一、单片机做项目常识
1.行业常识

2.方案选型

3.此项目定位和思路

二、单片机的小项目介绍
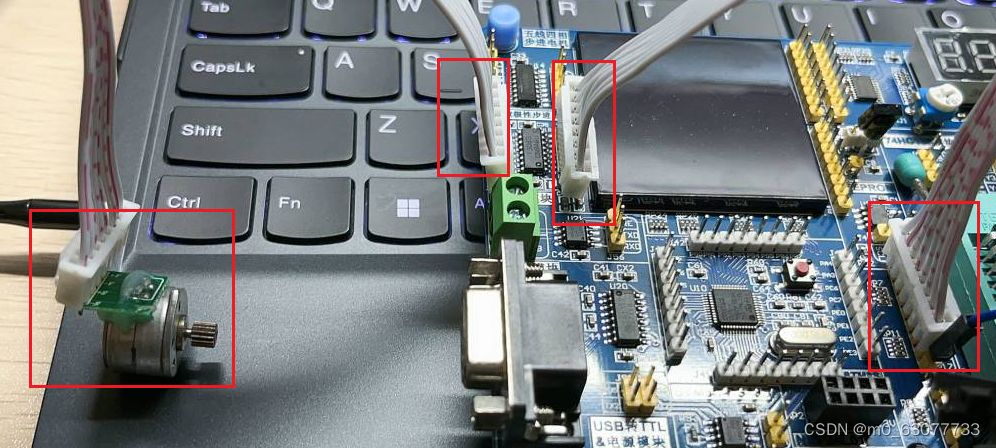
1.项目名称:基于51单片机的温度报警器
(1)主控:stc51;
(2)编程语言:C语言
(3)开发环境:Keil
(4)1602屏显示时间和温度;当温度超过预定值时蜂鸣器和电机工作报警
(5)系统人机界面:矩阵按键或者红外遥控器:修改时间
2.硬件资源分配
优先满足硬件上已经接好的引脚
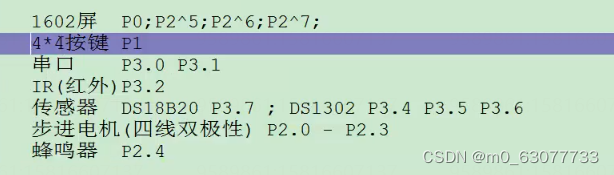
1602屏幕 P0;P2^7 ;P2^5;P2^6
4*4按键 P2
串口 P3.0 P3.1
IR(红外遥控器):P3^2
传感器:DS18B20 P3.7
DS1302 P3.4 P3.6
步进电机(四线双极性)P1.0---P1.5
蜂鸣器 P1.7


3.项目流程
(1)编写,移植,封装,测试顶层硬件模块操作库
(2)梳理,定义应用层功能
(3)逐个实现各功能,并联合调试,测试功能是否正常
(4)实现测试使用,并解决bug持续维护
4.一些小问题

5.项目分层
分2层的体系:驱动层【低层硬件】,应用层【用户交互】
分3层的体系:底层驱动层【硬件--->driver】。上层驱动层【硬件和功能--->model】。应用层---->app
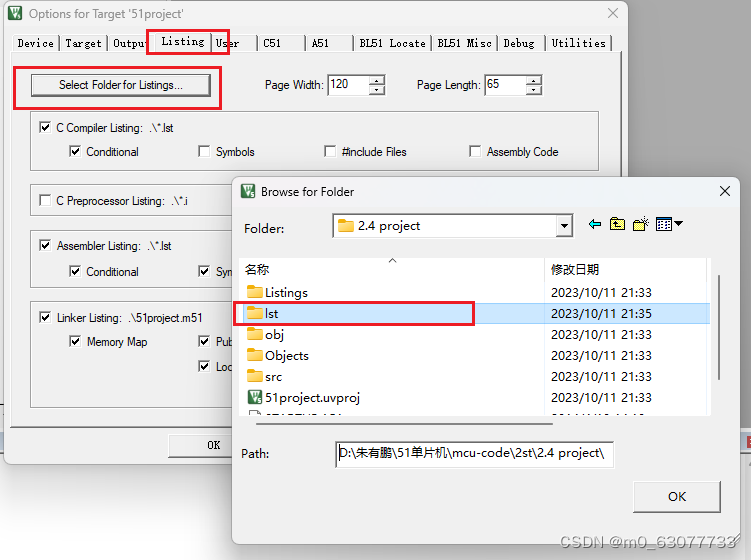
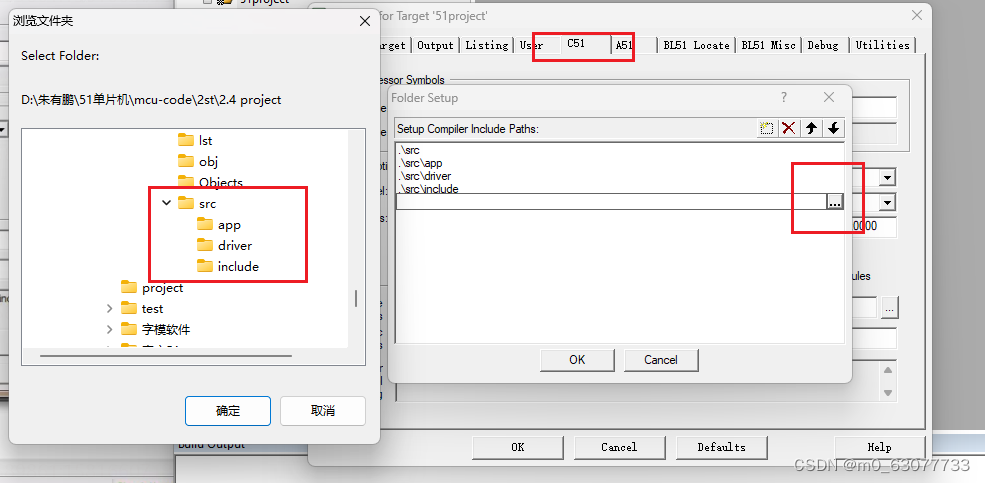
三、构成建立及框架搭建
1.基本搭建
lst
src
app:高层时序【main存放】
driver :低层时序
include:基本的全局变量
obj




2.端口分配检查确定
1602屏幕 P0;P1^4 ; P1.5 ; P 1.6
4*4按键 P2
串口 P3.0 P3.1
IR(红外遥控器):P3^2
传感器:DS18B20 P3.7
DS1302 P3.4 P3.6 P3.5
步进电机(四线双极性)P1.0---P1.3
蜂鸣器 P1.6





