目录
说明:
1. Qt工具箱
日志输出工具:rqt_console
绘制数据曲线:rqt_plot
图像渲染工具:rqt_image_view
综合工具:rqt
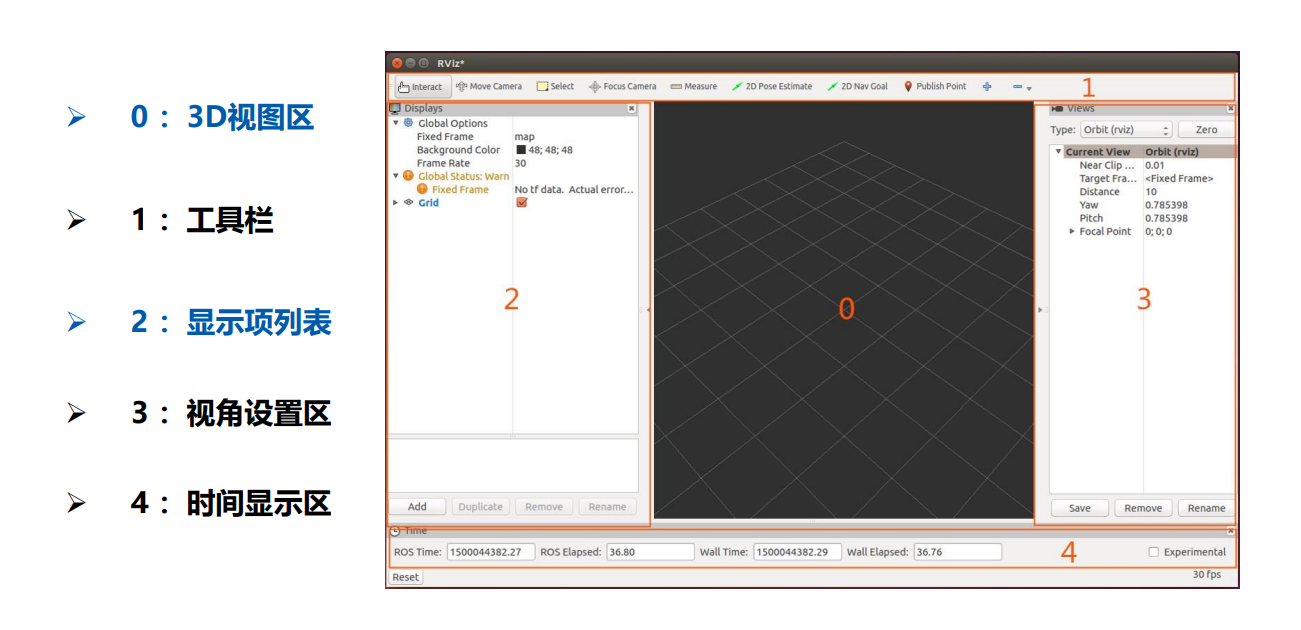
2. 三维可视化工具:Rviz
Rviz启动
使用示例
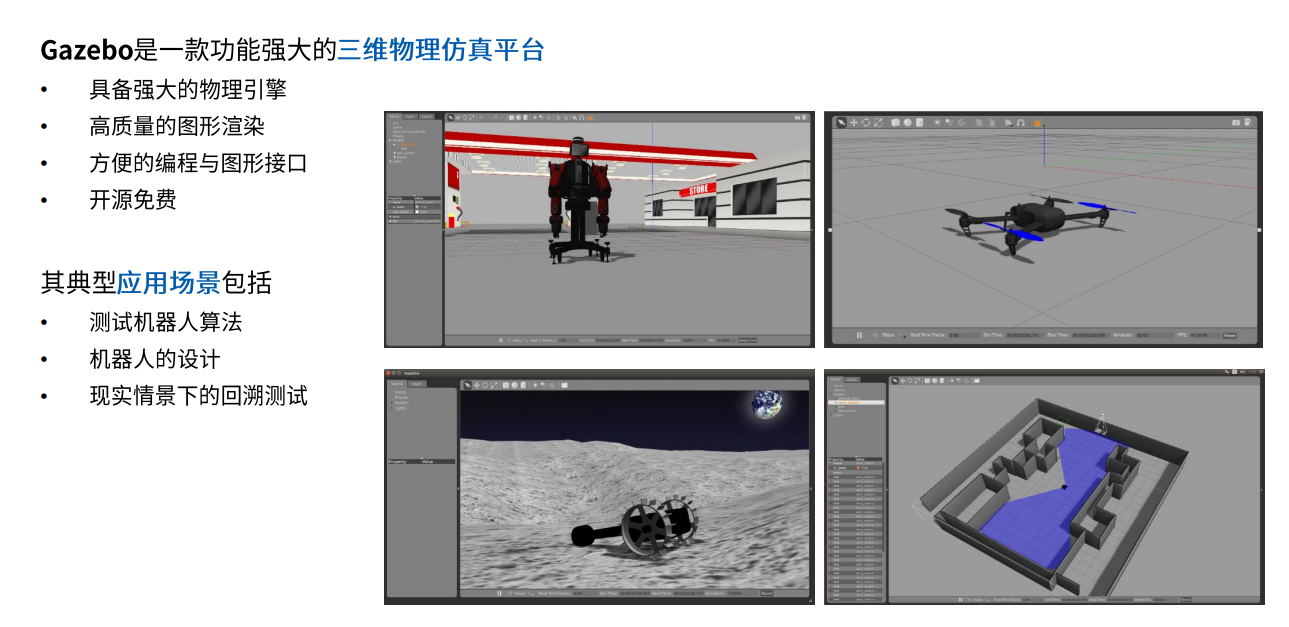
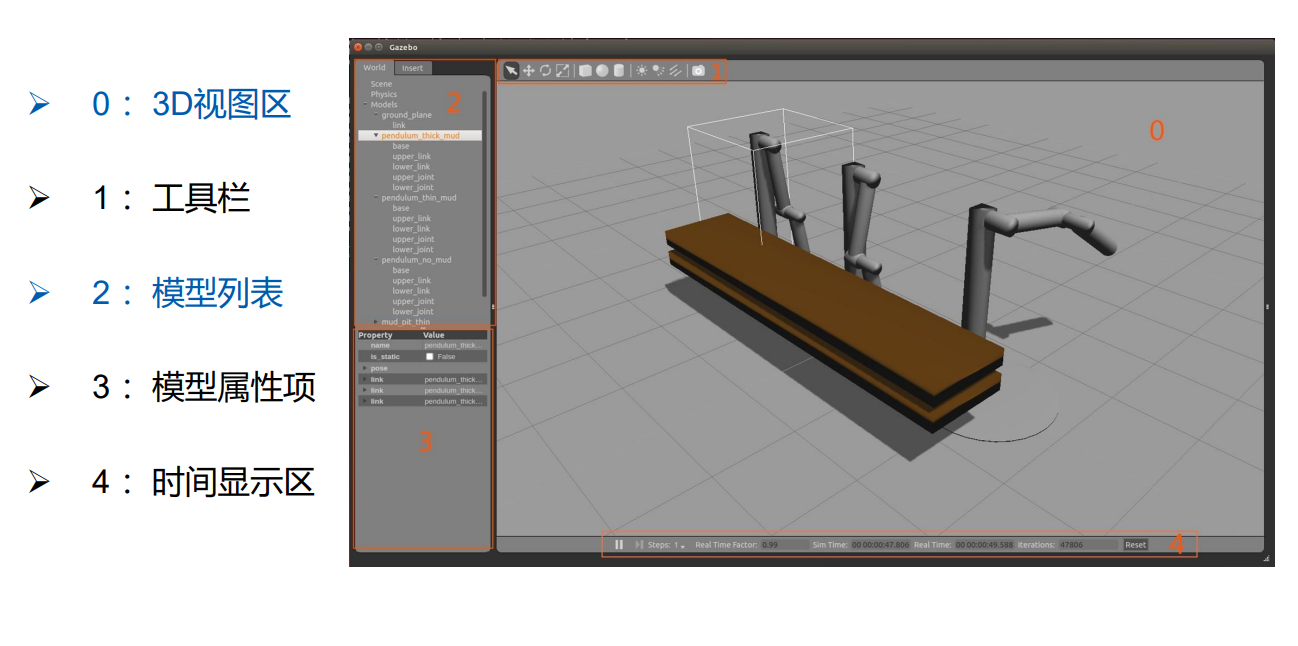
3. 仿真平台:Gazebo
Gazebo启动
模型环境查看
选择模型环境打开
说明:
1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的Ubuntu与ROS系统版本与课程完全一致;
| 虚拟机版本 | Linux系统版本 | ROS系统版本 |
|---|---|---|
| VMware WorkStation Pro 16 | Ubuntu18.04 | Melodic |
2. 课程中的所有示例代码均已跑通,且对Pyhon版本的代码也都做了运行验证,并附带验证过程(错误均已修正);
3. 本节是整个笔记的第18节,对应视频课程的第20节,请自行对应学习;
4. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注, 创作不易,感谢支持!
