的数据收发,因此可以具有更低的功耗。
Ci24R1 是一颗工作在2.4GHz ISM频段,专为…

2023 “华为杯” 中国研究生数学建模竞赛(F题)深度剖析|数学建模完整代码+建模过程全解全析
F题代码思路
当大家面临着复杂的数学建模问题时,你是否曾经感到茫然无措?作为2021年美国大学生数学建模比赛的O奖得主,我为大家提供了一套优秀的解题思路,让你轻松应对各种难题。 让我们一起看看研赛的F题呀!全文都已…
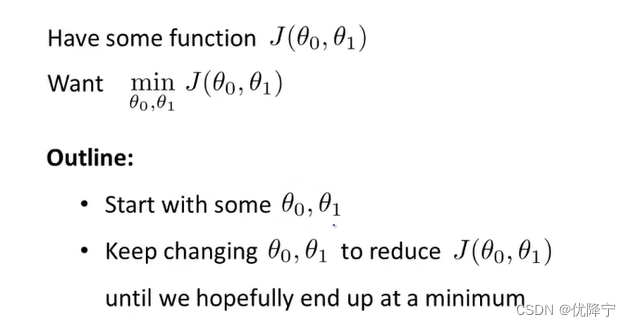
Machine Learning(study notes)
There is no studying without going crazy
Studying alwats drives us crazy 文章目录 DefineMachine LearningSupervised Learning(监督学习)Regression problemClassidication Unspervised LearningClustering StudyModel representation(…

025 - STM32学习笔记 - 液晶屏控制(二) - 代码实现
025- STM32学习笔记 - 液晶屏控制(二) - 代码实现
好久没更新学习笔记了,最近工作上的事情太多了,趁着国庆中秋,多更新一点看看。 上节学习了关于LTDC与DMA2D以及显示屏的相关知识点,这节开始实操…

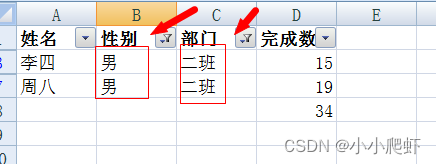
excel筛选后求和