四、第一个模块:串口
1.移植并调试确认基本功能
uart.c
#include"uart.h"//串口初始化函数
//预设计一个串口条件:8位数据位,1位停止位,0校验位,波特率9600
//初始化的主要工作是设置相关的寄存器
//使用晶振为11.0592MHz
//CPU工作在12T模式下void uart_init(){//使用8bit串行接口SCON=0x50;//波特率不加倍PCON=0x00;//波特率相关设置TMOD=0x20;//设置T1在模式2TL1=249; //设定定时初值TH1 = 249; //设定定时器重装值TR1=1;//开启T1,开始工作ES=1;//开启串行中断允许位EA=1;//开启全部中断}//串口发送单个字符
void uart_send_byte(unsigned char a){//发送一个字节SBUF=a;//查看当然串口是否在忙//根据SCON中的TI位可以判断当前串口是否在忙//如果数据8位发送结束,则硬件自动将TI=1,则TI=0表示程序还没有发送结束if(!TI)//软件复位TITI=0;
}void uart_send_string(unsigned char *str)
{while (*str != '\0'){uart_send_byte(*str); // 发送1个字符str++; // 指针指向下一个字符}
}2.封装
1.何为封装
(1)隐藏
(2)保护
2.封装低层接口实践
uart.h
//开头2行和最后1行加起来构成一种格式,这种格式利用了c语言的预处理中的条件编译技术,
//实现的效果就是防止该头文件被重复包含构成的错误
#ifndef __UART__H__
#define __UART__H__
#include<reg51.h>//串口初始化函数
//预设计一个串口条件:8位数据位,1位停止位,0校验位,波特率9600
//初始化的主要工作是设置相关的寄存器
//使用晶振为11.0592MHz
//CPU工作在12T模式下
void uart_init();//串口发送单个字符
void uart_send_byte(unsigned char a);
//串口发送字符串
void uart_send_string(unsigned char *str);//延时函数
void Delay2000ms(); //@11.0592MHz#endif五、DS18B20移植(温度显示)
1.static
static void Delay750us():表示只能在该文件内部使用
2.高层时序
初始化函数将复位和检测是否存在分为两个函数,方便封装
/*******************************************************************************
* 函 数 名 : ds18b20_reset
* 函数功能 : 复位DS18B20
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void ds18b20_reset(void)
{DS18B20_PORT=0; //拉低DQdelay_10us(75); //拉低750usDS18B20_PORT=1; //DQ=1delay_10us(2); //20US
}/*******************************************************************************
* 函 数 名 : ds18b20_check
* 函数功能 : 检测DS18B20是否存在
* 输 入 : 无
* 输 出 : 1:未检测到DS18B20的存在,0:存在
*******************************************************************************/
u8 ds18b20_check(void)
{u8 time_temp=0;while(DS18B20_PORT&&time_temp<20) //等待DQ为低电平{time_temp++;delay_10us(1); }if(time_temp>=20)return 1; //如果超时则强制返回1else time_temp=0;while((!DS18B20_PORT)&&time_temp<20) //等待DQ为高电平{time_temp++;delay_10us(1);}if(time_temp>=20)return 1; //如果超时则强制返回1return 0;
}/*******************************************************************************
* 函 数 名 : ds18b20_start
* 函数功能 : 开始温度转换
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
//转换命令
void ds18b20_start(void)
{ds18b20_reset();//复位ds18b20_check();//检查DS18B20ds18b20_write_byte(0xcc);//SKIP ROMds18b20_write_byte(0x44);//转换命令
}/*******************************************************************************
* 函 数 名 : ds18b20_init
* 函数功能 : 初始化DS18B20的IO口 DQ 同时检测DS的存在
* 输 入 : 无
* 输 出 : 1:不存在,0:存在
*******************************************************************************/
u8 ds18b20_init(void)
{ds18b20_reset();return ds18b20_check();
}/*******************************************************************************
* 函 数 名 : ds18b20_read_temperture
* 函数功能 : 从ds18b20得到温度值
* 输 入 : 无
* 输 出 : 温度数据
*******************************************************************************/
float ds18b20_read_temperture(void)
{float temp;u8 dath=0;u8 datl=0;u16 value=0;//开始转换:开启转换命令ds18b20_start();//将各个电线置为默认电平ds18b20_reset();//复位//判断当前程序是否在忙ds18b20_check();//发送读取温度命令ds18b20_write_byte(0xcc);//SKIP ROMds18b20_write_byte(0xbe);//读存储器datl=ds18b20_read_byte();//低字节dath=ds18b20_read_byte();//高字节value=(dath<<8)+datl;//合并为16位数据if((value&0xf800)==0xf800)//判断符号位,负温度{value=(~value)+1; //数据取反再加1temp=value*(-0.0625);//乘以精度 }else //正温度{temp=value*0.0625; }return temp;
}
3.遇到的问题
问题:double t=24.5;要用串口把24.5打印出来给串口助手去显示
串口助手显示方式有2种:二进制方式和文本方式。文本方式最直观,但是需要通过串口去发送的不是double,不是int,而是ASCII码的字符串
意思是:想要看到25.4,的uart_send_string("25.4");
所以我们需要一个函数,能够把double类型的t,给转成对应的字符串来去给串口显示
lcd1602.c
// 显示类似于24.5这种的double类型的数字
void LcdShowDouble(unsigned char x, unsigned char y, double d)
{// 第一步:将double d转成字符串strunsigned char str[5] = {0};// 第1步:先由double的25.4得到uint的254unsigned int tmp = (unsigned int)(d * 10); unsigned char c = 0;// 第2步:由/和%操作来得到2、5、4// 第3步:将2、5、4对应的ASCII码放到字符串中去,完成c = (unsigned char)(tmp / 100);str[0] = c + 48;tmp = tmp % 100; // 运算后tmp=54c = (unsigned char)(tmp / 10); // c = 5str[1] = c + 48;str[2] = '.';tmp = tmp % 10; // 运算后tmp=4c = (unsigned char)(tmp / 1); // c = 4str[3] = c + 48;str[4] = '\0';// 第二步:显示strLcdShowStr(x, y, str);
}ds18b20
#include "ds18b20.h"
#include "intrins.h"/*******************************************************************************
* 函 数 名 : delay_10us
* 函数功能 : 延时函数,ten_us=1时,大约延时10us
* 输 入 : ten_us
* 输 出 : 无
*******************************************************************************/
void delay_10us(u16 ten_us)
{while(ten_us--);
}/*******************************************************************************
* 函 数 名 : delay_ms
* 函数功能 : ms延时函数,ms=1时,大约延时1ms
* 输 入 : ms:ms延时时间
* 输 出 : 无
*******************************************************************************/
void delay_ms(u16 ms)
{u16 i,j;for(i=ms;i>0;i--)for(j=110;j>0;j--);
}
/*******************************************************************************
* 函 数 名 : ds18b20_reset
* 函数功能 : 复位DS18B20
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void ds18b20_reset(void)
{DS18B20_PORT=0; //拉低DQdelay_10us(75); //拉低750usDS18B20_PORT=1; //DQ=1delay_10us(2); //20US
}/*******************************************************************************
* 函 数 名 : ds18b20_check
* 函数功能 : 检测DS18B20是否存在
* 输 入 : 无
* 输 出 : 1:未检测到DS18B20的存在,0:存在
*******************************************************************************/
u8 ds18b20_check(void)
{u8 time_temp=0;while(DS18B20_PORT&&time_temp<20) //等待DQ为低电平{time_temp++;delay_10us(1); }if(time_temp>=20)return 1; //如果超时则强制返回1else time_temp=0;while((!DS18B20_PORT)&&time_temp<20) //等待DQ为高电平{time_temp++;delay_10us(1);}if(time_temp>=20)return 1; //如果超时则强制返回1return 0;
}
/*******************************************************************************
* 函 数 名 : ds18b20_read_bit
* 函数功能 : 从DS18B20读取一个位
* 输 入 : 无
* 输 出 : 1/0
*******************************************************************************/
u8 ds18b20_read_bit(void)
{u8 dat=0;DS18B20_PORT=0;_nop_();_nop_();DS18B20_PORT=1; _nop_();_nop_(); //该段时间不能过长,必须在15us内读取数据if(DS18B20_PORT)dat=1; //如果总线上为1则数据dat为1,否则为0else dat=0;delay_10us(5);return dat;
} /*******************************************************************************
* 函 数 名 : ds18b20_read_byte
* 函数功能 : 从DS18B20读取一个字节
* 输 入 : 无
* 输 出 : 一个字节数据
*******************************************************************************/
u8 ds18b20_read_byte(void)
{u8 i=0;u8 dat=0;u8 temp=0;for(i=0;i<8;i++)//循环8次,每次读取一位,且先读低位再读高位{temp=ds18b20_read_bit();dat=(temp<<7)|(dat>>1);}return dat;
}/*******************************************************************************
* 函 数 名 : ds18b20_write_byte
* 函数功能 : 写一个字节到DS18B20
* 输 入 : dat:要写入的字节
* 输 出 : 无
*******************************************************************************/
void ds18b20_write_byte(u8 dat)
{u8 i=0;u8 temp=0;for(i=0;i<8;i++)//循环8次,每次写一位,且先写低位再写高位{temp=dat&0x01;//选择低位准备写入dat>>=1;//将次高位移到低位if(temp)//此时表示读入位为“1”{DS18B20_PORT=0;_nop_();_nop_();DS18B20_PORT=1; delay_10us(6);}else{DS18B20_PORT=0;delay_10us(6);DS18B20_PORT=1;_nop_();_nop_(); } }
}/*******************************************************************************
* 函 数 名 : ds18b20_start
* 函数功能 : 开始温度转换
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
//转换命令
void ds18b20_start(void)
{ds18b20_reset();//复位ds18b20_check();//检查DS18B20ds18b20_write_byte(0xcc);//SKIP ROMds18b20_write_byte(0x44);//转换命令
}/*******************************************************************************
* 函 数 名 : ds18b20_init
* 函数功能 : 初始化DS18B20的IO口 DQ 同时检测DS的存在
* 输 入 : 无
* 输 出 : 1:不存在,0:存在
*******************************************************************************/
u8 ds18b20_init(void)
{ds18b20_reset();return ds18b20_check();
}/*******************************************************************************
* 函 数 名 : ds18b20_read_temperture
* 函数功能 : 从ds18b20得到温度值
* 输 入 : 无
* 输 出 : 温度数据
*******************************************************************************/
float ds18b20_read_temperture(void)
{float temp;u8 dath=0;u8 datl=0;u16 value=0;//开始转换:开启转换命令ds18b20_start();//将各个电线置为默认电平ds18b20_reset();//复位//判断当前程序是否在忙ds18b20_check();//发送读取温度命令ds18b20_write_byte(0xcc);//SKIP ROMds18b20_write_byte(0xbe);//读存储器datl=ds18b20_read_byte();//低字节dath=ds18b20_read_byte();//高字节value=(dath<<8)+datl;//合并为16位数据if((value&0xf800)==0xf800)//判断符号位,负温度{value=(~value)+1; //数据取反再加1temp=value*(-0.0625);//乘以精度 }else //正温度{temp=value*0.0625; }return temp;
}/*
double Ds18b20ReadTemp(void)
{unsigned int temp = 0;unsigned char tmh = 0, tml = 0;double t = 0;Ds18b20ChangTemp(); //先写入转换命令Ds18b20ReadTempCom(); //然后等待转换完后发送读取温度命令tml = Ds18b20ReadByte(); //读取温度值共16位,先读低字节tmh = Ds18b20ReadByte(); //再读高字节
// temp = tmh;
// temp <<= 8;
// temp |= tml;temp = tml | (tmh << 8);t = temp * 0.0625;return t;
}*/六、LCD1602移植
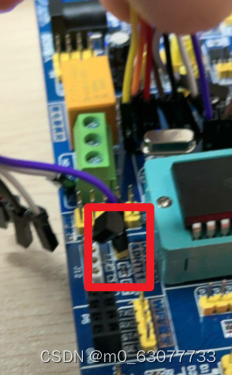
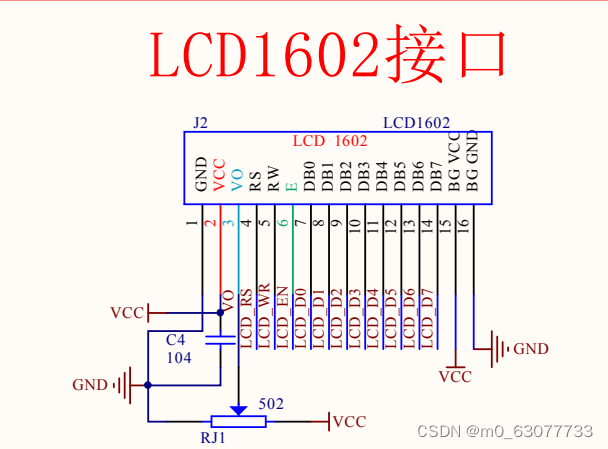
1.1602的接线
1602的引脚是事先接好的,所以不能改变
1602屏幕 P0;P2^7 ;P2^5;P2^6
2.lcd1602.c
#include <reg51.h>
#include "lcd1602.h"
// 对LCD1602的底层以及高层时序做封装/************ 低层时序 ********************************/
static void Read_Busy() //忙检测函数,判断bit7是0,允许执行;1禁止
{unsigned char sta; //LCD1602_DB = 0xff;LCD1602_RS = 0;LCD1602_RW = 1;do{LCD1602_EN = 1;sta = LCD1602_DB;LCD1602_EN = 0; //使能,用完就拉低,释放总线}while(sta & 0x80);
}static void Lcd1602_Write_Cmd(unsigned char cmd) //写命令
{Read_Busy();LCD1602_RS = 0;LCD1602_RW = 0; LCD1602_DB = cmd;LCD1602_EN = 1;LCD1602_EN = 0;
}static void Lcd1602_Write_Data(unsigned char dat) //写数据
{Read_Busy();LCD1602_RS = 1;LCD1602_RW = 0;LCD1602_DB = dat;LCD1602_EN = 1;LCD1602_EN = 0;
}/************* 高层时序 ******************************/
// 本函数用来设置当前光标位置,其实就是设置当前正在编辑的位置,
// 其实就是内部的数据地址指针,其实就是RAM显存的偏移量
// x范围是0-15,y=0表示上面一行,y=1表示下面一行
static void LcdSetCursor(unsigned char x,unsigned char y) //坐标显示
{unsigned char addr;if(y == 0)addr = 0x00 + x;elseaddr = 0x40 + x;Lcd1602_Write_Cmd(addr|0x80);
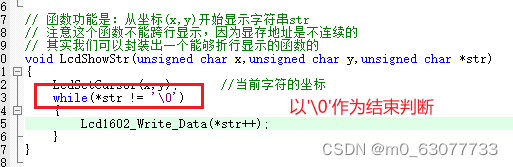
}// 函数功能是:从坐标(x,y)开始显示字符串str
// 注意这个函数不能跨行显示,因为显存地址是不连续的
// 其实我们可以封装出一个能够折行显示的函数的
void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str) //显示字符串
{LcdSetCursor(x,y); //当前字符的坐标while(*str != '\0'){Lcd1602_Write_Data(*str++);}
}// 初始化LCD,使之能够开始正常工作
void InitLcd1602() //1602初始化
{Lcd1602_Write_Cmd(0x38); //打开,5*8,8位数据//Lcd1602_Write_Cmd(0x0c); // 打开显示并且无光标Lcd1602_Write_Cmd(0x0f); // 打开显示并且光标闪烁Lcd1602_Write_Cmd(0x06);Lcd1602_Write_Cmd(0x01); //清屏
}3.lcd1602.h
#ifndef __lcd1602__H__
#define __lcd1602__H__#include<reg51.h>// IO接口定义
#define LCD1602_DB P0 //data bus 数据总线
// 控制总线
sbit LCD1602_RS = P2^6; //选择读取数据/命令
sbit LCD1602_RW = P2^5; //选择读/写
sbit LCD1602_EN = P2^7; //使能#define u8 unsigned char //只需要声明高层时序即可,而底层时序是不需要声明
//因为我们在头文件中声明这个函数,目的是为了让别的文件去包含这个
//从而调用这个头文件中声明的函数,所以我们只需要声明1602.c中将来
//会被外部.c文件调用的哪些函数即可,而且1602.c中自己使用的内部函数将来也
//不会被外部.c文件调用,因此就不用声明了。/************* 高层时序 ******************************/
// 本函数用来设置当前光标位置,其实就是设置当前正在编辑的位置,
// 其实就是内部的数据地址指针,其实就是RAM显存的偏移量
// x范围是0-15,y=0表示上面一行,y=1表示下面一行
void LcdSetCursor(unsigned char x,unsigned char y);// 函数功能是:从坐标(x,y)开始显示字符串str
// 注意这个函数不能跨行显示,因为显存地址是不连续的
// 其实我们可以封装出一个能够折行显示的函数的
void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str);
//void lcd1602_show_string(u8 x,u8 y,u8 *str);
// 初始化LCD,使之能够开始正常工作
void InitLcd1602();#endif4.lcd与测温联调
1.将double转换为字符串
因为LCD中的显示函数要求输入的是字符串
此处,我们为了设置方便,要求温度只能精确到小数点后一位。
将数值转换为字符串的实质,其实就是将单独一个数值强制类型转化为unsigned char
//显示类似于24.5这种的double类型的数字
/**思路:1)先将其一位一位显示出来2)然后将其强制类型转换为unsigned char3)记得最后有一个'\0'
*/
void LcdShowDouble(unsigned char x,unsigned char y,double d){// 第一步:将double d转成字符串strunsigned char str[5] = {0};// 第1步:先由double的25.4得到uint的254unsigned int tmp = (unsigned int)(d * 10); unsigned char c = 0;// 第2步:由/和%操作来得到2、5、4// 第3步:将2、5、4对应的ASCII码放到字符串中去,完成c = (unsigned char)(tmp / 100);str[0] = c + 48;tmp = tmp % 100; // 运算后tmp=54c = (unsigned char)(tmp / 10); // c = 5str[1] = c + 48;str[2] = '.';tmp = tmp % 10; // 运算后tmp=4c = (unsigned char)(tmp / 1); // c = 4str[3] = c + 48;str[4] = '\0';// 第二步:显示strLcdShowStr(x, y, str);
}void main(void){double t=35.4;InitLcd1602();//LcdShowStr(0,0,"nihaoliaoxiaoyi");LcdShowDouble(0,0,t);
}
2.输出摄氏度符号

