1.自动泊车的硬件架构
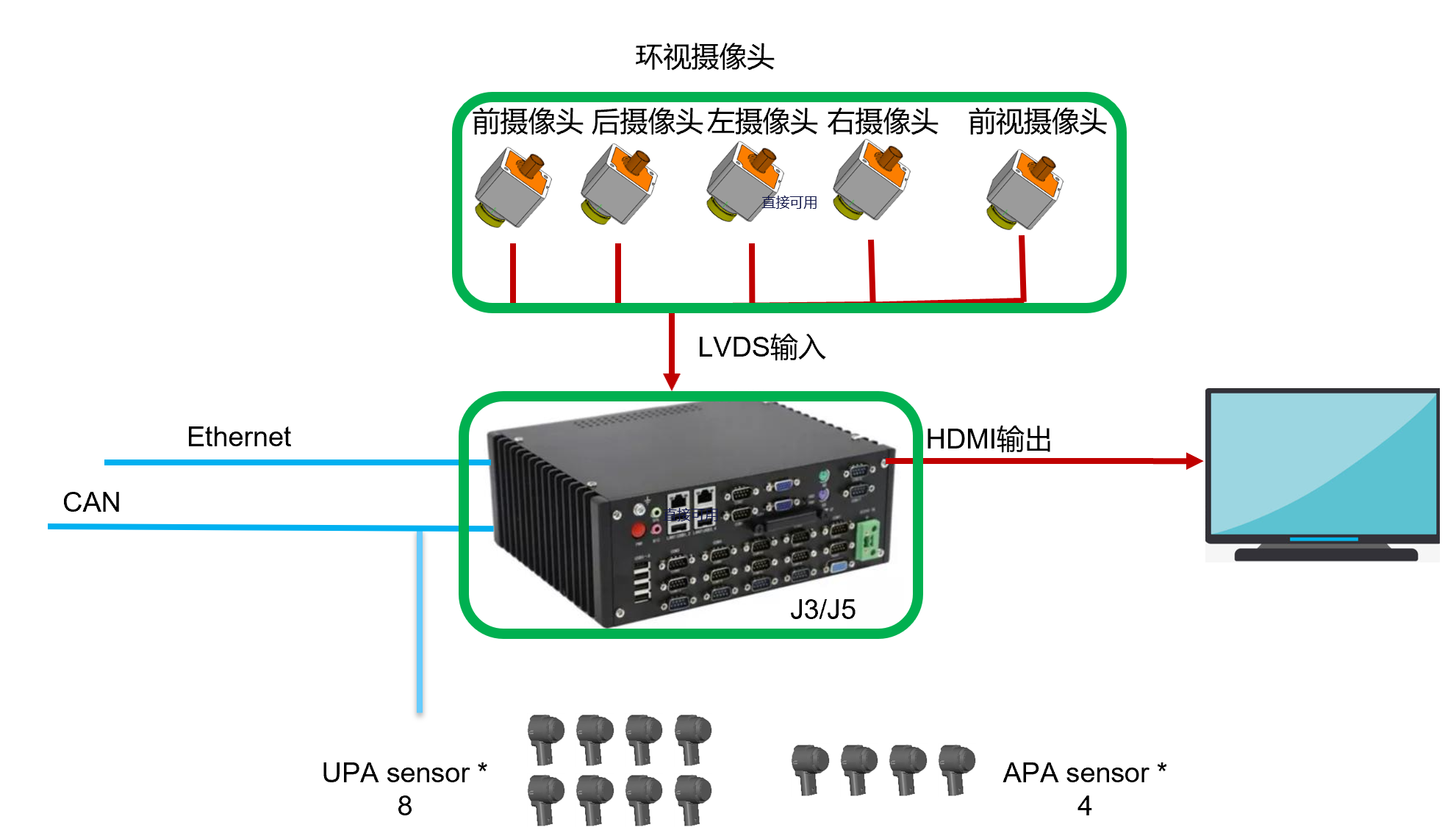
2.APA自动泊车辅助系统
1)APA主要包括以下典型功能
(1)泊车入库:利用超声波雷达或环视摄像头实现车位识别,并计算出合适行驶轨迹,对车辆进行横向/纵向控制使车辆驶入车位;
(2)泊车出库:若车辆使用自动泊车功能入库,则可自动泊车出库功能;
(3)钥匙召唤功能:通过钥匙控制车辆向前或向后直行。
(4)低速预警功能:当探测到车辆周围有障碍物时,通过图像或声音的方式对驾驶员进行预警。
2)车位类型
根据划分标准的不同,车位类型存在不同的划分方法。
根据探测传感器的不同,车位可划分 超声波车位和视觉车位。超声波车位指有2辆车(或其他障碍物)构成的空间车位;视觉车位则指地上划线的车位。
根据停车姿态的不同,车位可划分为平行车位、垂直车位、斜列车位(前斜(不支持),后斜)。
3)实现方式
(1)超声波传感器探测车位
利用车辆自带的超声波传感器,探测出适合的停车空间,然后车辆会自动接管方向盘来控制方向,将车辆停入车位。
(2)摄像头识别车位
视觉车位的识别主要依靠车位线与地面的颜色不同来实现的,当对比度较低时,车位线无法识别。
(3)超声波视觉融合车位
超声波视觉融合车位对于视觉车位两侧或一侧有障碍物的情况,系统会根据障碍物与车位线的距离对泊车姿态进行调整。
3.APA相关主要说明
3.1自主泊车AP(Autonomous Parking)
指车辆自动驾驶从停车场入口开到停车位完成泊车,或从停车位驶出到停车场出口的功能。一般分为三个阶段:
1)记忆泊车VPA(Valet Parking assistance)
在驾驶员监控下,对于常用车位的,基于自学习停车场地图的停车场自动入库/出库功能;可延伸为一定距离范围内的增强遥控泊车。
2) 自动找车位泊车 ASP (Autonomous Searching Parking)
在驾驶员监控下,基于自建停车场地图/第三方地图的自动寻找车位泊车功能。提供多条搜索路径供用户选择;可延伸为充电车位的指定车位泊车(需网络接入空闲充电车位信息)。
3)自主代客泊车AVP (Autonomous Valet Parking)
无需驾驶员监控,基于第三方智慧停车场(提供地图、实时空闲车位、实时监控),用户可用手机激活的代客泊车/召唤功能,可以泊入指定车位或自动寻找车位泊入。
3.2其他
APA: Autonomous Parking assistance
IPA: Intelligent Parking assistance
RPA: Remote Parking assistance

![[React] 性能优化相关 (一)](https://img-blog.csdnimg.cn/715adda780f14b599d911c4465ead2b5.png)






![[Linux] 6.VMware虚拟机网络配置](https://img-blog.csdnimg.cn/071fe76fdb9b42309ac0794c657573e0.png)