需要对excel先筛选,后对“完成数量”进行求和。初始表格如下: 一、选中表内任意单元格,按ctrlshiftL,开启筛选 二、根据“部门”筛选,比如选择“一班” 筛选完毕后,选中上图单元格,然后按alt后&…
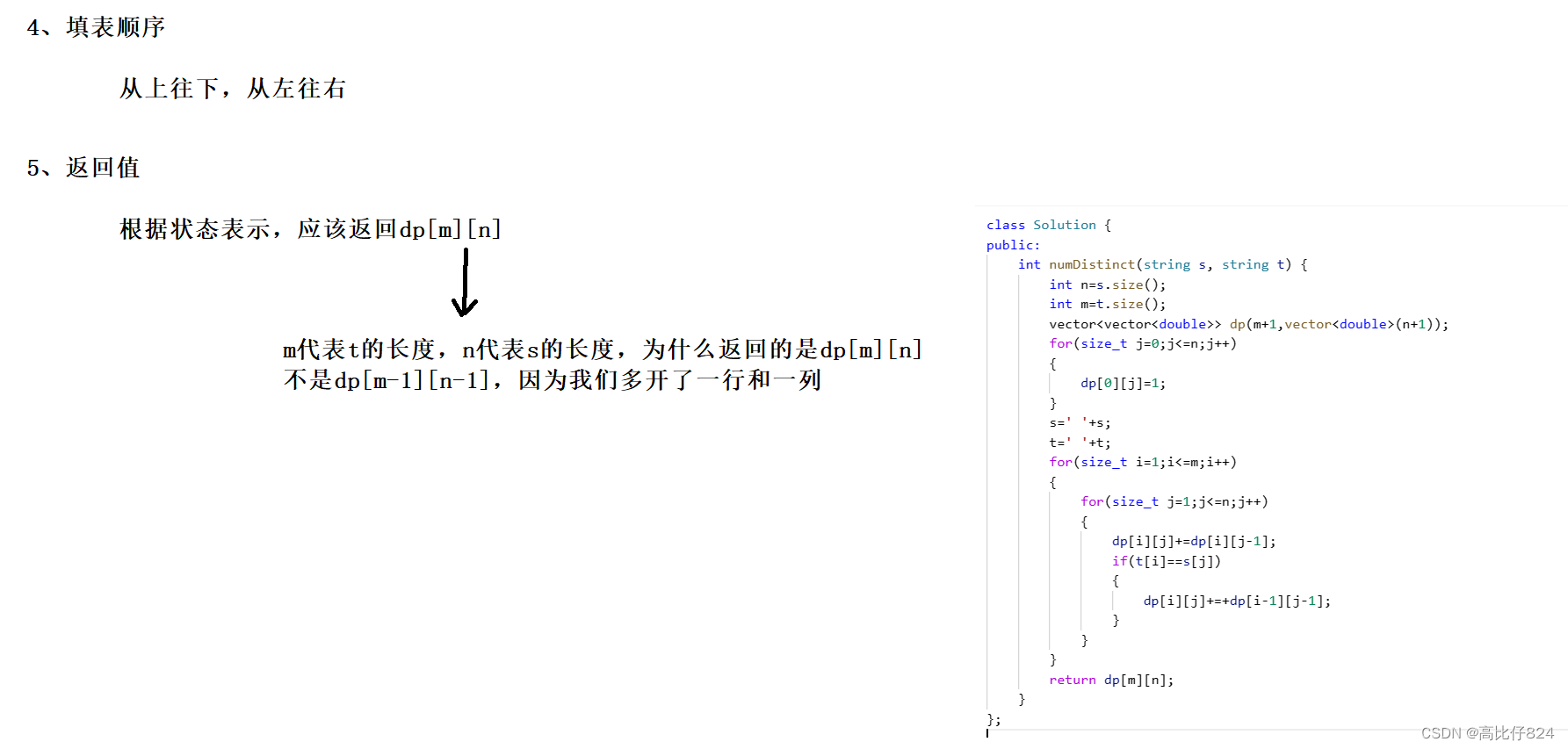
力扣 -- 115. 不同的子序列
解题步骤: 参考代码:
class Solution {
public:int numDistinct(string s, string t) {int ns.size();int mt.size();//多开一行,多开一列vector<vector<double>> dp(m1,vector<double>(n1));for(size_t j0;j<n;j){dp[…

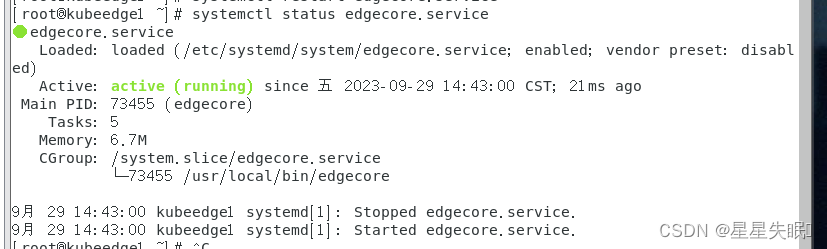
k8s+kubeedge+sedna安装的全套流程
一,环境准备
把两台虚拟机的ip地址设置成静态的IP地址,否则ip地址会变
虚拟机配置静态IP(NAT模式)_nat子网的准入_阿祖,收手吧的博客-CSDN博客
节点IP软件 云节点192.168.133.139kubernetescloudcore边…

【独家专访】“数网”同防筑牢屏障——新型电力系统网络安全保障体系需加快调整
随着全球数字化进程不断加快,在国际竞争和冲突中,网络战和数据战已然屡见不鲜。电力作为关系国计民生的关键行业,更成为网络攻击的重要对象。加强电力等关键信息基础设施的网络安全保障,是国家今后一段时期的重点工作。7月15日召开…
结构型设计模式——外观模式
摘要