3.注意点

我们在定义摄氏度符号的时候发现,在最后的位置出现奇怪的符号,是因为我们没有手动的添加结束符【‘\0’】

5.完整代码
lcd1602.c
#include"lcd1602.h"
/**显示屏:显示温度和时间
*/void Delay2000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();_nop_();i = 85;j = 12;k = 155;do{do{while (--k);} while (--j);} while (--i);
}/************ 低层时序 ********************************/
void Read_Busy() //忙检测函数,判断bit7是0,允许执行;1禁止
{unsigned char sta; //LCD1602_DB = 0xff;LCD1602_RS = 0;LCD1602_RW = 1;do{LCD1602_EN = 1;sta = LCD1602_DB;LCD1602_EN = 0; //使能,用完就拉低,释放总线}while(sta & 0x80);
}void Lcd1602_Write_Cmd(unsigned char cmd) //写命令
{Read_Busy();LCD1602_RS = 0;LCD1602_RW = 0; LCD1602_DB = cmd;LCD1602_EN = 1;LCD1602_EN = 0;
}void Lcd1602_Write_Data(unsigned char dat) //写数据
{Read_Busy();LCD1602_RS = 1;LCD1602_RW = 0;LCD1602_DB = dat;LCD1602_EN = 1;LCD1602_EN = 0;
}/************* 高层时序 ******************************/
// 本函数用来设置当前光标位置,其实就是设置当前正在编辑的位置,
// 其实就是内部的数据地址指针,其实就是RAM显存的偏移量
// x范围是0-15,y=0表示上面一行,y=1表示下面一行
void LcdSetCursor(unsigned char x,unsigned char y) //坐标显示
{unsigned char addr;if(y == 0)addr = 0x00 + x;elseaddr = 0x40 + x;Lcd1602_Write_Cmd(addr|0x80);
}// 函数功能是:从坐标(x,y)开始显示字符串str
// 注意这个函数不能跨行显示,因为显存地址是不连续的
// 其实我们可以封装出一个能够折行显示的函数的
void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str) //显示字符串
{LcdSetCursor(x,y); //当前字符的坐标while(*str != '\0'){Lcd1602_Write_Data(*str++);}}// 初始化LCD,使之能够开始正常工作
void InitLcd1602() //1602初始化
{Lcd1602_Write_Cmd(0x38); //打开,5*8,8位数据Lcd1602_Write_Cmd(0x0c); // 打开显示并且无光标//Lcd1602_Write_Cmd(0x0f); // 打开显示并且光标闪烁Lcd1602_Write_Cmd(0x06);Lcd1602_Write_Cmd(0x01); //清屏
}/**
为了显示ds18b20中获取到的浮点数温度
使其可以在显示屏上显示
*/
// 显示类似于24.5这种的double类型的数字
void LcdShowFloat(unsigned char x, unsigned char y, float d)
{// 第一步:将double d转成字符串strunsigned char str[5] = {0};// 第1步:先由double的25.4得到uint的254unsigned int tmp = (unsigned int)(d * 10); unsigned char c = 0;// 第2步:由/和%操作来得到2、5、4// 第3步:将2、5、4对应的ASCII码放到字符串中去,完成c = (unsigned char)(tmp / 100);str[0] = c + 48;tmp = tmp % 100; // 运算后tmp=54c = (unsigned char)(tmp / 10); // c = 5str[1] = c + 48;str[2] = '.';tmp = tmp % 10; // 运算后tmp=4c = (unsigned char)(tmp / 1); // c = 4str[3] = c + 48;str[4] = '\0';// 第二步:显示strLcdShowStr(x, y, str);}七、DS1302的移植和联调(实时时钟)
1.原理图和接线
DS1302 P3.4 P3.6

2.时间的封装(使用结构体)
(1)一个时间=年 月 日 分 秒 周几(相比于温度是一个简单变量)
(2)C语言提供结构体这种技巧,来处理复杂变量
(3)区分2个概念:结构体类型【不占内存】和结构体变量【占内存】
(4)结构体这种语法使用时有套路:
第一步:先定义结构体类型
第二步:用类型去生产结构体变量
第三步:使用结构体变量(其实就是使用结构体变量肚子里包着的内容)
3.使用结构体读取时间前的准备工作
1.结构体的定义
//封装出来的一个表示时间的结构体类型
//类型不占内存,也不表示一个具体时间,但是类型可以用来生成时间
//每一个时间变量占一定的内存,每一个时间变量就代表一个具体的时间
struct time_t
{unsigned int year;//2023unsigned char mon;//1-12unsigned char date;//1-31【几号】unsigned char hour;//0-23unsigned char min;//0-59unsigned char sec;//0-59unsigned char day;//0-6【星期几】
};2.宏定义
之前我们使用DS1302的时候,是使用数组来记录寄存器地址。此处,我们使用结构体,则使用宏定义来实现使得CPU运行时间得到提升
// 用来存储读取的时间的,格式是:秒分时日月周年
//unsigned char code READ_RTC_ADDR[7] = {0x81, 0x83, 0x85, 0x87, 0x89, 0x8b, 0x8d};
//unsigned char code WRITE_RTC_ADDR[7] = {0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};
//用宏定义的方式来定义时间的寄存器地址
// 用宏定义的方式来定义时间的寄存器地址 格式是:秒分时日月周年
//写地址
#define REG_ADDR_YEAR_WRITE 0x8c
#define REG_ADDR_MON_WRITE 0x88
#define REG_ADDR_DATE_WRITE 0x86
#define REG_ADDR_HOUR_WRITE 0x84
#define REG_ADDR_MIN_WRITE 0x82
#define REG_ADDR_SEC_WRITE 0x80
#define REG_ADDR_DAY_WRITE 0x8a//读地址
#define REG_ADDR_YEAR_READ (REG_ADDR_YEAR_WRITE+1)
#define REG_ADDR_MON_READ (REG_ADDR_MON_WRITE+1)
#define REG_ADDR_DATE_READ (REG_ADDR_DATE_WRITE+1)
#define REG_ADDR_HOUR_READ (REG_ADDR_HOUR_WRITE+1)
#define REG_ADDR_MIN_READ (REG_ADDR_MIN_WRITE+1)
#define REG_ADDR_SEC_READ (REG_ADDR_SEC_WRITE+1)
#define REG_ADDR_DAY_READ (REG_ADDR_DAY_WRITE+1)3.读取函数
// 从ds1302的内部寄存器addr读出一个值,作为返回值
static unsigned char ds1302_read_reg(unsigned char addr)
{unsigned char i = 0;unsigned char dat = 0; // 用来存储读取到的一字节数据的unsigned char tmp = 0;// 第1部分: 时序起始SCLK = 0;delay();RST = 0;delay();RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始delay();// 第2部分: 写入要读取的寄存器地址,addrfor (i=0; i<8; i++){dat = addr & 0x01; // SPI是从低位开始传输的DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走delay(); // 读走之后,一个小周期就完了SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备delay();addr >>= 1; // 把addr右移一位}// 第3部分: 读出一字节DS1302返回给我们的值dat = 0;for (i=0; i<8; i++){// 在前面向ds1302写入addr的最后一个bit后,ds1302就会将读取到的寄存器值// 的第一个bit放入到IO引脚上,所以我们应该先读取IO再制造下降沿然后继续// 读取下一个bittmp = DSIO;dat |= (tmp << i); // 读出来的数值是低位在前的SCLK = 1; // 由于上面SCLK是低,所以要先拉到高delay();SCLK = 0; // 拉低SCLK制造一个下降沿delay();}// 第4部分: 时序结束SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的delay();RST = 0; // RST拉低意味着一个大周期的结束delay();// 第5部分:解决读取时间是ff的问题DSIO = 0;return dat;
}// 用结构体方式来实现的读取时间的函数
// READ_RTC_ADDR格式是:秒分时日月周年
void ds1302_read_time_struct(void)
{mytime.year = ds1302_read_reg(REG_ADDR_YEAR_READ) + 2000;mytime.mon = ds1302_read_reg(REG_ADDR_MON_READ);mytime.date = ds1302_read_reg(REG_ADDR_DATE_READ);mytime.hour = ds1302_read_reg(REG_ADDR_HOUR_READ);mytime.min = ds1302_read_reg(REG_ADDR_MIN_READ);mytime.sec = ds1302_read_reg(REG_ADDR_SEC_READ);mytime.day = ds1302_read_reg(REG_ADDR_DAY_READ);
}4.日期转换为字符串
因为我们获取到的数值是一串字符串,而我们要的是4位的年,2位的日期
所以我们为了把它区分开来,同时将其转换为字符串输出到lcd1602上

