| 文献阅读笔记 | ||
| 简介 | 题目 | Learning a Deep Compact Image Representation for Visual Tracking |
| 作者 | N Wang, DY Yeung | |
| 原文链接 | Learning a Deep Compact Image Representation for Visual Tracking (neurips.cc) | |
| 关键词 | Object tracking、DLT、SDAE | |
| 研究问题 | tracking the trajectory of a moving object in a video with possibly very complex background 在尽可能复杂背景的视频中跟踪目标的移动轨迹 | |
| 研究方法 | DLT:deep learning tracker 试图结合生成性跟踪器和判别性跟踪器的思想,开发一个鲁棒的判别性跟踪器。 更强调无监督的特征学习问题; Specifically, by using auxiliary natural images, we train a stacked denoising autoencoder (SDAE) offline to learn generic image features that are more robust against variations. 通过使用辅助的自然图像,我们离线训练一个堆叠的去噪自编码器,以学习对变化更稳定的通用图像特征。 This is then followed by knowledge transfer from offline training to the online tracking process. 随后是知识转移从线下培训到线上跟踪的过程。 Online tracking involves a classification neural network which is constructed from the encoder part of the trained autoencoder as a feature extractor and an additional classification layer. 在线跟踪涉及一个分类神经网络,该网络由训练好的自编码器的编码器部分作为特征提取器和一个额外的分类层构建而成。 Both the feature extractor and the classifier can be further tuned to adapt to appearance changes of the moving object. 特征提取器和分类器都可以进行进一步的调整以适应移动对象的外观变化。 | |
| 研究结论 | 相比其他跟踪器,在保持低计算成本和实时性的情况下更准确 | |
| 创新不足 | it would be an interesting direction to investigate a shift-variant CNN. 目前的跟踪器中的分类层只是一个线性分类器。将其扩展到更强大的分类器中,就像在其他判别跟踪器中一样,可能会为进一步的性能提升提供更大的空间。 | |
| 额外知识 | 生成式和判别式方法: 生成式:假设被跟踪的对象可以用某种生成式过程来描述,因此跟踪相当于在可能无限多的候选对象中找到最可能的候选对象。关键是开发更加稳定的图像表示。灵感来源于robust estimation and sparse coding,such as the alternating direction method of multipliers (ADMM) and accelerated gradient methods。Some popular generative trackers include incremental visual tracking (IVT) , which represents the tracked object based on principal component analysis (PCA), and the l1 tracker (L1T)。 判别式:,判别式方法将跟踪视为一个二分类问题,学习将被跟踪对象与其背景明确区分开来。Some representative trackers in this category are the online AdaBoost (OAB) tracker [6], multiple instance learning (MIL) tracker [3], and structured output tracker (Struck). 对比:由于使用了更丰富的图像表示,生成式跟踪器通常在较不复杂的环境下产生更准确的结果,而判别式跟踪器由于明确地将背景考虑在内,因此对强遮挡和变化具有更强的鲁棒性。 The particle filter framework:粒子滤波框架 一种基于序列观测值估计动力系统潜在状态变量的序贯蒙特卡洛重要性采样方法。它通过一组粒子来近似后验状态分布,而不仅仅是像模式这样的单点。对于视觉跟踪而言,这一特性使得跟踪器更容易从错误的跟踪结果中恢复 Kalman filter卡尔曼滤波: 比较先进的跟踪器:MTT, CT , VTD , MIL, a latest variant of L1T, TLD, and IVT. | |
(论文阅读22/100)Learning a Deep Compact Image Representation for Visual Tracking
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/189359.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

AI:76-基于机器学习的智能城市交通管理
🚀 本文选自专栏:AI领域专栏 从基础到实践,深入了解算法、案例和最新趋势。无论你是初学者还是经验丰富的数据科学家,通过案例和项目实践,掌握核心概念和实用技能。每篇案例都包含代码实例,详细讲解供大家学习。 📌📌📌在这个漫长的过程,中途遇到了不少问题,但是…

asp.net外卖网站系统VS开发mysql数据库web结构c#编程Microsoft Visual Studio
一、源码特点 asp.net外卖网站系统 是一套完善的web设计管理系统,系统采用mvc模式(BLLDALENTITY)系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为vs2010,数据库为mysql,使用c#语…

【Unity之UI编程】玩法面板的实现
👨💻个人主页:元宇宙-秩沅
👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅!