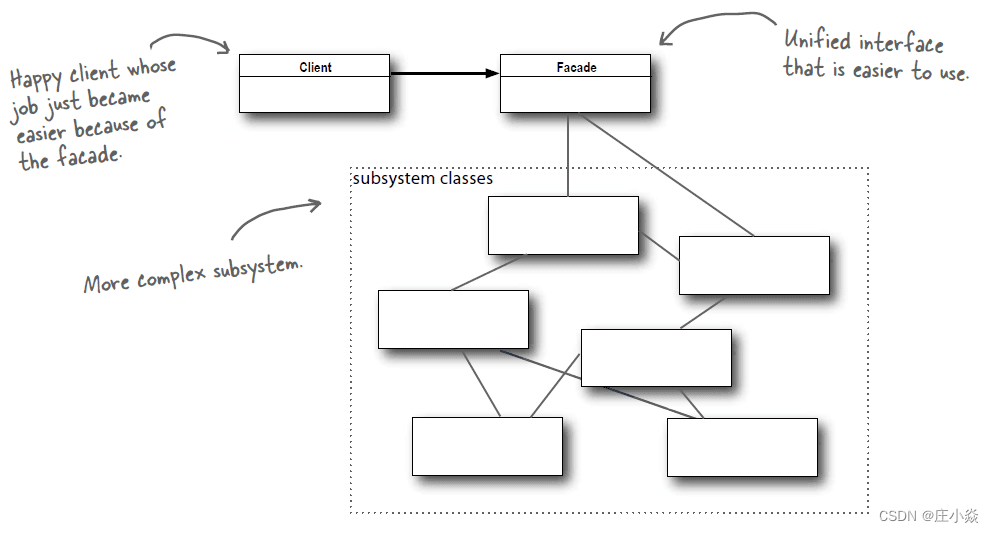
本文主要分析设计模式 - 结构型 - 外观(Facade),它提供了一个统一的接口,用来访问子系统中的一群接口,从而让子系统更容易使用。
一、外观模式的意图
提供了一个统一的接口,用来访问子系统中的一群接口,从而让…
26962-2011 高频电磁场综合水处理器技术条件
声明
本文是学习GB-T 26962-2011 高频电磁场综合水处理器技术条件. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们
1 范围
本标准规定了高频电磁场综合水处理器(以下简称处理器)的术语和定义、分类和型号、结构型式、
要求及检验、标志、包装和贮运…
PyQt/PySide ImportError: DLL load failed while importing Shiboken,PyQt库和python
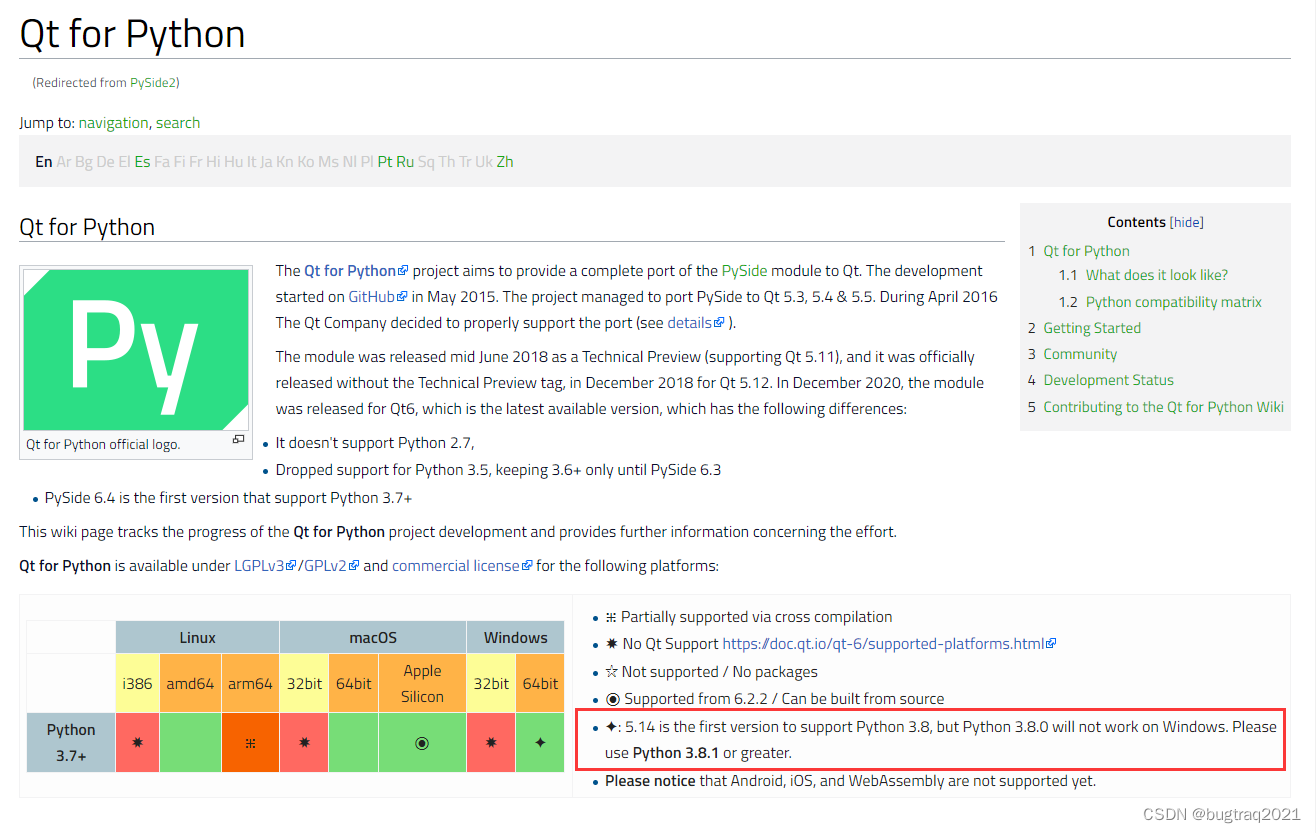
最近在测试PySide项目,在新环境下报错了:ImportError: DLL load failed while importing Shiboken: 找不到指定的程序。
Traceback (most recent call last):File "D:/xxx.py", line 10, in <module>from PySide6.QtWidgets import QAp…
最新文章
- 汕头网站模板/网站设计制作教程
- 网站开发项目比赛/google search
- 可以做蛋白三位结构图的网站/广州市疫情最新情况