lcd1602.c
我们封装了2个函数分别将数值转换为字符串
// 实现一个子函数,将十进制的4位整数转成一个字符串
void Int2Str4(unsigned int dat, unsigned char str[], unsigned char index)
{unsigned char c = 0;// 假设dat=2017c = dat / 1000; // c = 2str[index+0] = c + '0'; // 第1位入库dat %= 1000; // dat = 017c = dat / 100; // c = 0str[index+1] = c + '0'; // 第2位入库dat %= 100; // dat = 17c = dat / 10; // c = 1str[index+2] = c + '0'; // 第3位入库dat %= 10; // dat = 7c = dat / 1; // c = 7str[index+3] = c + '0'; // 第4位入库
}// 实现一个子函数,将十进制的2位整数转成一个字符串
void Int2Str2(unsigned int dat, unsigned char str[], unsigned char index)
{unsigned char c = 0;// 假设dat=17c = dat / 10; // c = 1str[index+0] = c + '0'; // 第1位入库dat %= 10; // dat = 7c = dat / 1; // c = 7str[index+1] = c + '0'; // 第2位入库
}// LCD1602上显示time_t
void LcdShowTimeT(unsigned char x, unsigned char y, struct time_t ti)
{// 第一步:将struct time_t ti转成字符串str// 格式:20170406113515-4unsigned char str[17] = {0};// 格式化time_t里面的各个时间,然后填充str// 年的格式化,str[0]-str[3]放年字符串Int2Str4(ti.year, str, 0);// 月的格式化 ,str[4]-str[5]Int2Str2(ti.mon, str, 4);// 日的格式化 ,str[6]-str[7]Int2Str2(ti.date, str, 6);// 时的格式化 ,str[8]-str[9]Int2Str2(ti.hour, str, 8);// 分的格式化 ,str[10]-str[11]Int2Str2(ti.min, str, 10);// 秒的格式化 ,str[12]-str[13]Int2Str2(ti.sec, str, 12);// 填充了一个'-' str[14]str[14] = '-';// 周几的格式化 ,str[15]str[15] = ti.day + '0';str[16] = '\0';// 第二步:显示strLcdShowStr(x, y, str);
}main.c
unsigned char c=0;InitLcd1602();LcdShowStr(0,0,"temp=");//0-4//显示:°CLcdShowStr(9,0,du);while(1){//读取温度并显示t=Ds18b20ReadTemp2();//显示温度值LcdShowDouble(5,0,t);//读取时间并且显示ds1302_read_time_struct();LcdShowTimeT(0,1,mytime);}
5.进制转换
【单片机】13-实时时钟DS1302-CSDN博客
BCD码与十进制数间转换_bcd码转十进制-CSDN博客
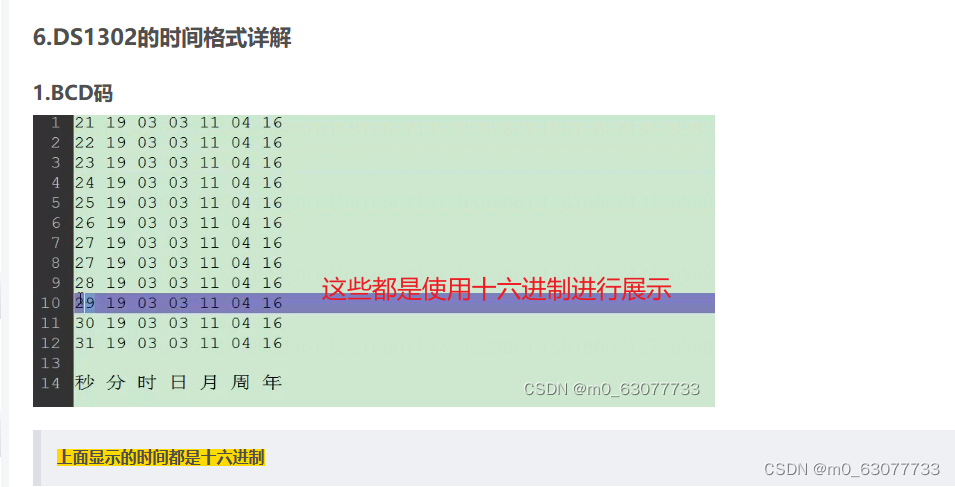
BCD码:看起来像十进制,但是实际上是十六进制
我们想要机器可以识别十六进制,则应该将其外观修改为真正的十六进制【也就是把外观和本质都修改为十六进制】bcd---》hex
比如:我们通过ds1302获得原始数据就为BCD码【此时:0x24实际上是十进制,所以我们要将其转换为0x18(这个才是真正的十六进制)】
我们在学习ds1302的时候说到:读出的其实是BCD码,所以才会产生乱码。故我们要进行转换才可以正确的显示。

// 实现2个子函数,分别实现从bcd码转十六进制,和十六进制转bcd码
unsigned char bcd2hex(unsigned char bcd)
{// 譬如我们现在要把bcd码0x24转成24(0x18)// 思路就是分2步// 第1步,先从0x24得到2和4// ((bcd & 0xf0) >> 4) 高4位,也就是2// (bcd & 0x0f) 低4位,也就是4// 第2步,由2*10+4得到24return (((bcd & 0xf0) >> 4) * 10 + (bcd & 0x0f));
}unsigned char hex2bcd(unsigned char hex)
{// 就是要把24转成0x24// 第一步,先由24得到2和4// (24 / 10) 就是2, (24 % 10)就是4// 第二步,再组合成0x24return (((hex / 10) << 4) | (hex % 10));
}
// 用结构体方式来实现的读取时间的函数
// READ_RTC_ADDR格式是:秒分时日月周年
void ds1302_read_time_struct(void)
{mytime.year = bcd2hex(ds1302_read_reg(REG_ADDR_YEAR_READ)) + 2000;mytime.mon = bcd2hex(ds1302_read_reg(REG_ADDR_MON_READ));mytime.date = bcd2hex(ds1302_read_reg(REG_ADDR_DATE_READ));mytime.hour = bcd2hex(ds1302_read_reg(REG_ADDR_HOUR_READ));mytime.min = bcd2hex(ds1302_read_reg(REG_ADDR_MIN_READ));mytime.sec = bcd2hex(ds1302_read_reg(REG_ADDR_SEC_READ));mytime.day = bcd2hex(ds1302_read_reg(REG_ADDR_DAY_READ));
}

6.时间设置
我们要向DS1302中写入时间,让其按照这个时间接着往下走
因为我们传入的时间是十进制,要被DS1302所识别着应该转换为BCD码才可以,所以使用hex2bcd。【因为BCD码只能识别0-256,所以我们需要在“年”后面-2000】
ds1302.c
// 向ds1302的内部寄存器addr写入一个值value
static void ds1302_write_reg(unsigned char addr, unsigned char value)
{unsigned char i = 0;unsigned char dat = 0;// 第1部分: 时序起始SCLK = 0;delay();RST = 0;delay();RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始delay();// 第2部分: 写入第1字节,addrfor (i=0; i<8; i++){dat = addr & 0x01; // SPI是从低位开始传输的DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走delay(); // 读走之后,一个小周期就完了SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备delay();addr >>= 1; // 把addr右移一位}// 第3部分: 写入第2字节,valuefor (i=0; i<8; i++){dat = value & 0x01; // SPI是从低位开始传输的DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走delay(); // 读走之后,一个小周期就完了SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备delay();value = value >> 1; // 把addr右移一位}// 第4部分: 时序结束SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的delay();RST = 0; // RST拉低意味着一个大周期的结束delay();
}//用结构体方式在实现时间的修改函数
//本函数用于向DS1302中写入一个时间t1
void ds1302_write_time_struct(struct time_t t1){ds1302_write_reg(0x8E, 0x00); // 去掉写保护// 依次写各个时间寄存器ds1302_write_reg(REG_ADDR_YEAR_WRITE, (hex2bcd(t1.year - 2000)));ds1302_write_reg(REG_ADDR_MON_WRITE, (hex2bcd(t1.mon)));ds1302_write_reg(REG_ADDR_DATE_WRITE, (hex2bcd(t1.date)));ds1302_write_reg(REG_ADDR_HOUR_WRITE, (hex2bcd(t1.hour)));ds1302_write_reg(REG_ADDR_MIN_WRITE, (hex2bcd(t1.min)));ds1302_write_reg(REG_ADDR_SEC_WRITE, (hex2bcd(t1.sec)));ds1302_write_reg(REG_ADDR_DAY_WRITE, (hex2bcd(t1.day)));ds1302_write_reg(0x8E, 0x80); // 打开写保护}main.c
struct time_t t1;float t;InitLcd1602();LcdShowStr(0,0,"temp=");LcdShowStr(9,0,du);t1.year = 2023;t1.mon = 10;t1.date = 14;t1.hour = 21;t1.min = 6;t1.sec = 45;t1.day = 6;//将时间写入寄存器ds1302_write_time_struct(t1);while(1){//显示温度t=ds18b20_read_temperture();LcdShowFloat(5,0,t);// 读取时间并显示ds1302_read_time_struct();LcdShowTimeT(0, 1, mytime);}
7.单独修改时间
//只修改年份
void ds1302_write_time_year(unsigned int year){ds1302_write_reg(0x8E, 0x00); // 去掉写保护// 依次写各个时间寄存器ds1302_write_reg(REG_ADDR_YEAR_WRITE, (hex2bcd(year - 2000)));ds1302_write_reg(0x8E, 0x80); // 打开写保护}//只修改月份
void ds1302_write_time_month(unsigned char month){ds1302_write_reg(0x8E, 0x00); // 去掉写保护// 依次写各个时间寄存器ds1302_write_reg(REG_ADDR_MON_WRITE, (hex2bcd(month - 2000)));ds1302_write_reg(0x8E, 0x80); // 打开写保护}//只修改日
void ds1302_write_time_date(unsigned char date){ds1302_write_reg(0x8E, 0x00); // 去掉写保护// 依次写各个时间寄存器ds1302_write_reg(REG_ADDR_DATE_WRITE, (hex2bcd(date - 2000)));ds1302_write_reg(0x8E, 0x80); // 打开写保护}//只修改时
void ds1302_write_time_hour(unsigned char hour){ds1302_write_reg(0x8E, 0x00); // 去掉写保护// 依次写各个时间寄存器ds1302_write_reg(REG_ADDR_HOUR_WRITE, (hex2bcd(hour - 2000)));ds1302_write_reg(0x8E, 0x80); // 打开写保护}//只修改分
void ds1302_write_time_min(unsigned char min){ds1302_write_reg(0x8E, 0x00); // 去掉写保护// 依次写各个时间寄存器ds1302_write_reg(REG_ADDR_MIN_WRITE, (hex2bcd(min - 2000)));ds1302_write_reg(0x8E, 0x80); // 打开写保护}//只修改秒
void ds1302_write_time_sec(unsigned char sec){ds1302_write_reg(0x8E, 0x00); // 去掉写保护// 依次写各个时间寄存器ds1302_write_reg(REG_ADDR_SEC_WRITE, (hex2bcd(sec - 2000)));ds1302_write_reg(0x8E, 0x80); // 打开写保护
9.注意点:
1)从DS1302中获取到的数据是unsigned char ,所以不能超过255,但是我们年份是四位数,所以我们在读取时,应该直接在后面加上2000
2)我们从DS1302中获取到数据是BCD码,所以我们需要将其转换为十六进制
3)我们在显示屏上显示数据,因为我们获取到的是数值,但是要转换为字符串才可以进行展示,所以我们要将获取到的时间转换为字符串