这一章节介绍一些ROS中常用可视化工具的使用。 在前面的课程中我们曾经简单介绍过ROS中一个可视化工具:计算图,计算图可视化工具指令:rqt_graph 这里将较为详细的介绍一些其它的可视化工具,如:Qt工具箱、Rviz等。
1. Qt工具箱
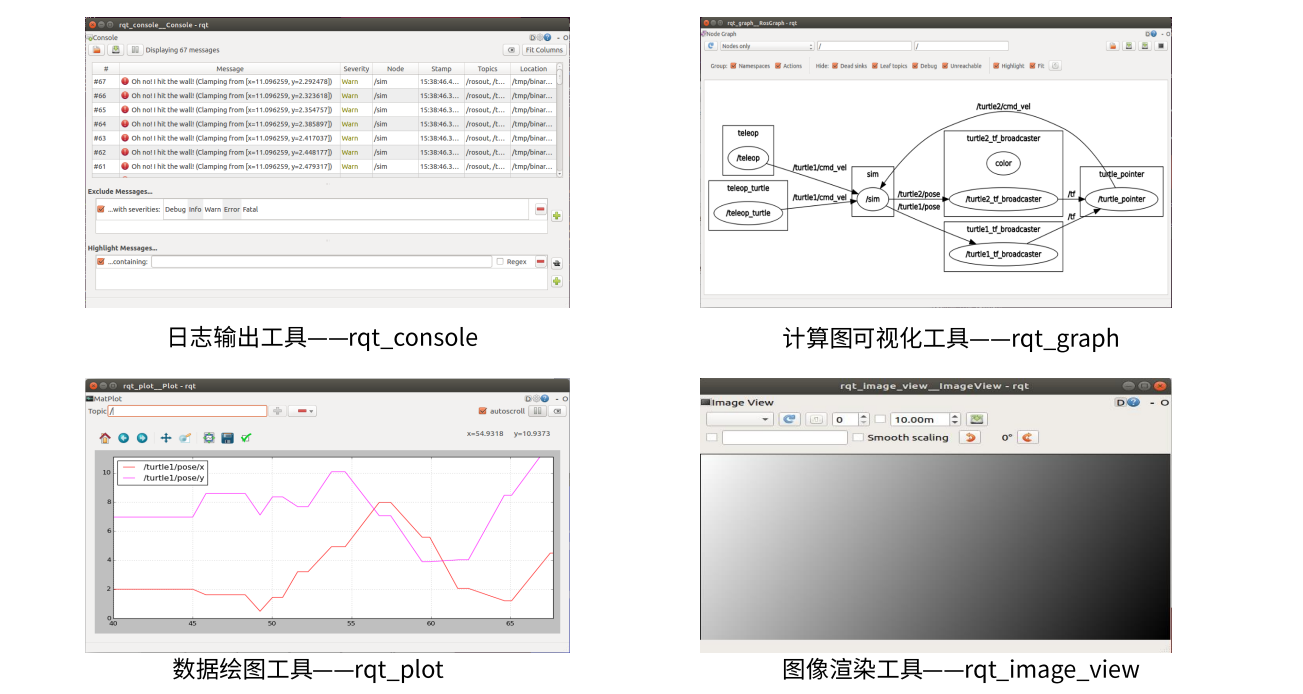
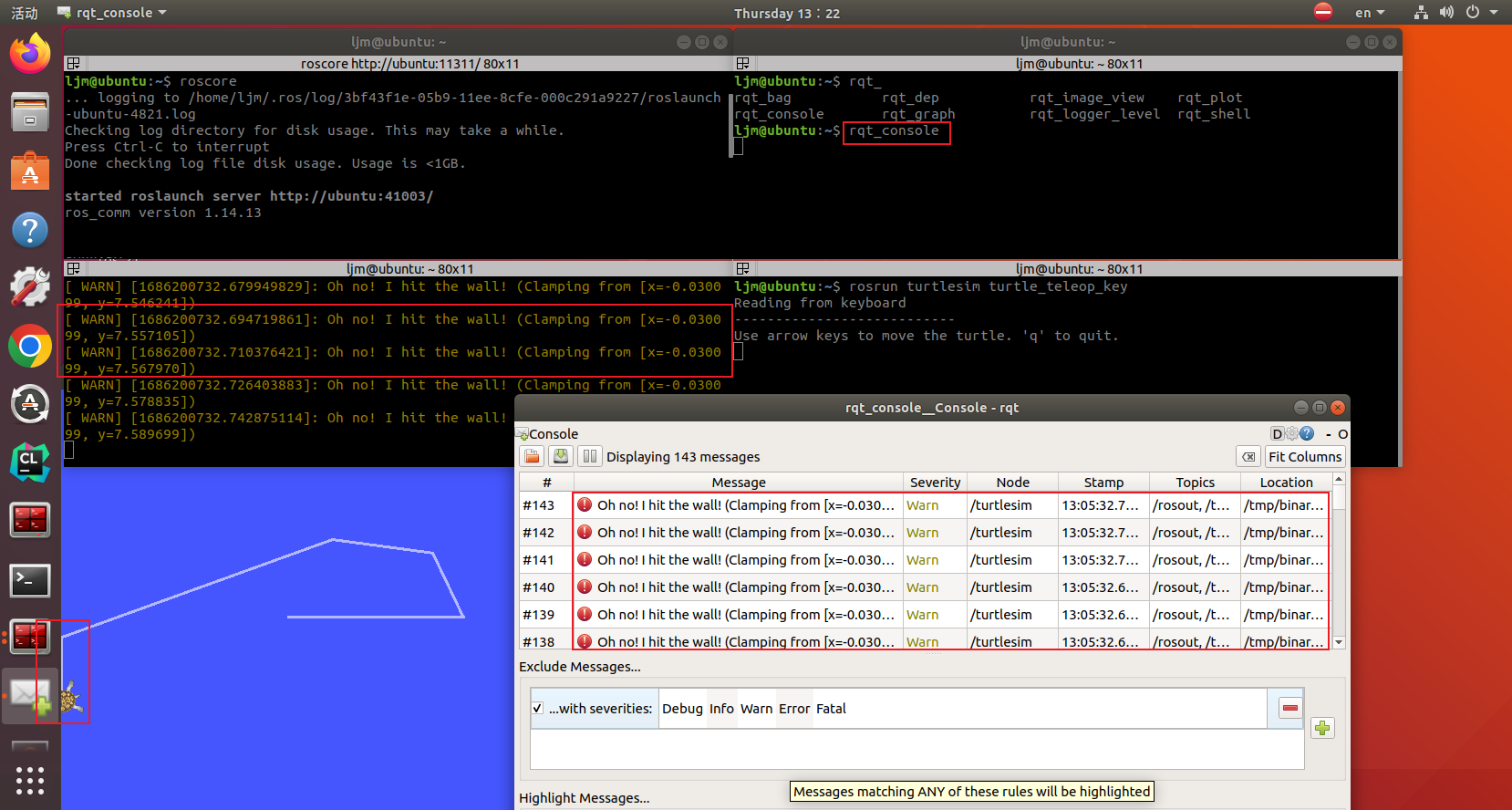