- 网站浏览排名/基本seo技术在线咨询
- 中山建设网站首页/aso榜单优化
- 做网站 郑州公司哪家好/互联网行业最新资讯
- 【信息系统项目管理师】高分论文:论信息系统项目的成本管理(车站设备智能化管理平台)
- windows安装Elasticsearch及增删改查操作
- 在 Go 中利用 ffmpeg 进行视频和音频处理
- aws(学习笔记第十九课) 使用ECS和Fargate进行容器开发
- 电脑使用CDR时弹出错误“计算机丢失mfc140u.dll”是什么原因?“计算机丢失mfc140u.dll”要怎么解决?
- Set集合进行!contains判断IDEA提示Unnecessary ‘contains()‘ check
推荐文章
- ️ Vulnhuntr:利用大型语言模型(LLM)进行零样本漏洞发现的工具
- 普通人需要学Python吗?能学会吗?
- # ABAP SQL 字符串处理
- #compsoer基本使用01#
- #include <iostream>介绍
- #商业地产写字楼出租数据分析# 数据采集# #数据治理# 2024年3月 北上广深成渝对比情况:
- (14)D-FINE网络,爆锤yolo系列
- (2)(2.11) RFD900
- (2)双指针练习:复写零
- (24)(24.3) MSP OSD(二)
- (css)element-ui表格行图片点击放大且可调整preview-src-list大图预览样式
- (Git)git clone报错——SSL certificate problem: self signed certificate