// LCD1602上显示time_t
void LcdShowTimeT(unsigned char x, unsigned char y, struct time_t ti)
{// 第一步:将struct time_t ti转成字符串str// 格式:20170406113515-4unsigned char str[17] = {0};// 格式化time_t里面的各个时间,然后填充str// 年的格式化,str[0]-str[3]放年字符串Int2Str4(ti.year, str, 0);// 月的格式化 ,str[4]-str[5]Int2Str2(ti.mon, str, 4);// 日的格式化 ,str[6]-str[7]Int2Str2(ti.date, str, 6);// 时的格式化 ,str[8]-str[9]Int2Str2(ti.hour, str, 8);// 分的格式化 ,str[10]-str[11]Int2Str2(ti.min, str, 10);// 秒的格式化 ,str[12]-str[13]Int2Str2(ti.sec, str, 12);// 填充了一个'-' str[14]str[14] = '-';// 周几的格式化 ,str[15]str[15] = ti.day + '0';str[16] = '\0';// 第二步:显示strLcdShowStr(x, y, str);
}4)因为年份和其他时间单位的位数不同,所以我们需要将其分开,写成2个函数
// 实现一个子函数,将十进制的4位整数转成一个字符串
void Int2Str4(unsigned int dat, unsigned char str[], unsigned char index)
{unsigned char c = 0;// 假设dat=2017c = dat / 1000; // c = 2str[index+0] = c + '0'; // 第1位入库dat %= 1000; // dat = 017c = dat / 100; // c = 0str[index+1] = c + '0'; // 第2位入库dat %= 100; // dat = 17c = dat / 10; // c = 1str[index+2] = c + '0'; // 第3位入库dat %= 10; // dat = 7c = dat / 1; // c = 7str[index+3] = c + '0'; // 第4位入库
}// 实现一个子函数,将十进制的2位整数转成一个字符串
void Int2Str2(unsigned int dat, unsigned char str[], unsigned char index)
{unsigned char c = 0;// 假设dat=17c = dat / 10; // c = 1str[index+0] = c + '0'; // 第1位入库dat %= 10; // dat = 7c = dat / 1; // c = 7str[index+1] = c + '0'; // 第2位入库
}5)写入时间,因为我们传入的是十六进制,但是为了让DS1302识别,所以需要将其转换为bcd码
//十六进制转换为bcd码
unsigned char hex2bcd(unsigned char hex)
{// 就是要把24转成0x24// 第一步,先由24得到2和4// (24 / 10) 就是2, (24 % 10)就是4// 第二步,再组合成0x24return (((hex / 10) << 4) | (hex % 10));
}6)写入时间函数
//用结构体方式在实现时间的修改函数
//本函数用于向DS1302中写入一个时间t1
void ds1302_write_time_struct(struct time_t t1){ds1302_write_reg(0x8E, 0x00); // 去掉写保护// 依次写各个时间寄存器ds1302_write_reg(REG_ADDR_YEAR_WRITE, (hex2bcd(t1.year - 2000)));ds1302_write_reg(REG_ADDR_MON_WRITE, (hex2bcd(t1.mon)));ds1302_write_reg(REG_ADDR_DATE_WRITE, (hex2bcd(t1.date)));ds1302_write_reg(REG_ADDR_HOUR_WRITE, (hex2bcd(t1.hour)));ds1302_write_reg(REG_ADDR_MIN_WRITE, (hex2bcd(t1.min)));ds1302_write_reg(REG_ADDR_SEC_WRITE, (hex2bcd(t1.sec)));ds1302_write_reg(REG_ADDR_DAY_WRITE, (hex2bcd(t1.day)));ds1302_write_reg(0x8E, 0x80); // 打开写保护}八、蜂鸣器
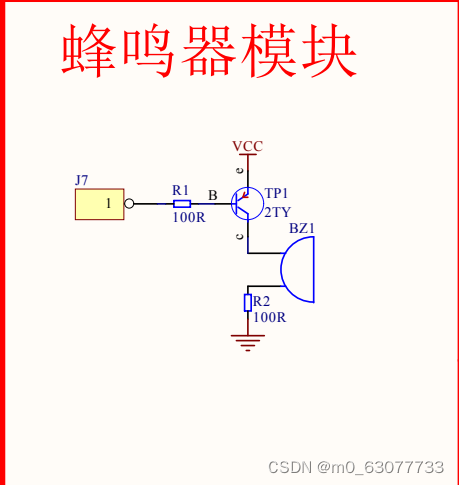
1.接线和原理图
P2^4

2.函数封装
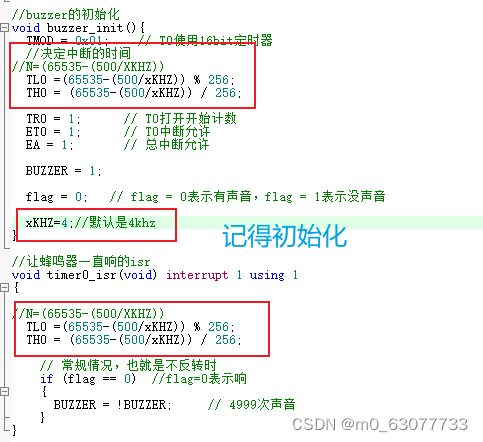
1.初始化
void buzzer_init(){TMOD = 0x01; // T0使用16bit定时器//决定中断的时间TL0 = N % 256;TH0 = N / 256;TR0 = 1; // T0打开开始计数ET0 = 1; // T0中断允许EA = 1; // 总中断允许BUZZER = 1;// 设置响和不响的周期时间/**我们初始化频率为:4KHZ则应该是1/4000HZ的周期1s=1000ms=1000 000us所以1/4000=1000 000/4000=1000/4=256us*/count = TIMELEN; //600*256usflag = 0;
}2.中断函数
//timer0的isr,在这里对引脚进行电平反反转以让蜂鸣器响
void timer0_isr(void) interrupt 1 using 1
{TL0 = N % 256;TH0 = N / 256;if (count-- == 0){// 说明到了翻转的时候了// count = 600;if (flag == 0){// 之前是处于有声音的,说明本次是从有声音到无声音的翻转flag = 1;//*10:表示不响的时间是响的时间的10倍count = TIMELEN*10; //这里的count数量决定蜂鸣器【不响】的时间长短}else{// 之前是处于没声音的,说明本次是从没声音到有声音的翻转flag = 0;BUZZER = !BUZZER;count = TIMELEN; //这里的count数量决定蜂鸣器【响】的时间长短}}//时间未到else{// 常规情况,也就是不反转时if (flag == 0){BUZZER = !BUZZER; // 4999次声音}else{// 空的就可以,因为不进行任何IO操作就是没声音}}}3.提升
1.中断函数优化
//宏定义
//设置蜂鸣器的输出频率为XKHZ
#define XKHZ 4 // 要定多少Khz,就直接写这里
#define US (500/XKHZ)
#define N (65535-US)//N=(65535-(500/XKHZ))static unsigned char xKHZ=0; //用于获取N的数值,可以计算响或者不响将初始化函数和中断函数中的N修改,并且将count删除
//让蜂鸣器一直响的isr
void timer0_isr(void) interrupt 1 using 1
{//N=(65535-(500/XKHZ))TL0 =(65535-(500/xKHZ)) % 256;TH0 = (65535-(500/xKHZ)) / 256;// 常规情况,也就是不反转时if (flag == 0) //flag=0表示响{BUZZER = !BUZZER; // 4999次声音}
}
//buzzer的初始化
void buzzer_init(){TMOD = 0x01; // T0使用16bit定时器//决定中断的时间
//N=(65535-(500/XKHZ))TL0 =(65535-(500/xKHZ)) % 256;TH0 = (65535-(500/xKHZ)) / 256;TR0 = 1; // T0打开开始计数ET0 = 1; // T0中断允许EA = 1; // 总中断允许BUZZER = 1;flag = 0; // flag = 0表示有声音,flag = 1表示没声音xKHZ=4;//默认是4khz
}
2.一直响/不响
//让蜂鸣器开始响
void buzzer_start(void){flag=0;
}//让蜂鸣器停止响
void buzzer_stop(void){flag=1;
}//设置蜂鸣器响的频率
void buzzer_freq_set(unsigned char tmp){xKHZ=tmp;//修改蜂鸣器的频率
}3.完整代码
#ifndef __BUZZER__H__
#define __BUZZER__H__#include<reg51.h>
//引脚定义
sbit BUZZER=P1^7;//宏定义
//设置蜂鸣器的输出频率为XKHZ
#define XKHZ 4 // 要定多少Khz,就直接写这里
#define US (500/XKHZ)
#define N (65535-US)//N=(65535-(500/XKHZ))//蜂鸣器响或者不响的时间设置
#define TIMELEN 600static unsigned int count;
static unsigned char flag = 0; // flag = 0表示有声音,flag = 1表示没声音
static unsigned char xKHZ=0; //用于获取N的数值,可以计算响或者不响//buzzer的初始化
//初始化表示默认情况下是不响的
void buzzer_init();//让蜂鸣器开始响
void buzzer_start(void);//让蜂鸣器停止响
void buzzer_stop(void);//设置蜂鸣器响的频率
void buzzer_freq_set(unsigned char tmp);#endif#include"buzzer.h"//buzzer的初始化
void buzzer_init(){xKHZ=4;//默认是4khzTMOD = 0x01; // T0使用16bit定时器//决定中断的时间
//N=(65535-(500/XKHZ))TL0 =(65535-(500/xKHZ)) % 256;TH0 = (65535-(500/xKHZ)) / 256;TR0 = 1; // T0打开开始计数ET0 = 1; // T0中断允许EA = 1; // 总中断允许BUZZER = 1;flag = 1; // flag = 0表示有声音,flag = 1表示没声音}//让蜂鸣器一直响的isr
void timer0_isr(void) interrupt 1 using 1
{//N=(65535-(500/XKHZ))TL0 =(65535-(500/xKHZ)) % 256;TH0 = (65535-(500/xKHZ)) / 256;// 常规情况,也就是不反转时if (flag == 0) //flag=0表示响{BUZZER = !BUZZER; // 4999次声音}
}//让蜂鸣器开始响
void buzzer_start(void){flag=0;
}//让蜂鸣器停止响
void buzzer_stop(void){flag=1;
}//设置蜂鸣器响的频率
void buzzer_freq_set(unsigned char tmp){xKHZ=tmp;//修改蜂鸣器的频率
}4.蜂鸣器频率设置(中间变量的使用)
上面的代码我们无法修改频率
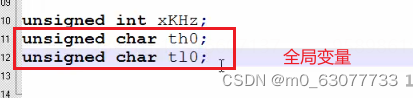
原因:因为65535数值过大,如果在中断函数中进行计算,则会消耗大量时间,所以才会产生结果不同。所以我们先在初始化函数中将值计算好,然后将其赋值给全局变量,然后再中断函数中将全局变量的值给中断函数中的值。
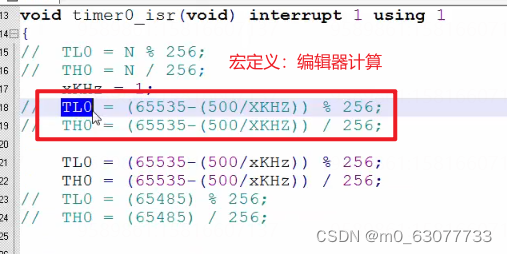
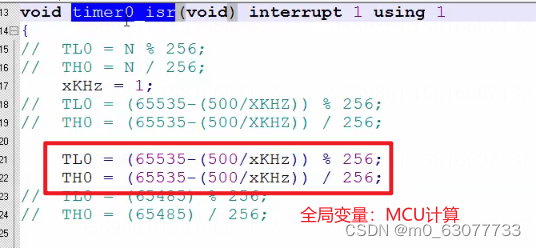
XKHZ:宏定义
xKHZ:全局变量
解决思路:
所以我们先在初始化函数中将值计算好,然后将其赋值给全局变量,然后再中断函数中将全局变量的值给中断函数。