日志输出工具:rqt_console
还是以小海龟为例,我们先来启动海龟例程
roscore rosrun turtlesim turtlesim_node
然后新建终端打开日志输出工具
rqt_console
然后打开海龟键盘控制节点,让海龟动起来,并撞上墙,rqt_console就会把日志信息都显示出来。
rosrun turtlesim turtle_teleop_key
绘制数据曲线:rqt_plot
前面已经打开了海龟控制的相关节点,这里我们打开数据绘图工具rqt_plot。
rqt_plot
在在左上角的输入框中输入左斜杠/可以看到自动填充项,我们选择 /turtle1/pose 按回车,就会显示位置信息的实时情况。
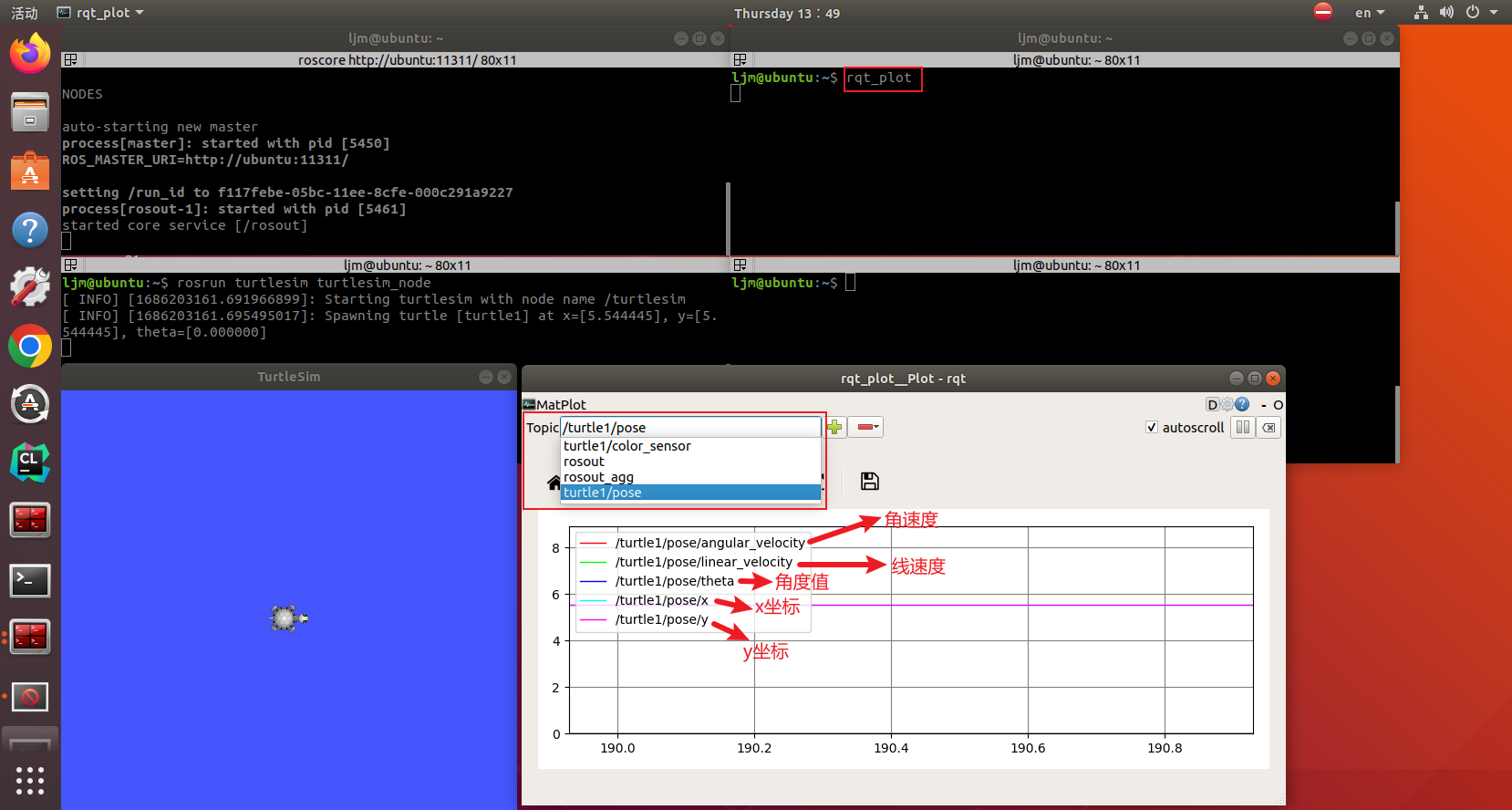