👨💻 本文由 秩沅 原创
👨💻 收录于专栏:UI_…
Spring Cloud和Kubernetes + Spring Boot 用哪个?
Spring Cloud和Kubernetes Spring Boot都是用于构建微服务架构的解决方案,它们各有优势和不足,选择哪个更好取决于你的具体需求和上下文。
Spring Cloud是一个基于Spring Boot的微服务开发框架,它提供了一套完整的微服务解决方案࿰…
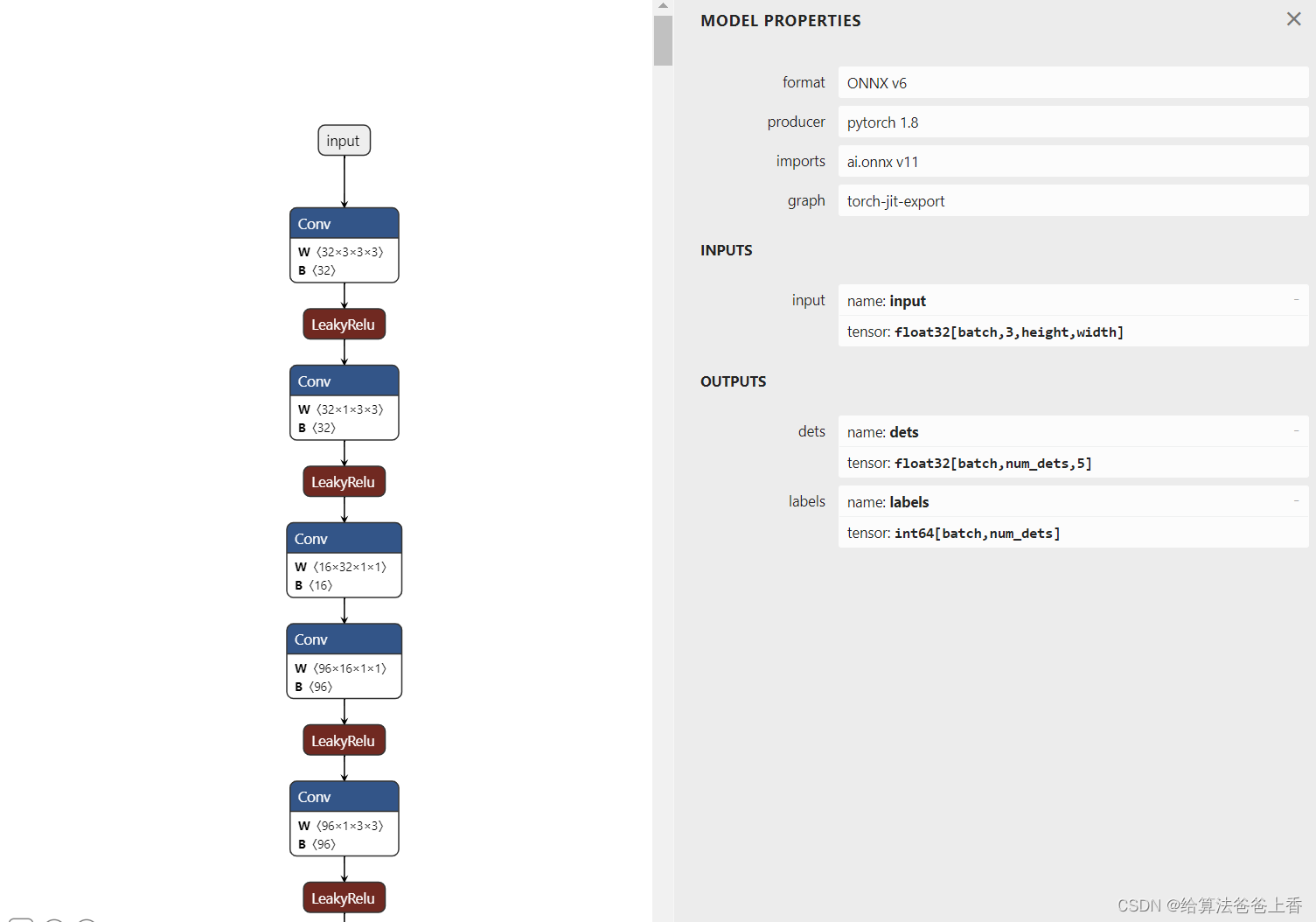
OpenMMlab导出yolov3的onnx模型并推理
手动导出
直接使用脚本
import torch
from mmdet.apis import init_detector, inference_detectorconfig_file ./configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py
checkpoint_file yolov3_mobilenetv2_mstrain-416_300e_coco_20210718_010823-f68a07b3.pth
mod…
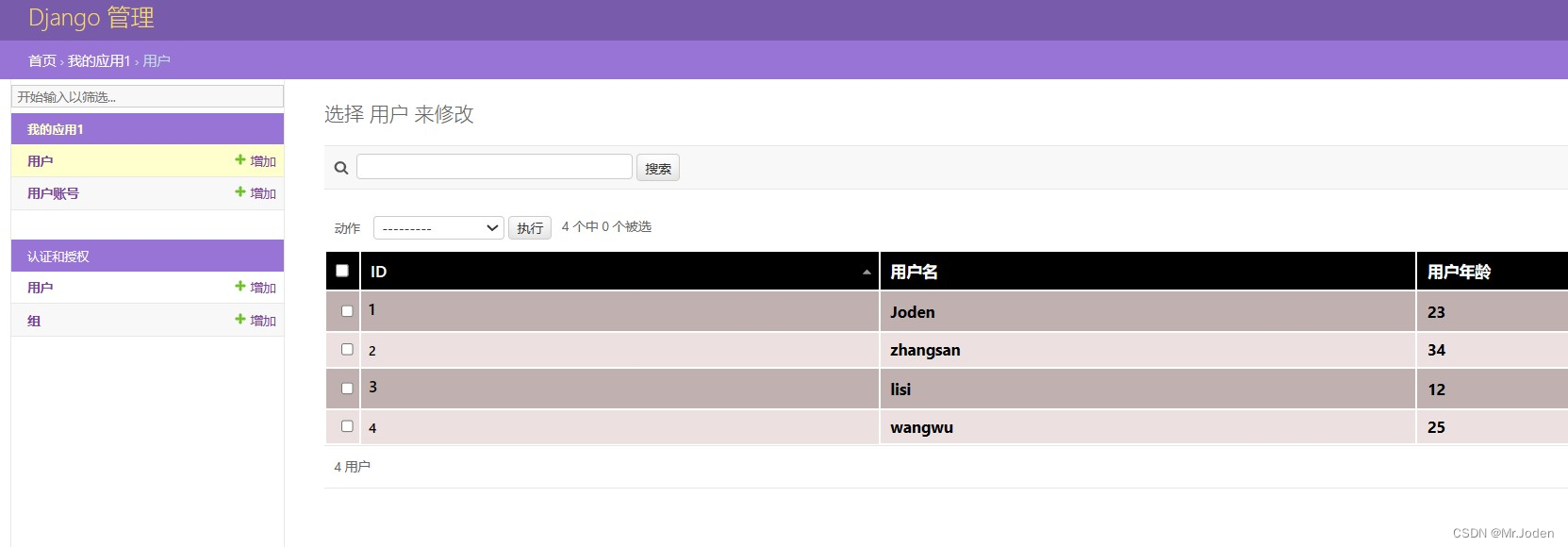
Django(复习篇)
项目创建
1. 虚拟环境
python -m venv my_env
cd my_env