代码实现:
buzzer.c
#include"buzzer.h"//buzzer的初始化
void buzzer_init(){TMOD = 0x01; // T0使用16bit定时器//决定中断的时间
//N=(65535-(500/XKHZ))tl0 =(65535-(500/xKHZ)) % 256;th0 = (65535-(500/xKHZ)) / 256;//将计算得到的值赋值给全局变量TH0=th0;TL0=tl0;TR0 = 1; // T0打开开始计数ET0 = 1; // T0中断允许EA = 1; // 总中断允许BUZZER = 1;flag = 1; // flag = 0表示有声音,flag = 1表示没声音}//让蜂鸣器一直响的isr
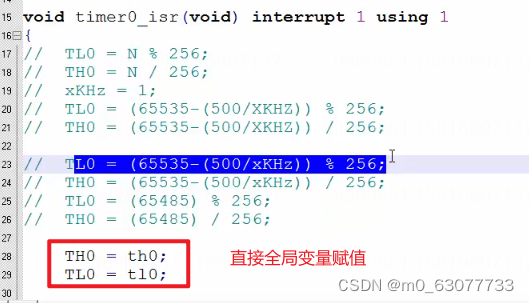
void timer0_isr(void) interrupt 1 using 1
{//N=(65535-(500/XKHZ))
//
// 因为65535数值过大,如果在中断函数中进行计算,则会消耗大量时间,
// 所以才会产生结果不同。所以我们先在初始化函数中将值计算好,
// 然后将其赋值给全局变量,然后再中断函数中将全局变量的值给中断函数。//TL0 =(65535-(500/xKHZ)) % 256;//TH0 = (65535-(500/xKHZ)) / 256;TH0=th0;TL0=tl0;// 常规情况,也就是不反转时if (flag == 0) //flag=0表示响{BUZZER = !BUZZER; // 4999次声音}
}//让蜂鸣器开始响
void buzzer_start(void){flag=0;
}//让蜂鸣器停止响
void buzzer_stop(void){flag=1;
}//设置蜂鸣器响的频率
void buzzer_freq_set(unsigned char tmp)
{tl0 = (65535 - (500 / tmp)) % 256;th0 = (65535 - (500 / tmp)) / 256;
}
buzzer.h
#ifndef __BUZZER__H__
#define __BUZZER__H__#include<reg51.h>
//引脚定义
sbit BUZZER=P1^7;//宏定义
//设置蜂鸣器的输出频率为XKHZ
//#define XKHZ 4 // 要定多少Khz,就直接写这里
//#define US (500/XKHZ)
//#define N (65535-US)//N=(65535-(500/XKHZ))//蜂鸣器响或者不响的时间设置
//#define TIMELEN 600static unsigned int count;
static unsigned char flag = 0; // flag = 0表示有声音,flag = 1表示没声音
static unsigned char xKHZ=1; //用于获取N的数值,可以计算响或者不响static unsigned char th0;
static unsigned char tl0;//buzzer的初始化
//初始化表示默认情况下是不响的
void buzzer_init();//让蜂鸣器开始响
void buzzer_start(void);//让蜂鸣器停止响
void buzzer_stop(void);//设置蜂鸣器响的频率
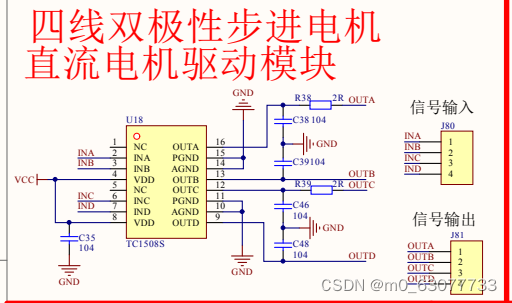
void buzzer_freq_set(unsigned char tmp);#endif九、步进电机
1.接线和原理图
步进电机(四线双极性)P1.0---P1.3
A+---》P2.0
A- ----》P2.1
B+---》P2.2
B- ---》p2.3
2.代码的移植
motor.c
#include"motor.h"//让步进电机转
//双向四拍
void motor_alarm_once(void){//双相四拍 A/B AB AB/ A/B//*正序旋转逆序就是将节拍反过来*/unsigned int cnt=3000;//表示3000个节拍while(cnt--){//第一拍: [A/B AB AB/ A/B/]// 1 0 0 0APositive=0;ANegative=1;BPositive=1; BNegative=0; delay(TIME);//第二拍: [A/B AB AB/ A/B/]// 0 1 0 0APositive=1;ANegative=0;BPositive=1; BNegative=0; delay(TIME);//第3拍: [A/B AB AB/ A/B/]// 0 0 1 0APositive=1;ANegative=0;BPositive=0; BNegative=1; delay(TIME);//第4拍: [A/B AB AB/ A/B/]// 0 0 0 1APositive=0;ANegative=1;BPositive=0; BNegative=1; delay(TIME);}}
motor.h
#ifndef __MOTOR__H__
#define __MOTOR__H__#include<reg51.h>//接线定义
sbit APositive =P1^0;//A+
sbit ANegative =P1^1;//A-
sbit BPositive =P1^2;//B+
sbit BNegative =P1^3;//B-//延时时间
//延时时间越短,转速越快
//TIME宏定义步进电机的转速
#define TIME 30static void delay(unsigned char i){ //i越大,延迟时间越大unsigned char a,b;for(a=i;a>0;a--){for(b=240;b>0;b--);}
}//motor报警接口
//调用该函数导致步进电机转3000个节拍进行报警一次
void motor_alarm_once(void);#endif十、矩阵按键
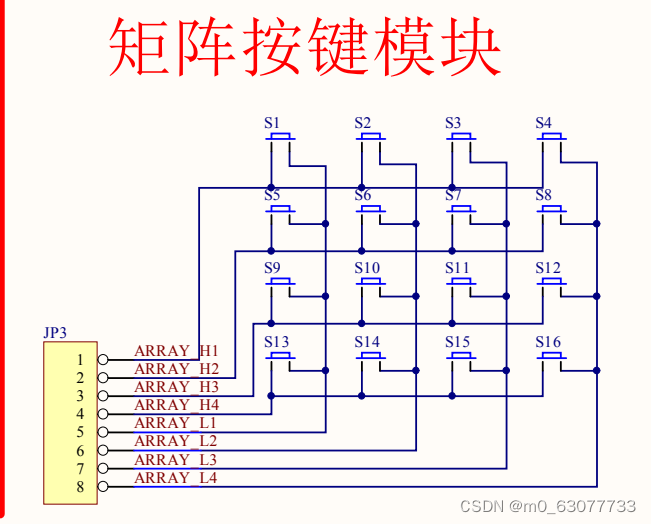
1.接线和原理图
4*4按键 P2

2.代码移植
1.Lcd1602_showInt
因为我们要在1602中显示,所以要定义一个函数来显示0-16
lcd1602.c
// 实现一个子函数,将十进制的2位整数转成一个字符串
void Int2Str2(unsigned int dat, unsigned char str[], unsigned char index)
{unsigned char c = 0;// 假设dat=17c = dat / 10; // c = 1str[index+0] = c + '0'; // 第1位入库dat %= 10; // dat = 7c = dat / 1; // c = 7str[index+1] = c + '0'; // 第2位入库
}
//在LCD上显示1-16之间的数字【矩阵按键】
void LcdShowInt(unsigned char x,unsigned char y,unsigned char value){//第一步:将int转换为字符串strunsigned char str[3]={0};Int2Str2(value,str,0);str[2]='\0'; //这句话可有可无//显示strLcdShowStr(x, y, str);
}
2.代码移植
#include"key.h"//调用该函数后会去进行按键扫描,如果没有人按按键则返回0
//如果有人按下按键,则返回按键的键值
unsigned char GetKey(void){//定义行列unsigned char hang=0,lie=0;//显示当前按下的按键的键值unsigned char keyvalue=0;//第一步:先给keyvalue赋一个初值,才知道是否有被按下KEY=0x0f;//判断行是否有被按下if(KEY!=0x0f){//说明此时有行被按下//消除抖Delay10ms();//算出行号switch(KEY){case 0x0e:hang=1; break;case 0x0d:hang=2; break;case 0x0b:hang=3; break;case 0x07:hang=4; break;default:break;}}//【第二回合第1步】KEY=0xf0;if(KEY!=0xf0){Delay10ms();//1.算出列号switch(KEY){case 0xe0:lie=1; break;case 0xd0:lie=2; break;case 0xb0:lie=3; break;case 0x70:lie=4; break;default:break;}//经过2个回合后hang和lie都知道了,然后根据hang和lie计算出键值//(行-1)*4+列=键值keyvalue=(hang-1)*4+lie;return keyvalue;}return 0;}#ifndef __KEY__H__
#define __KEY__H__
#include<reg51.h>//4*4矩阵按键,接线上使用P1端口
#define KEY P1static void Delay10ms() //@11.0592MHz
{unsigned char i, j;i = 108;j = 145;do{while (--j);} while (--i);
}//调用该函数后会去进行按键扫描,如果没有人按按键则返回0
//如果有人按下按键,则返回按键的键值
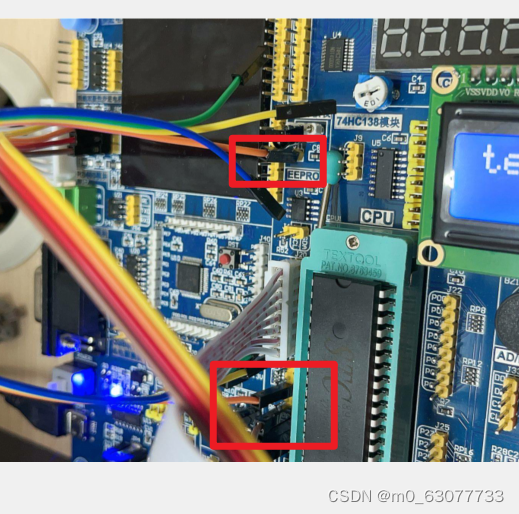
unsigned char GetKey(void);#endif//测试按键 unsigned char key=0;InitLcd1602();//LcdShowStr(0,0,"temp=");LcdShowInt(0,0,0);while(1){key=GetKey();//因为有可能没有得到键值if(key!=0){//如果为0,表示没有按下按键LcdShowInt(0,0,key);}}十一、引脚冲突解决
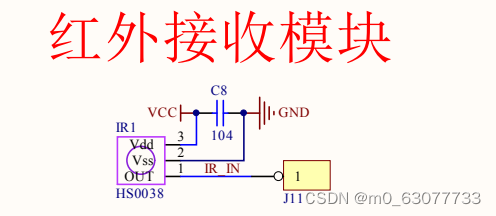
十二、红外遥控器
1.接线和原理图
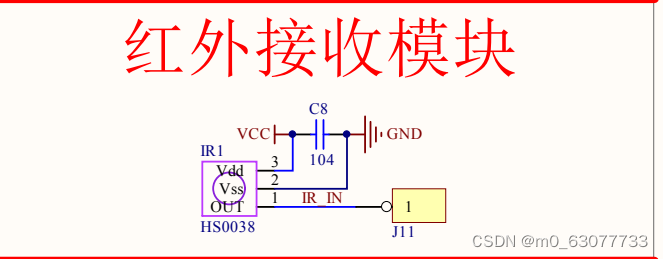
2.代码移植
ir.h
#ifndef __IR_H__
#define __IR_H__#include <reg51.h>// IR使用的引脚定义
sbit IRIN = P3^2;// 外部全局变量声明
// IrValue的0-3用来放原始数据,4用来放经过校验确认无误的键值
extern unsigned char IrValue[5];// 外部接口定义// IR的初始化
void IrInit(void);#endifir.c
#include "ir.h"unsigned char IrValue[5]; // IrValue的0-3用来放原始数据,4用来放经过校验确认无误的键值
static unsigned char Time;void IrInit(void)
{IT0=1;//下降沿触发EX0=1;//打开中断0允许EA=1; //打开总中断IRIN=1;//初始化端口
}static void DelayMs(unsigned int x) //0.14ms误差 0us
{unsigned char i;while(x--){for (i = 0; i<13; i++){}}
}void ReadIr() interrupt 0
{unsigned char j,k;unsigned int err;Time = 0; DelayMs(40); // 136us*40if (IRIN == 0) //确认是否真的接收到正确的信号{ err = 1000; //1000*10us=10ms,超过说明接收到错误的信号/*当两个条件都为真时循环,如果有一个条件为假的时候跳出循环,免得程序出错的时侯,程序死在这里*/ while ((IRIN==0) && (err>0)) //等待前面9ms的低电平过去 { DelayMs(1); // 136userr--;} if (IRIN == 1) //如果正确等到9ms低电平{err = 500;while ((IRIN==1) && (err>0)) //等待4.5ms的起始高电平过去{DelayMs(1);err--;}for (k=0; k<4; k++) //共有4组数据{ for (j=0; j<8; j++) //接收一组数据{err = 60; while ((IRIN==0) && (err>0))//等待信号前面的560us低电平过去{DelayMs(1);err--;}err = 500;while ((IRIN==1) && (err>0)) //计算高电平的时间长度。{DelayMs(1);//0.14msTime++;err--;if (Time > 30){EX0 = 1;return;}}IrValue[k] >>= 1; //k表示第几组数据if (Time >= 8) //如果高电平出现大于565us,那么是1{IrValue[k] |= 0x80;}Time = 0; //用完时间要重新赋值 }}}if (IrValue[2] == ~IrValue[3]){IrValue[4] = IrValue[2];return;}}
}3.优化
我们在上面代码红外是使用了中断,在中断的过程中是属于销毁大量时间,所以我们不使用中断
第一步:用中断的方式来解码红外接收,完成
第二步:因为中断接收红外的时间太长,所以和别的模块容易产生冲突?怎么办?
解决方法:在外面(不在isr)进行延时并接收红外的一帧数据,不在中断中做。
难点和问题:
1.中断还要不要?因为红外遥控器信号是异步的,所以必须用中断来处理
2.但是完整接收时间又太长不能都放在中断中,所以我们在中断中启动接收开个头,然后交给外部去做整个接收工作
3.外部做的时候精确延时函数的实现是关键,不能用delay方式,而是用是定时器来实现的,最后总结:其实这里很麻烦
十三、项目功能梳理和定义
1.功能规划
(1)默认情况下显示时间和温度
(2)温度阈值显示及调整:不同用户想要调整的不一样
(3)温度超过阈值后报警
(4)时间调整
(5)扩展功能:闹钟
2.细节实现
1.时间和温度显示的格式
T:24.5-37.9
20231015-194812
2.调节方式
(1)在LCD1602上显示设置一个光标,显示分2种模式,常规模式和调整模式。常规模式下没有光标显示,调整模式下有一个光标,光标闪烁落在哪一个格子,就是要调整哪一个格子内容。
(2)按键中有一个模式切换键(比如定义键值为的按键),默认是普通模式,按一下切换为调整模式,再按切换回普通模式。
(3)调整模式下光标的移动要靠按键,按键中有4个按键分别为上下左右。
(4)当光标落在某一个格子上时候,按下+或者-按键,数字会加1或者减1处理
3.闹钟功能实现
方式一【硬件闹钟】:类似于DS1302【有时间寄存器】(询问式)
方式二【软件闹钟】:软件要再很短的时间对固定位置去查询(轮询方式)
十四、LCD1602实现按键控制光标移动和闪烁
1.控制光标是否显示和闪烁