然后我们让海龟动起来,可以看到各个数据信息的变化,
rosrun turtlesim turtle_teleop_key

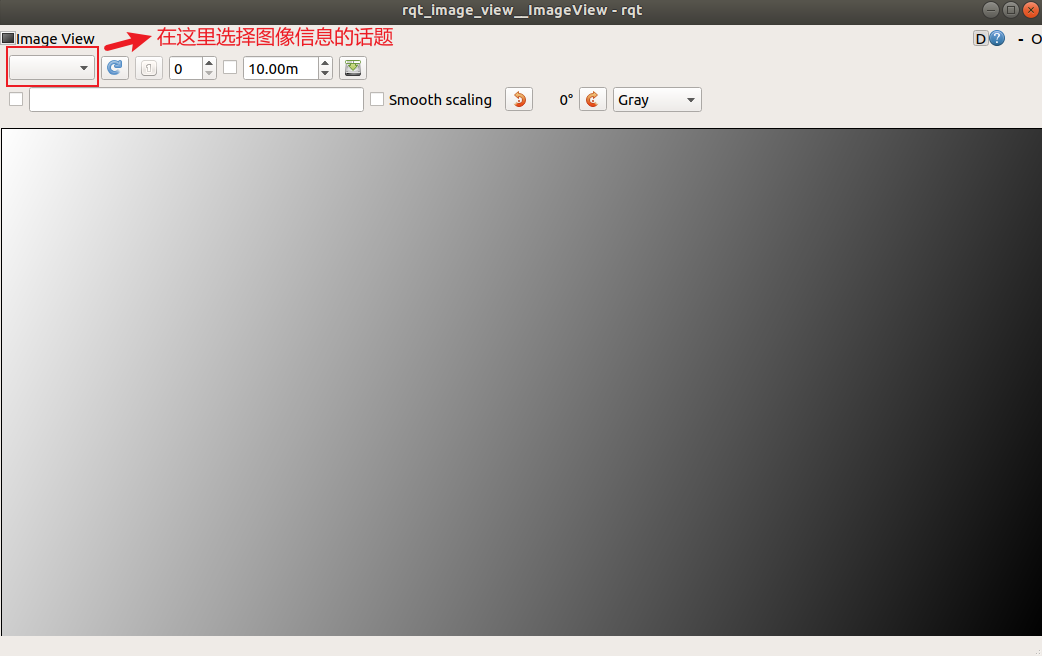
图像渲染工具:rqt_image_view
rqt_image_view
默认里面是没有任何的图像的,需要插入摄像头,驱动摄像头跑起来,然后摄像头会不断的发布图像信息,在左上角选择图像信