起飞前检查
- 电机响应是否正确(转向)
- 姿态响应是否正常(roll pitch yaw)
- GPS数据是否正常(星数,RTK信号)
- 电源电压
- 安全开关
- 安全检测(armed pre check)
起飞前的必调参数
-
机架类型;
-
加速度计校正,磁罗盘,遥控器校准
-
故障保护
-
BRD_SAFETY_DEFLT = 0,1 关闭或开启安全开关
-
飞行模式 FLTMODE_CH=5,默认选第5通道
-
急停 RCx_OPTION = 32或31
-
飞行控制 RCMAP_x
-
根据桨叶尺寸配置拉力曲线形变系数 MOT_THST_EXPO

-
电机参数,电调参数
1)MOT_PWM_MAX: 2000
2)MOT_PWM_MIN: 1000
3)MOT_SPIN_ARM: 0.1 空转油门
4)MOT_SPIN_MAX: 0.95
5)MOT_SPIN_MIN: 0.15 最小油门(要大于空转油门)
6)MOT_THST_HOVER: 悬停油门,取默认值,将悬停油门学习打开 -
AHRS和EKF3
1)AHRS_EKF_TYPE = 3
2)EK3_ENABLE = 1 -
RTK GPS 设置
-
电源监视 设置
-
图数传(MK32天空端) 设置
-
S1雷达 设置
-
最大倾角
ANGLE_MAX=1000~8000 centidegrees -
悬停油门学习
MOT_HOVER_LEARN: 2 learn and save ,悬停油门学习,悬停30s以上。 -
IMU低通滤波器参数
据桨叶尺寸来设置剪切频率:80Hz for 5 inch props, 40Hz for 10 inch props, 20Hz for 20 inch props (or larger)
1)INS_ACCEL_FILTER = 20
2)INS_GYRO_FILTER = 20 -
roll pitch yaw 角加速度限幅
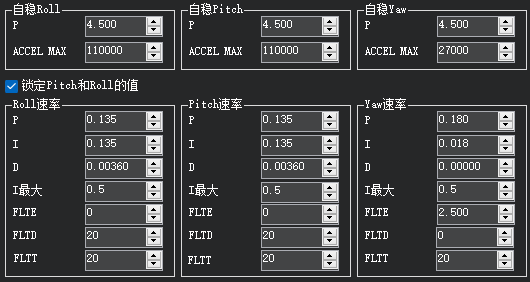
1)ATC_ACCEL_P_MAX
pitch通道最大角加速度
110000 for 10 inch props, 50000 for 20 inch props, 20000 for 30 inch
2)ATC_ACCEL_R_MAX
110000 for 10 inch props, 50000 for 20 inch props, 20000 for 30 inch props
3)ATC_ACCEL_Y_MAX
27000 for 10 inch props, 18000 for 20 inch props, 9000 for 30 inch props

-
控制量滤波参数
1)ATC_RAT_PIT_FLTD: INS_GYRO_FILTER / 2
Pitch axis rate controller derivative frequency in Hz
2)ATC_RAT_PIT_FLTT: INS_GYRO_FILTER / 2
Pitch axis rate controller target frequency in Hz
3)ATC_RAT_RLL_FLTD: INS_GYRO_FILTER / 2
4)ATC_RAT_RLL_FLTT: INS_GYRO_FILTER / 2
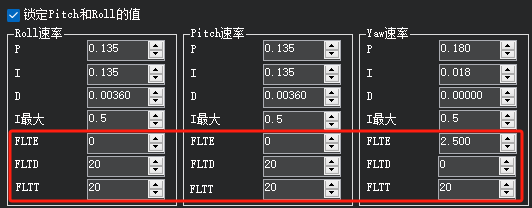
5)ATC_RAT_YAW_FLTE: 2
Yaw axis rate controller error frequency in Hz
6)ATC_RAT_YAW_FLTT: INS_GYRO_FILTER / 2
Yaw axis rate controller target frequency in Hz
-
打开陷波滤波采样功能(用于后续设置陷波滤波器)
1)INS_LOG_BAT_OPT 滤波前后的采样选项
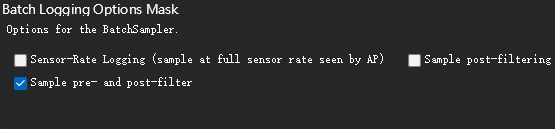
2)INS_LOG_BAT_MASK 采样源