activate/deactivate
pip install django
2. 项目和app创建
cd mypros
django-admin startproject Pro1
django-admin startapp app1
3. settings配置INSTALLED_APPS【app1"】TEMPLATES【 DIRS: [os.pat…
JavaEE初阶学习:Linux 基本使用和 web 程序部署
1.Linux的基本认识
Linux 是一个操作系统.(搞管理的系统) 和Windows都是同类产品~~
Linux 实际的场景:
1.服务器
2.嵌入式设备
3.移动端(手机)Android 其实就是Linux 1991年,还在读大学的 芬兰人 Linus Benedict Torvalds,搞了一个Linux 这样的系统0.01版,正式发布了~
后…
指标体系:洞察变化的原因
一、指标概述
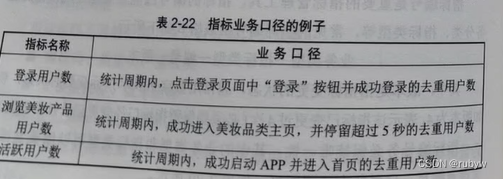
指标体系是指根据运营目标,整理出可以正确和准确反映业务运营特点的多个指标,并根据指标间的联系形成有机组合。 指标体系业务意义极强,所有指标体系都是为特定的业务经营目的而设计的。指标体系的设计应服从于这种目的&#x…
【数据结构】二叉树经典例题---<你真的掌握二叉树了吗?>(第一弹)
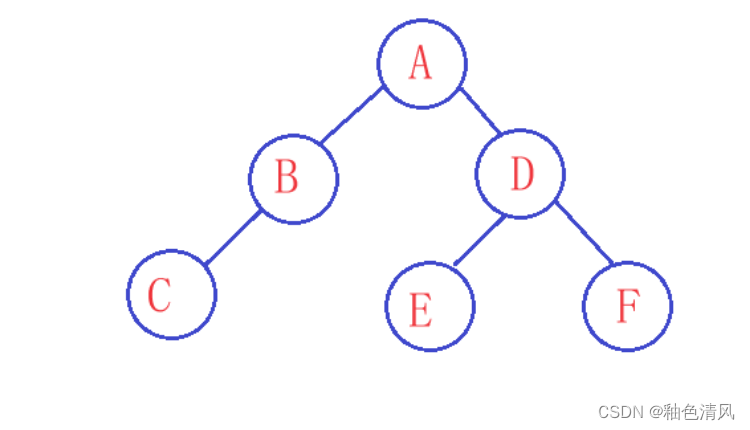