//设置LCD到常规模式(不显示光标)
void Lcd_normal_mode(void){Lcd1602_Write_Cmd(0x0c);//打开显示并且无光标
}//设置LCD到调整模式(显示光标,并且光标闪烁)
void Lcd_adjust_mode(void){Lcd1602_Write_Cmd(0x0f);//打开显示并且光标闪烁
}
2.设置光标初始化
设置光标显示的位置

3.按键控制工作模式
因为按键控制着LCD,但是又不能再LCD或者Key里面直接写。所以再单独写一个。
C语言的按位取反【!和~】

c语言中!与~的区别_c语言~和!-CSDN博客
工作模式的切换初值
定义:keyvalue=1时候,这个按键定义为模式调整按键
//调用该函数后会去进行按键扫描,如果没有人按按键则返回0
//如果有人按下按键,则返回按键的键值
unsigned char GetKey(void){//定义行列unsigned char hang=0,lie=0;//显示当前按下的按键的键值unsigned char keyvalue=0;//第一步:先给keyvalue赋一个初值,才知道是否有被按下KEY=0x0f;//判断行是否有被按下if(KEY!=0x0f){//说明此时有行被按下//消除抖Delay10ms();//算出行号switch(KEY){case 0x0e:hang=1; break;case 0x0d:hang=2; break;case 0x0b:hang=3; break;case 0x07:hang=4; break;default:break;}}//【第二回合第1步】KEY=0xf0;if(KEY!=0xf0){Delay10ms();//1.算出列号switch(KEY){case 0xe0:lie=1; break;case 0xd0:lie=2; break;case 0xb0:lie=3; break;case 0x70:lie=4; break;default:break;}//经过2个回合后hang和lie都知道了,然后根据hang和lie计算出键值//(行-1)*4+列=键值keyvalue=(hang-1)*4+lie;return keyvalue;}return 0;}adjustmode.c
//workMode表示工作模式,为0表示常规模式,1表示调整模式
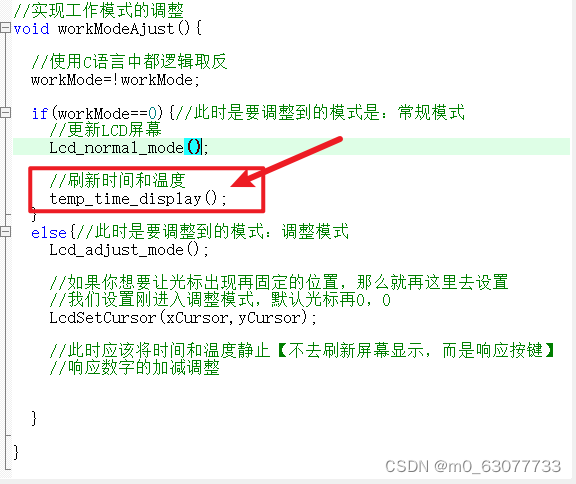
static unsigned char workMode=0;//实现工作模式的调整
void workModeAjust(){//使用C语言中都逻辑取反workMode=!workMode;if(workMode==0){//此时是要调整到的模式是:常规模式Lcd_normal_mode();}else{//此时是要调整到的模式:调整模式Lcd_adjust_mode();//如果你想要让光标出现再固定的位置,那么就再这里去设置}}//调用Key中GetKey
void KeyWorkModeAjust(){unsigned char key=GetKey();if(key==1){//如果按下”0“则表示要进行调整workModeAjust();}
}main.c
unsigned char key=0;InitLcd1602();LcdShowStr(0,0,"temp=");while(1){KeyWorkModeAjust();}按键不灵敏
我们上面功能实现后,通过按键控制是否显示光标明显显示过慢。可能要按好几次才可以出现或者销毁光标。
思路:我们从结果可以知道其实是可以转换模式,但是就是时间上有问题。说明我们刚刚实现的[adjustmode.c]是没有问题的,所以问题可能出现再调用的Getkey。GetKey获取时间很快【100-200us】,但是我们手动按下时间可能赶不上GetKey的执行
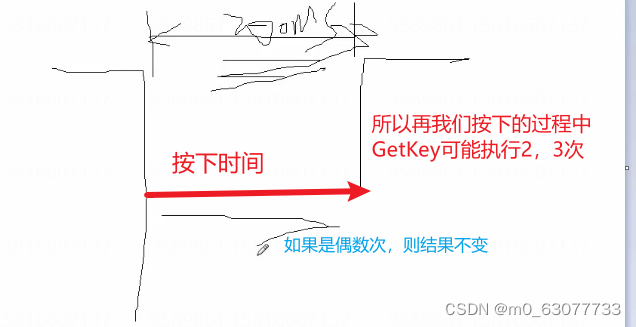
解决方法:
我们预估人按键按下是需要400ms,原程序执行速度可能需要100ms左右,所以我们加上一个延时300ms左右的函数。使得按下按键一次,程序就检测1次
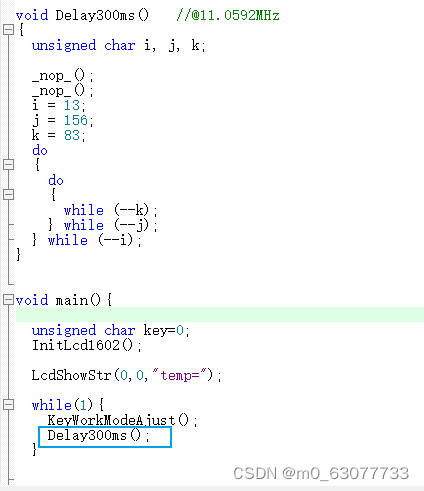
但是此时我测试时候,不加延时函数才可以正确显示。但是加上延时函数反而不正确
4.光标移动
绝对坐标系,相对坐标系
setCursor是绝对坐标系
但是我们要使用到的是相对坐标系,所以我们要先读取原来的x和y。
记录原始坐标
使用全局变量,并且再刚刚进入调整模式下,设置默认的坐标位置
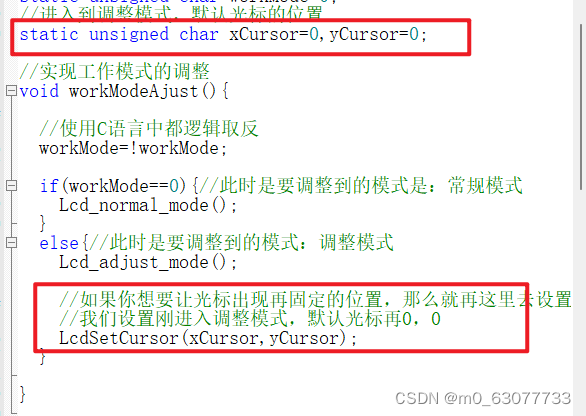
//进入到调整模式,默认光标的位置
static unsigned char xCursor=0,yCursor=0;//实现工作模式的调整
void workModeAjust(){//使用C语言中都逻辑取反workMode=!workMode;if(workMode==0){//此时是要调整到的模式是:常规模式Lcd_normal_mode();}else{//此时是要调整到的模式:调整模式Lcd_adjust_mode();//如果你想要让光标出现再固定的位置,那么就再这里去设置//我们设置刚进入调整模式,默认光标再0,0LcdSetCursor(xCursor,yCursor);}}控制光标
//进入到调整模式,默认光标的位置
static unsigned char xCursor=0,yCursor=0;//实现工作模式的调整
void workModeAjust(){//使用C语言中都逻辑取反workMode=!workMode;if(workMode==0){//此时是要调整到的模式是:常规模式Lcd_normal_mode();}else{//此时是要调整到的模式:调整模式Lcd_adjust_mode();//如果你想要让光标出现再固定的位置,那么就再这里去设置//我们设置刚进入调整模式,默认光标再0,0LcdSetCursor(xCursor,yCursor);}}//检测按键,并且根据按键来移动光标
//该模式只再调整模式下有效果
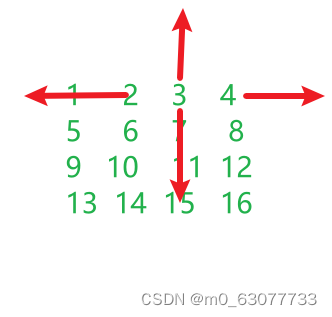
void KeyCursorMove(void){//第一步:先获取键值unsigned char key=GetKey();//判断键值,选择方向switch(key){//上,下case 3:if(yCursor==0){yCursor++;}else{yCursor--;}break;//左case 2:if(xCursor==0){xCursor=15;//将光标从最左边移动到最右边}else{xCursor-=1;}LcdSetCursor(xCursor,yCursor);break;//右case 4:if(xCursor==15){xCursor=0;//将光标从最左边移动到最右边}else{xCursor+=1;}LcdSetCursor(xCursor,yCursor);break;//无关按键default:break;}}// 本函数用来设置当前光标位置,其实就是设置当前正在编辑的位置,
// 其实就是内部的数据地址指针,其实就是RAM显存的偏移量
// x范围是0-15,y=0表示上面一行,y=1表示下面一行
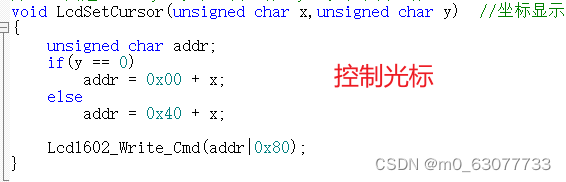
void LcdSetCursor(unsigned char x,unsigned char y) //坐标显示
{unsigned char addr;if(y == 0)addr = 0x00 + x;elseaddr = 0x40 + x;Lcd1602_Write_Cmd(addr|0x80);
}十五、程序流程梳理及其基本显示功能实现
1.程序流程梳理
1.按键获取与其他代码的合理安排
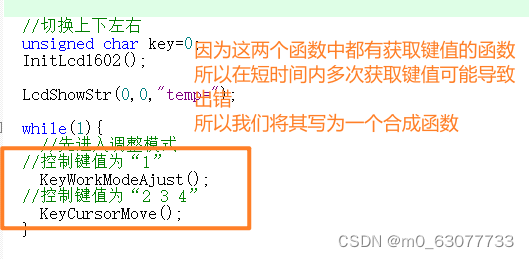
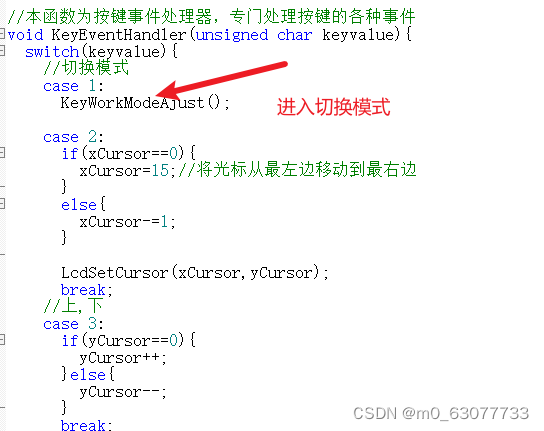
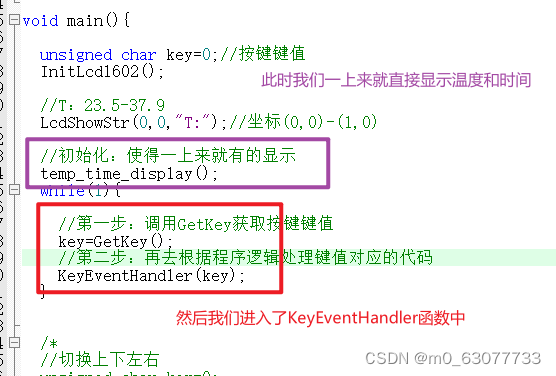
//本函数为按键事件处理器,专门处理按键的各种事件
void KeyEventHandler(unsigned char keyvalue){switch(keyvalue){//切换模式case 1:KeyWorkModeAjust();case 2:if(xCursor==0){xCursor=15;//将光标从最左边移动到最右边}else{xCursor-=1;}LcdSetCursor(xCursor,yCursor);break;//上,下case 3:if(yCursor==0){yCursor++;}else{yCursor--;}break;//左//右case 4:if(xCursor==15){xCursor=0;//将光标从最左边移动到最右边}else{xCursor+=1;}LcdSetCursor(xCursor,yCursor);break;//无关按键default:break;}}unsigned char key=0;//按键键值InitLcd1602();LcdShowStr(0,0,"temp=");while(1){//第一步:调用GetKey获取按键键值key=GetKey();//第二步:再去根据程序逻辑处理键值对应的代码KeyEventHandler(key);}2.一个单片机程序只有且只能有一个主程序
2.基本显示功能的实现
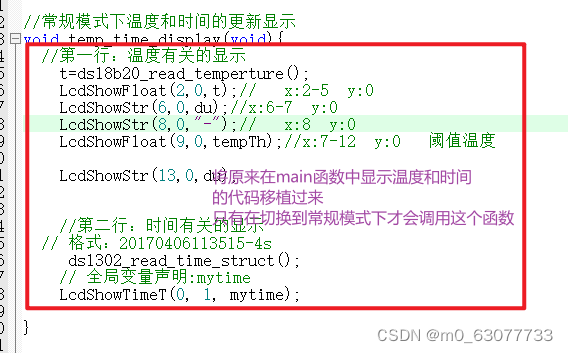
(1)温度显示
double t;//存温度值unsigned char key=0;//按键键值InitLcd1602();//T:23.5-37.9LcdShowStr(0,0,"T:");//坐标(0,0)-(1,0)while(1){//第一行:温度有关的显示t=ds18b20_read_temperture();LcdShowFloat(2,0,t);// x:2-5 y:0LcdShowStr(6,0,du);//x:6-7 y:0LcdShowStr(8,0,"-");// x:8 y:0LcdShowStr(13,0,du);}(2)阈值温度显示
(3)时间显示
//第二行:时间有关的显示// 格式:20170406113515-4sds1302_read_time_struct();// 全局变量声明:mytimeLcdShowTimeT(0, 1, mytime);(4)完整测试代码
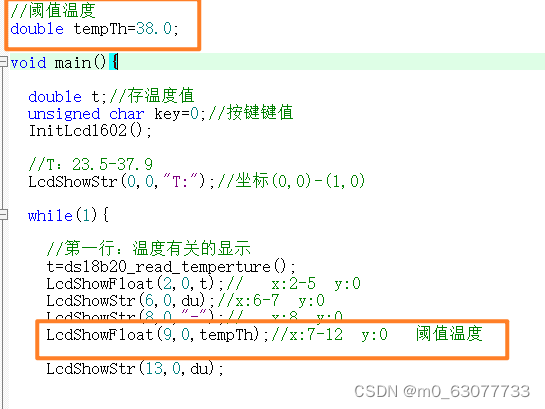
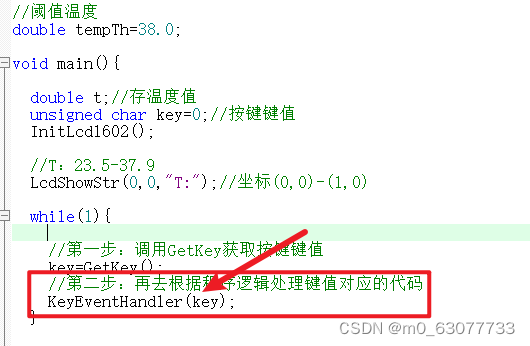
//阈值温度
double tempTh=38.0;void main(){double t;//存温度值unsigned char key=0;//按键键值InitLcd1602();//T:23.5-37.9LcdShowStr(0,0,"T:");//坐标(0,0)-(1,0)while(1){//第一行:温度有关的显示t=ds18b20_read_temperture();LcdShowFloat(2,0,t);// x:2-5 y:0LcdShowStr(6,0,du);//x:6-7 y:0LcdShowStr(8,0,"-");// x:8 y:0LcdShowFloat(9,0,tempTh);//x:7-12 y:0 阈值温度LcdShowStr(13,0,du);//第二行:时间有关的显示// 格式:20170406113515-4sds1302_read_time_struct();// 全局变量声明:mytimeLcdShowTimeT(0, 1, mytime);//第一步:调用GetKey获取按键键值key=GetKey();//第二步:再去根据程序逻辑处理键值对应的代码KeyEventHandler(key);}3.bug
1.代码调整
上面的测试代码有问题
问题:如果我们从基本模式---》调整模式【那我们的时间应该定住不能动】
我们从调整模式---》基本模式【那么时间应该按照修改后的去动】
代码逐层递进,发现我们应该在