注意:保证有SD卡,保持飞行或悬停至少30 second;
飞行中
- 高度源
- 偏航源
- RTK
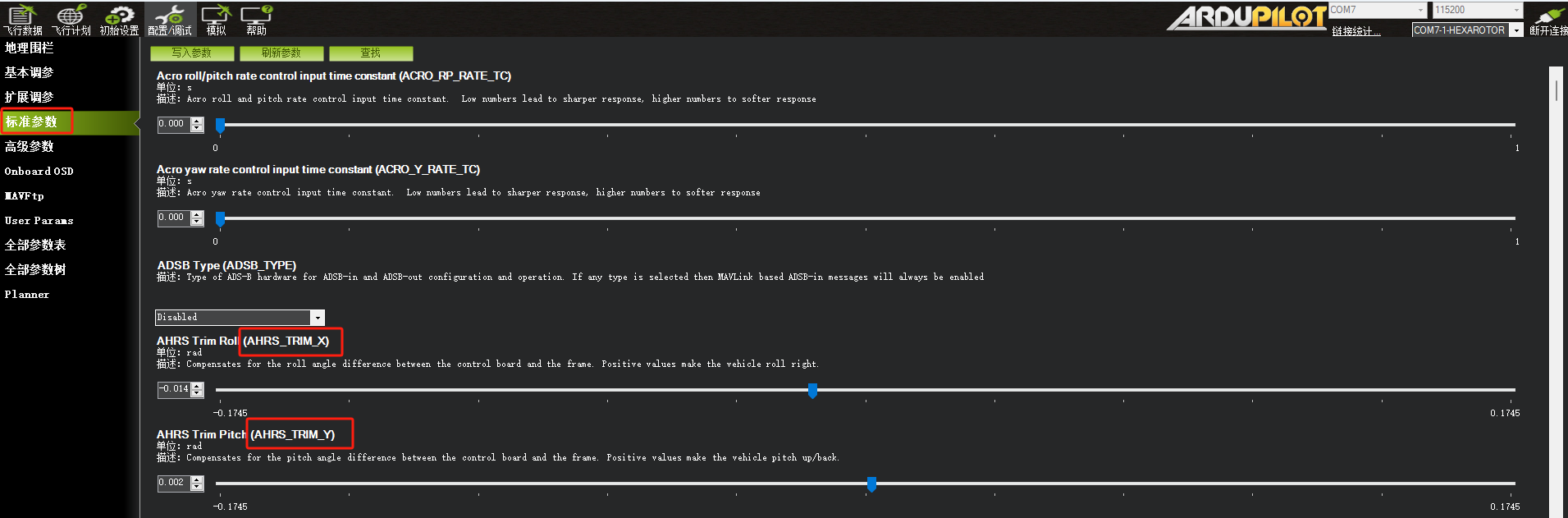
千寻账号稳定一些 - 配平
自稳模式下,飞机如果漂移得很厉害,则手动微调 AHRS_TRIM_X 和 AHRS_TRIM_Y 的值。
- PID参数
自稳模式
1)最大倾角
ANGLE_MAX=1000~8000 centidegrees
2)角度环,角速度环PID
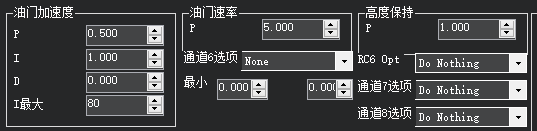
定高模式
1)上升下降最大速率
PILOT_SPEED_UP
PILOT_SPEED_DN
2)油门中位值死区
THR_DZ 默认
3)高度通道串级PID
注意:Throttle Accel PID 的参数,要保持I是P的两倍;
定点模式
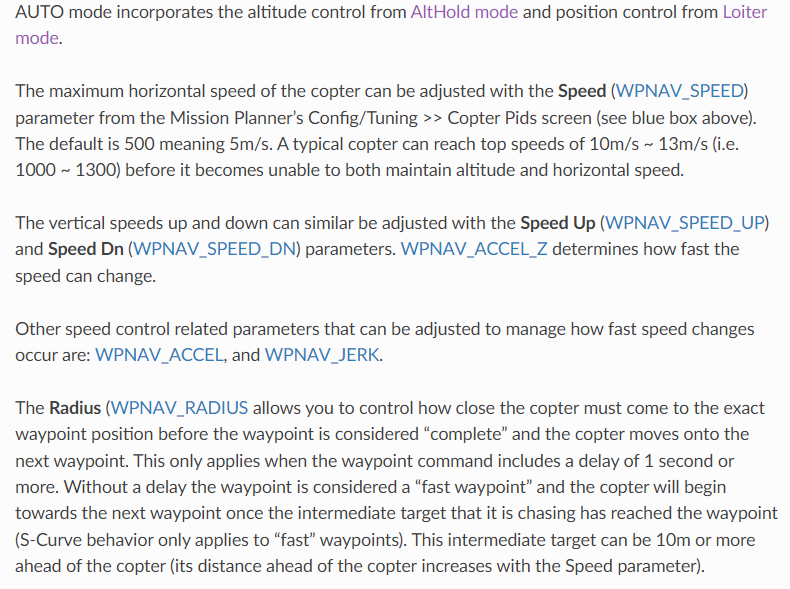
1)位置环速度环PID,水平速度限值
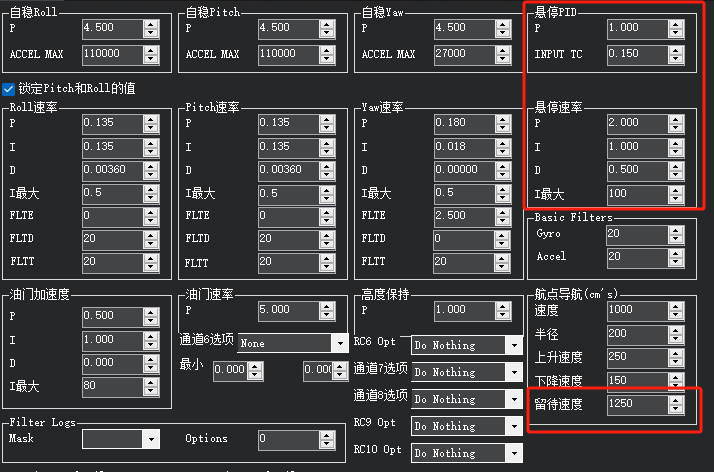
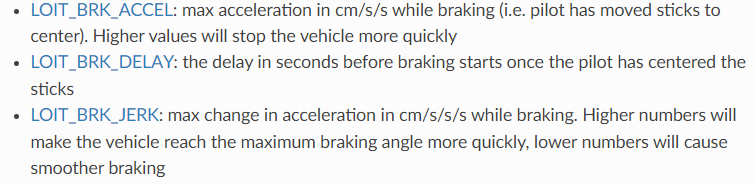
2)刹车参数
3)最大角度

