本实验学习了通过spi通信协议,驱动flash;完成连续写操作。
连续写:
本质上还是页编程指令,两种连续写的方式:
1,每次只写1byte的数据。
2,每次写满1页数据,计算剩余数据够不够写满1页,并计算地址。
本实验采取方案一。
模块框图:

状态机:

时序图:

代码:
只放spi模块。
module spi (input wire sys_clk ,input wire sys_rst_n ,input wire key_flag ,input wire miso ,output reg cs_n ,output reg sck ,output reg mosi ,output reg po_flag ,output wire [7:0] po_data
);// localparam define 一般状态机的状态定义用局部参数就可以。localparam IDLE = 4'b0001 ,INSTRUCT = 4'b0010 ,READ = 4'b0100 ,SEND = 4'b1000 ;// parameter define 指令,计数器最大值,用全局参数定义。parameter COMD_REA = 8'h03 , // comd_readADDR_SEC = 8'h00 , // address_secter 扇区地址ADDR_PAG = 8'h00 , // address_page 页地址(行地址)ADDR_BYT = 8'hc8 , // assress_byte 字节地址NUM_COMD = 4'd4 ; // 用来记录在指令状态传递指令和地址byte数量parameter CNT_MAX_BYTE = 11'd260 , // 4 + 要读出的数据。例如: 4 + 256CNT_MAX_SEND = 20'd53000 ;// reg signal define reg [3:0] state_c ;reg [3:0] state_n ;reg cnt_20_ns ;reg [2:0] cnt_bit ;reg [10:0] cnt_byte ;reg flag_b ; // flag_bytereg flagBreg ;reg flag_R_S ; // flag_bytereg flag_RSr ;reg [7:0] datInFifo ; // data_in_fiforeg flag_data ; // flag_data 采样标志信号reg flaInFifo ; // flag_in_fiforeg [19:0] cnt_send ; // uart_tx模块发送1byte数据的等待时间。reg flaSenEnd ; // 计数器cnt_send计数到CNT_MAX_SEND - 2 拉高一个时钟周期,reg flag_out_fifo_reg ;// wire signal definewire empty ;wire full ;wire flaOutFif ; // flag_out_fifo wire [9:0] usedw ; // fifo中存储的数据量 wire IDLEtoINSTRUCT ;wire INSTRUCTto_READ ;wire READtoSEND ;wire SENDtoIDLE ;
/**********************************************************************/// // reg signal describe /*******状态机采用三段式描述*******/// reg [3:0] state_c ;// reg [3:0] state_n ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) state_c <= IDLE ;else state_c <= state_n ;endalways @(*) begincase (state_c)IDLE : if(IDLEtoINSTRUCT)state_n <= INSTRUCT ;else state_n <= IDLE ;INSTRUCT : if(INSTRUCTto_READ)state_n <= READ ;else state_n <= INSTRUCT ;READ : if(READtoSEND)state_n <= SEND ;else state_n <= READ ;SEND : if(SENDtoIDLE)state_n <= IDLE ;else state_n <= SEND ;default: state_n <= IDLE ;endcaseendassign IDLEtoINSTRUCT = (state_c == IDLE ) && (key_flag) ;assign INSTRUCTto_READ = (state_c == INSTRUCT) && (flagBreg) ; // 指令的的最后1byte发送完毕assign READtoSEND = (state_c == READ ) && (flag_RSr) ; // 读完想要的最后1byteassign SENDtoIDLE = (state_c == SEND ) && (flaSenEnd && empty) ;// reg cnt_20_ns ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_20_ns <= 1'b0 ;else if(state_c == INSTRUCT || state_c == READ)cnt_20_ns <= cnt_20_ns + 1'b1 ;else if(state_c != INSTRUCT || state_c != READ)cnt_20_ns <= 1'b0 ;else cnt_20_ns <= 1'b0 ;end// reg [2:0] cnt_bit ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_bit <=3'd0 ;elsecase (state_c)IDLE : cnt_bit <=3'd0 ;INSTRUCT: if(!cnt_20_ns && sck && cnt_bit == 7) cnt_bit <= 3'd0 ;else if(!cnt_20_ns && sck)cnt_bit <= cnt_bit + 1'b1 ;READ : if(!cnt_20_ns && sck && cnt_bit == 7) cnt_bit <= 3'd0 ;else if(!cnt_20_ns && sck)cnt_bit <= cnt_bit + 1'b1 ;SEND : cnt_bit <=3'd0 ;default : cnt_bit <=3'd0 ; endcaseend// reg [10:0] cnt_byte ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_byte <= 4'd0 ;else if(cnt_bit == 7 && cnt_byte == CNT_MAX_BYTE - 1 && !cnt_20_ns && sck)cnt_byte <= 4'd0 ;else if(cnt_bit == 7 && !cnt_20_ns && sck)cnt_byte <= cnt_byte + 1'b1 ;else cnt_byte <= cnt_byte ;end// reg flag_R_S ;// reg flag_b ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;endelsecase (state_c)IDLE : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end INSTRUCT: begin if((cnt_byte == NUM_COMD - 1) && (cnt_bit == 7) && !cnt_20_ns && sck)flag_b <= 1'b1 ;else flag_b <= flag_b ;flag_R_S <= 1'b0 ;endREAD : beginif(cnt_byte == NUM_COMD)flag_R_S <= 1'b0 ;else if((cnt_byte == CNT_MAX_BYTE - 1) && (cnt_bit == 7) && !cnt_20_ns && sck)flag_R_S <= 1'b1 ;flag_b <= 1'b0 ;endSEND : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end default : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end endcase end// reg flagBreg ;// reg flag_RSr ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flagBreg <= 1'b0 ;else flagBreg <= flag_b ;endalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_RSr <= 1'b0 ;else flag_RSr <= flag_R_S ;end// reg [7:0] datInFifo ; // data_in_fifoalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) datInFifo <= 1'b0 ;else if(flag_data)datInFifo <= {datInFifo[6:0],miso}; // 读flash中数据,先传的低位{miso,datInFifo[7:1]}。else datInFifo <= datInFifo ;end// reg flag_data ; // flag_data 采样标志信号always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_data <= 1'b0 ;else if(state_c == READ) beginif(cnt_20_ns && !sck)flag_data <= 1'b1 ;else flag_data <= 1'b0 ;end else beginflag_data <= 1'b0 ;endend// reg flaInFifo ; // flag_in_fifoalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flaInFifo <= 1'b0 ;else if(state_c == READ && cnt_bit == 7 && flag_data)flaInFifo <= 1'b1 ;else flaInFifo <= 1'b0 ;end// reg [19:0] cnt_send ; // uart_tx模块发送1byte数据的等待时间。