息的话题,rqt_image_view会把图像渲染出来,包括rgb的彩色值,如果使用rgbd的话,也可以显示深度图,红外图,只要符合ROS图像的定义都可以显示
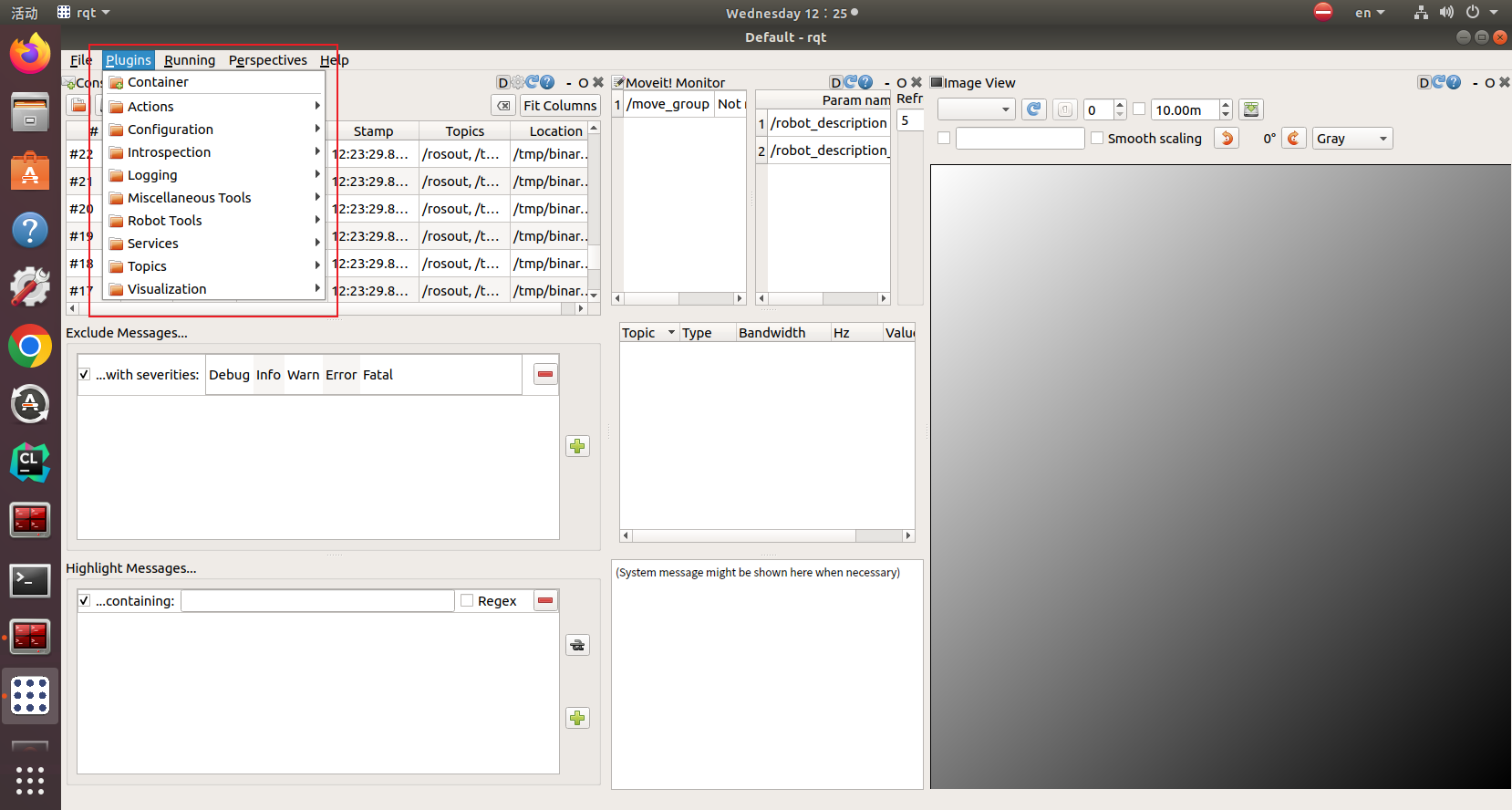
综合工具:rqt
rqt
直接输入rqt可以打开图形界面总接口 在Plugin菜单有各种图形界面的工具,选择点击可分块显示在下方, 前面我们介绍过的Qt工具包都可以在Plugin菜单里找到。