一、已知一颗二叉树如下图,试求: (1)该二叉树前序、中序和后序遍历的结果。 (2)该二叉树是否为满二叉树?是否为完全二叉树? (3)将它转换成对应的树或森林。 (4)这颗二叉树的深度为多少? (5)试对该二叉树进行前序线索化。 (6)试对…

Linux文件系统(1)
Linux文件系统(1) 📟作者主页:慢热的陕西人 🌴专栏链接:Linux 📣欢迎各位大佬👍点赞🔥关注🚓收藏,🍉留言 本博客主要内容从系统层面重新认识我们的文件系统 文…
每日一题(LeetCode)----数组--长度最小的子数组
每日一题(LeetCode)----数组–长度最小的子数组
1.题目( 209.长度最小的子数组)
给定一个含有 n 个正整数的数组和一个正整数 target 。
找出该数组中满足其总和大于等于 target 的长度最小的 连续子数组 [numsl, numsl1, ..., numsr-1, numsr] &…
【入门Flink】- 10基于时间的双流联合(join)
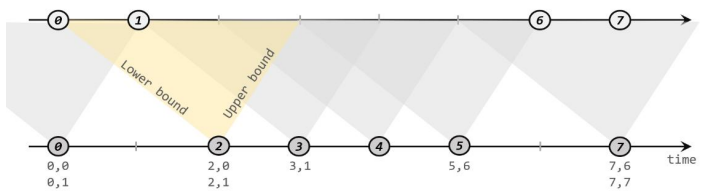
统计固定时间内两条流数据的匹配情况,需要自定义来实现——可以用窗口(window)来表示。为了更方便地实现基于时间的合流操作,Flink 的 DataStrema API 提供了内置的 join 算子。 窗口联结(Window Join)
一…