2.程序运行逻辑
1)由常规模式--》调整模式
a)停止温度和时间的刷新(此时LCD1602上显示的内容就是刚才正在显示的)
b)响应按键事件(主要有2种:2,3,4按键是调整光标位置;5,6按键是调整光标所在位置的数字加减)
2)由调整模式--》常规模式
a)恢复温度和时间的刷新
b)停止响应按键2,3,4,5,6,只能响应按键1.同时要把刚才调整模式下左做的调整结果生效(比如温度阈值变化了要更新,比如时间调整了要写入ds1302内部去生效)
3.要在按键前先判断当前处于哪一个模式下
只有在进入调整模式下才可以调节2,3,4
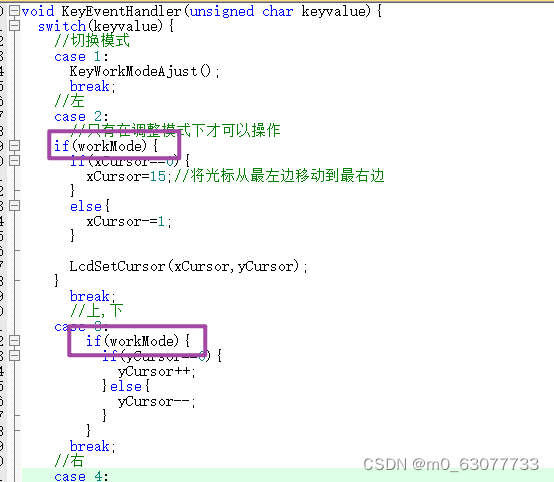
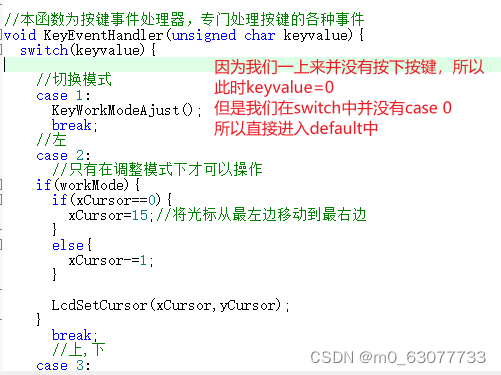
//本函数为按键事件处理器,专门处理按键的各种事件
void KeyEventHandler(unsigned char keyvalue){switch(keyvalue){//切换模式case 1:KeyWorkModeAjust();break;//左case 2://只有在调整模式下才可以操作if(workMode){if(xCursor==0){xCursor=15;//将光标从最左边移动到最右边}else{xCursor-=1;}LcdSetCursor(xCursor,yCursor);}break;//上,下case 3:if(workMode){if(yCursor==0){yCursor++;}else{yCursor--;}}break;//右case 4:if(workMode){if(xCursor==15){xCursor=0;//将光标从最左边移动到最右边}else{xCursor+=1;}LcdSetCursor(xCursor,yCursor);}break;//加:case 5:if(workMode){}//减:case 6:if(workMode){}//无关按键default:break;}}4.初入显示的调整
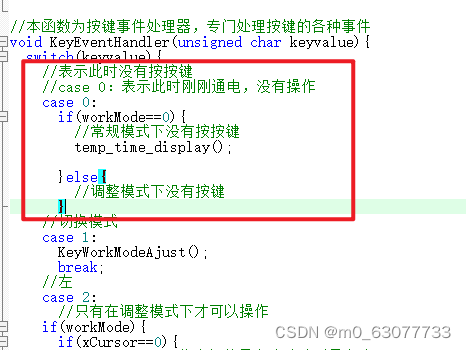
此时进入default中时间和温度并不会变化
所以我们应该switch加case 0:并在里面调用刷新温度和时间的函数
十六、数字加减
1.分析
1. 设置xCursor和yCursor的位置
是否会超出范围
2.提取全局的阈值
//处理数字加1和减1的问题
//isAdd为0时减1,isAdd为1时加1
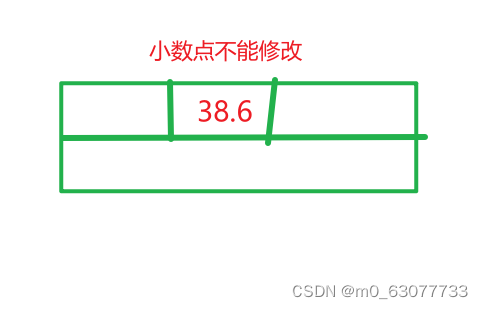
void NumAddSub(unsigned char isAdd){//第一步:要判断当前的光标位置是否合法//第二步:根据xCursor和yCursor来判断当前光标在哪一个值上//LcdShowFloat(9,0,tempTh);//x:7-12 y:0 阈值温度if(yCursor==0){//上一行,显示温度if(xCursor==7){//十位if(isAdd){//此时isAdd=1表示要加1tempTh+=10;}else{tempTh-=10;}}else if(xCursor==8){//个位if(isAdd){//此时isAdd=1表示要加1tempTh+=1;}else{tempTh-=1;}}else if(xCursor==10){//小数点后面一位if(isAdd){//此时isAdd=1表示要加1tempTh+=0.1;}else{tempTh-=0.1;}}}//用户按下5,6按键调整之后进行更新LcdShowFloat(9,0,tempTh);//x:7-12 y:0
} 
2.问题解决
1.修改值后,光标移动

解决方法:

2.按一下,跳动很多格子
在每一个case后面加上delay