always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) cnt_send <= 20'd0 ;else if(state_c == SEND) beginif(cnt_send == CNT_MAX_SEND - 1) cnt_send <= 20'd0 ;else cnt_send <= cnt_send + 1'b1 ;endelse cnt_send <= 20'd0 ;end// reg flag_out_fifo_reg ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_out_fifo_reg <= 1'b0 ;else if(flaSenEnd && !empty)flag_out_fifo_reg <= 1'b1 ;else flag_out_fifo_reg <= 1'b0 ;end// reg flaSenEnd ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) flaSenEnd <= 1'b0 ;else if(cnt_send == CNT_MAX_SEND - 2)flaSenEnd <= 1'b1 ;else flaSenEnd <= 1'b0 ;end// output signal describe// cs_n ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cs_n <= 1'b1 ;else case (state_c)IDLE : if(key_flag)cs_n <= 1'b0 ;else cs_n <= cs_n ;INSTRUCT: cs_n <= cs_n ;READ : cs_n <= cs_n ;SEND : cs_n <= 1'b1 ;default : cs_n <= 1'b1 ;endcaseend// sck ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) sck <= 1'b0 ;else case (state_c)IDLE : sck <= 1'b0 ; INSTRUCT: if(cnt_20_ns)sck <= ~sck ;else sck <= sck ;READ : if(cnt_20_ns)sck <= ~sck ;else sck <= sck ;SEND : sck <= 1'b0 ; default : sck <= 1'b0 ; endcaseend// mosi ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginmosi <= 1'b0 ;end else begincase (state_c)IDLE : mosi <= 1'b0 ;INSTRUCT: case (cnt_byte)0 : if(cnt_bit == 0)mosi <= COMD_REA[7] ;else if(cnt_20_ns && sck)mosi <= COMD_REA[7 - cnt_bit] ;else mosi <= mosi ;1 : if(cnt_bit == 0)mosi <= ADDR_SEC[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_SEC[7 - cnt_bit] ;else mosi <= mosi ;2 : if(cnt_bit == 0)mosi <= ADDR_PAG[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_PAG[7 - cnt_bit] ;else mosi <= mosi ;3 : if(cnt_bit == 0)mosi <= ADDR_BYT[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_BYT[7 - cnt_bit] ;else mosi <= mosi ;default : mosi <= 1'b0 ;endcaseREAD : mosi <= 1'b0 ;SEND : mosi <= 1'b0 ;default : mosi <= 1'b0 ;endcaseendend// po_flag ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)po_flag <= 1'b0 ;else po_flag <= flag_out_fifo_reg ;end// wire [7:0] po_data ;// 直接连接到fifo的输出端口。 // */
/***********************例化FIFO***************************************/assign flaOutFif = flag_out_fifo_reg ;
fifo_1024x8 fifo_1024x8_inst(.clock ( sys_clk ) ,.data ( datInFifo ) ,.rdreq ( flaOutFif ) ,.wrreq ( flaInFifo ) ,.empty ( empty ) ,.full ( full ) ,.q ( po_data ) ,.usedw ( usedw )
);endmodule仿真波形:
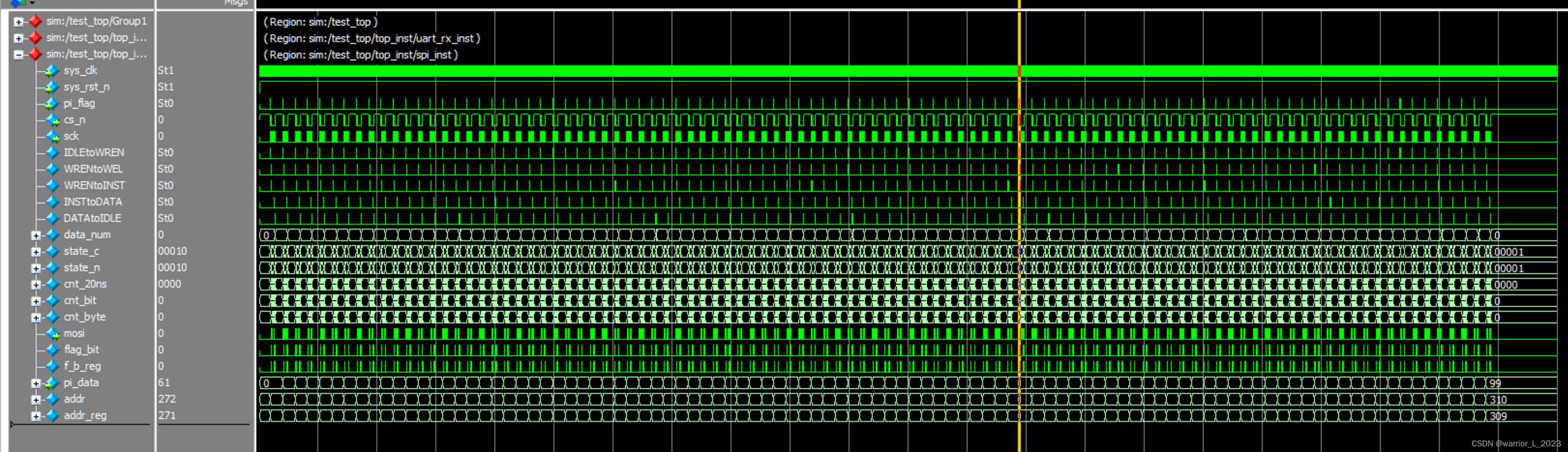
上版验证成功。