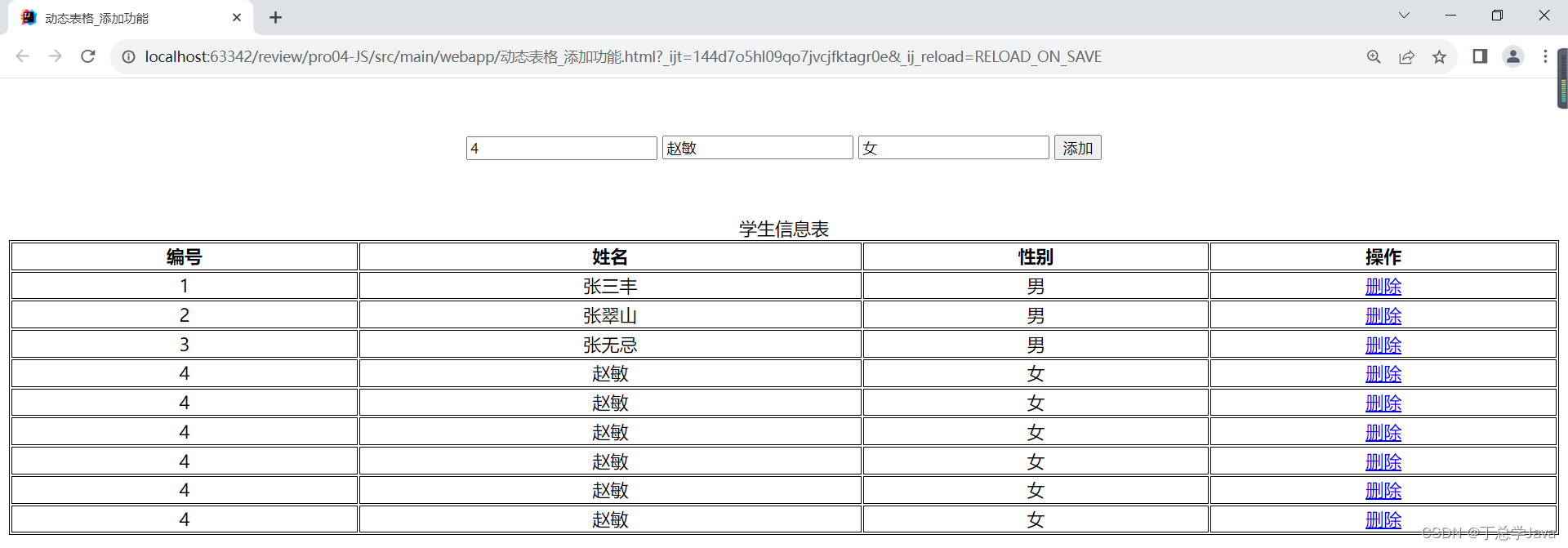
JavaScript_动态表格_添加功能
1、动态表格_添加功能.html <!DOCTYPE html>
<html lang"en">
<head><meta charset"UTF-8"><title>动态表格_添加功能</title><style>table{border: 1px solid;margin: auto;width: 100%;}td,th{text-align: ce…

SOME/IP 协议介绍(四)RPC协议规范
RPC协议规范
本章描述了SOME/IP的RPC协议。
传输协议绑定
为了传输不同传输协议的SOME/IP消息,可以使用多种传输协议。SOME/IP目前支持UDP和TCP。它们的绑定在以下章节中进行了解释,而第[SIP_RPC_450页,第36页]节讨论了选择哪种传输协议。…
【Go入门】面向对象
【Go入门】面向对象
前面两章我们介绍了函数和struct,那你是否想过函数当作struct的字段一样来处理呢?今天我们就讲解一下函数的另一种形态,带有接收者的函数,我们称为method
method
现在假设有这么一个场景,你定义…
Linux驱动开发——PCI设备驱动
目录
一、 PCI协议简介
二、PCI和PCI-e
三、Linux PCI驱动
四、 PCI设备驱动实例
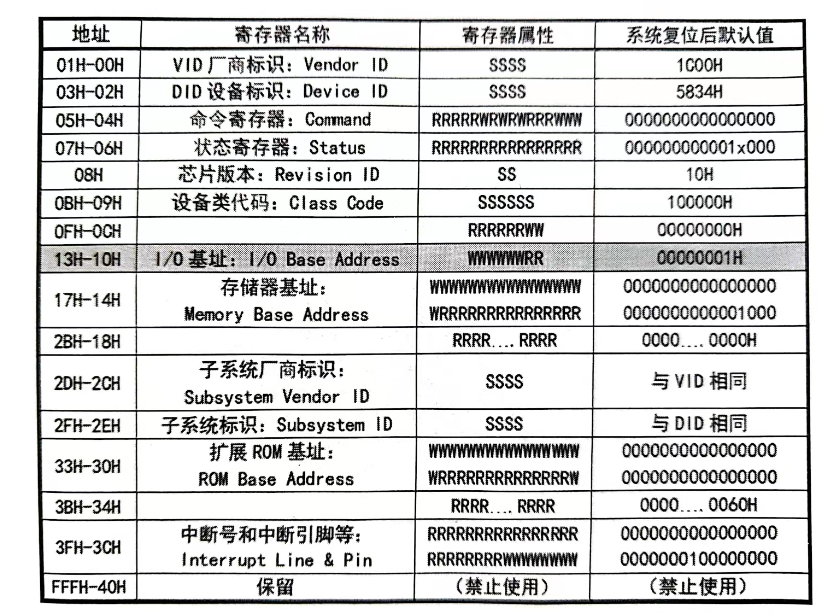