4)最大水平加速度

自动任务模式

其他参数:
起飞后
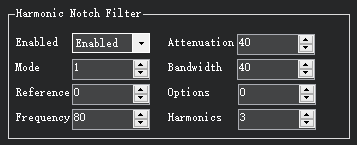
- 设置陷波滤波器参数
1)INS_HNTCH_MODE = 1 设置模式为Throttle Based Dynamic Notch
2)INS_HNTCH_ENABLE = 1 开启陷波滤波器
3)INS_HNTCH_REF = hover_thrust
频率的放大系数,这个参数决定了陷波频率随着油门变化而变化的程度;mode为1时一般将其设置为0;设为0时为静态陷波滤波器;mode不同该参数的设法不同,请参考文档;hover_thrust即悬停油门!!
4)INS_HNTCH_FREQ 陷波滤波器的中心频率,即设置为要滤除的频率;
5)INS_HNTCH_BW 陷波滤波器的带宽,一般设置为INS_HNTCH_FREQ / 2
6)INS_HNTCH_FM_RAT 保持默认值;
7)INS_HNTCH_HMNCS 要滤除的谐波,以INS_HNTCH_FREQ 为基波;例如INS_HNTCH_HMNCS设为3,则要滤除的信号包括:基波、1次2次3次4次谐波??保持默认值;
遥控器映射说明
- 自稳模式
roll杆:roll期望角;
pitch杆:pitch期望角;
yaw杆:偏航角速度期望值;
油门杆:控制电机的转速; - 定高模式
roll杆:roll期望角;
pitch杆:pitch期望角;
yaw杆:偏航角速度期望值;
油门杆:上升/下降的期望速度,上下限可以在 PILOT_SPEED_UP、PILOT_SPEED_DN 中配置;
什么时候上升?什么时候下降?
当油门杆超过中位值的 deadband (或称deadzone)区域时飞机上升,反之则下降,deadband 一般设置为油门杆 40% ~ 60%位置,根据自稳模式下飞机悬停时候的油门pwm位置而定,由THR_DZ 配置; - 定点模式
roll杆:水平速度 x 分量期望角;最大最小值可配置;当摇杆回归中位值时,会触发位置控制器,位置期望值是rol、pitch摇杆回归中位值时刻的位置量;
pitch杆:水平速度 y 分量期望角;最大最小值可配置;
yaw杆:与定高模式相同;
油门杆:与定高模式相同;




![[GSEP202306 一级] C++ 时间规划](https://img-blog.csdnimg.cn/6131aae391834d87bf72fc4eb52d7e58.png)