一、简述
人们在打造自动驾驶汽车时首先想到的就是实现车道检测。这是 Tesla 和 mobileye 所说的“强制性”任务,也是 Sebastian Thrun(自动驾驶汽车教父)在接受采访时所说的首要任务。
这个方向有很多传统的 OpenCV 算法,这些算法由不再使用的非常旧的函数组成。目前全部都转到深度学习的方式了。
二、车道线检测的分割方法
1、LaneNet
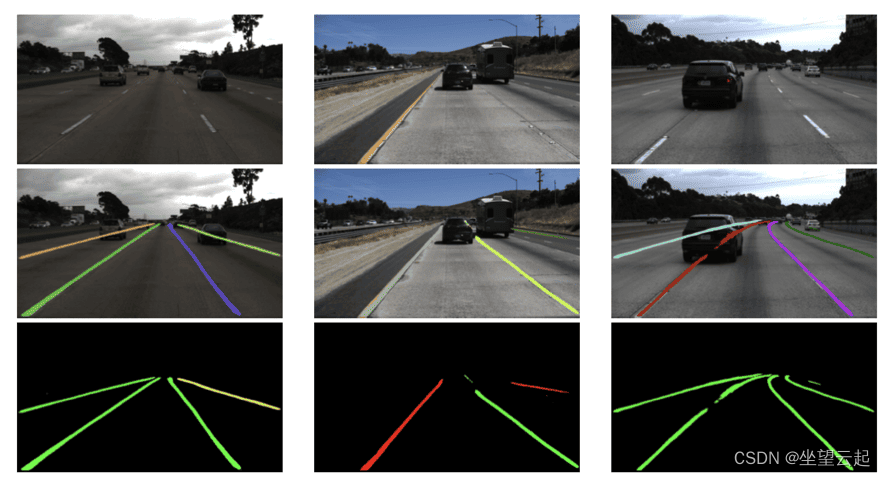
检测车道线的第一种也是最流行的方法是使用图像分割,它很重要,而且因为算法名称 LaneNet 被认为是实现这一目标的最佳方法。输入和输出都是图像。输出图像是一个带有车道标记的分割掩模,如下图底部所示:
大多数用于执行分割的模型都是编码器-解码器架构,并且根据数据集和标签,您将拥有更多或更少的类。您的任务是进行逐像素实例分类(对每个像素进行分类)。
该类别中最流行的架构之一(甚至可能在车道线检测中)是 LaneNet。因此,我将深入研究 LaneNet,然后探索其他一些模型。