五、 总线类设备驱动开发习题 一、 PCI协议简介 PCI (Peripheral Component Interconnect,外设部件互联) 局部总线是由Intel 公司联合其他几家公司一起开发的一种总线标准&#…
前端开发引入element plus与windi css
背景 前端开发有很多流行框架,像React 、angular、vue等等,本文主要讲vue 给新手用的教程,其实官网已经写的很清楚,这里再啰嗦只是为了给新手提供一个更加简单明了的参考手册。 一、打开element plus官网选则如图所示模块安装命令…
推荐文章
- # Go学习-Day6
- #include <netinet/in.h>
- #Js篇:数组的方法es5和es6
- (03)Hive的相关概念——分区表、分桶表
- (3)图像识别yolov5—训练自定义模型
- (8)揭示Python编程精髓:深潜继承与多态的奇幻之旅
- (c语言)位操作符
- (八)JavaWeb后端开发——Tomcat
- (笔记)第三期书生·浦语大模型实战营(十一卷王场)–书生基础岛第2关---8G 显存玩转书生大模型 Demo
- (笔记)第三期书生·浦语大模型实战营(十一卷王场)–书生基础岛第5关---XTuner 微调个人小助手认知
- (笔记一)利用open_cv在图像上进行点标记,文字注记,画圆、多边形、椭圆
- (超详细)语音信号处理之特征提取