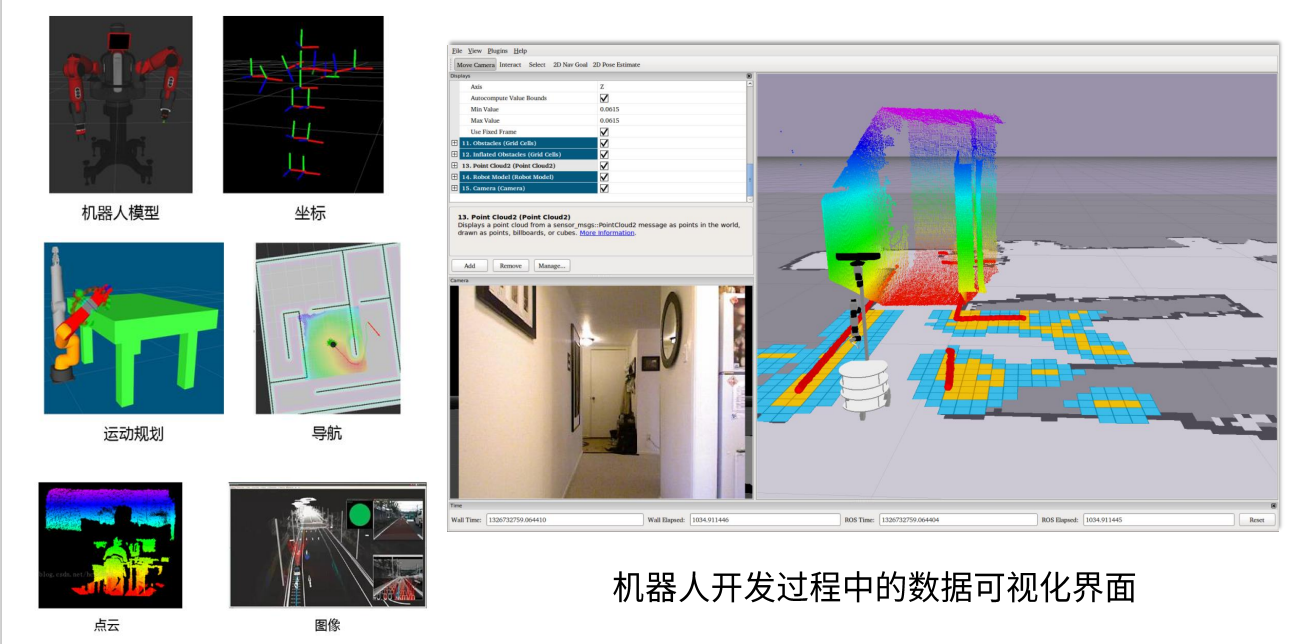
2. 三维可视化工具:Rviz
在前面的学习中我们就曾使用过Rviz来显示空间坐标系的相对位置。
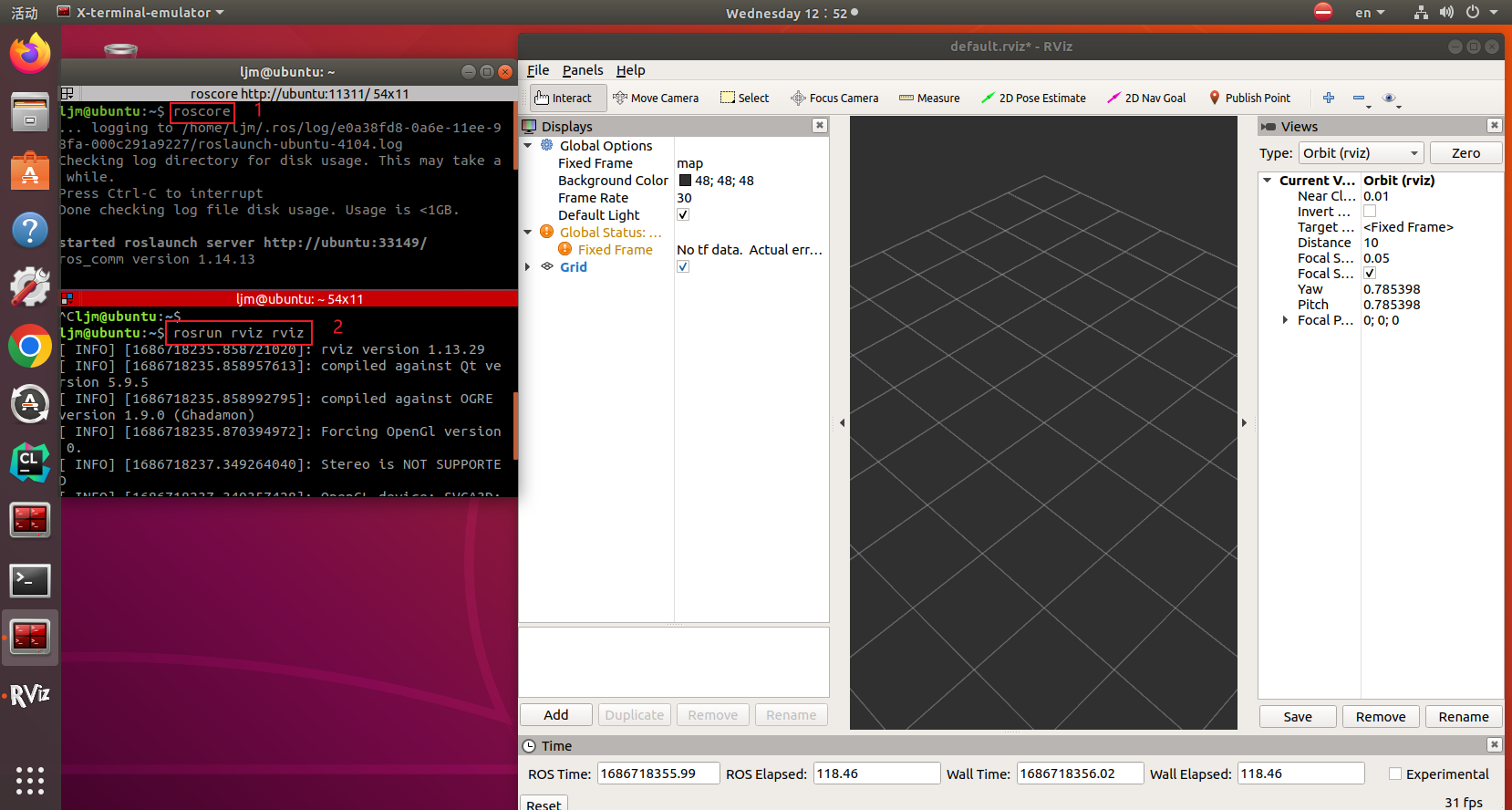
Rviz启动
roscore rosrun rviz rviz
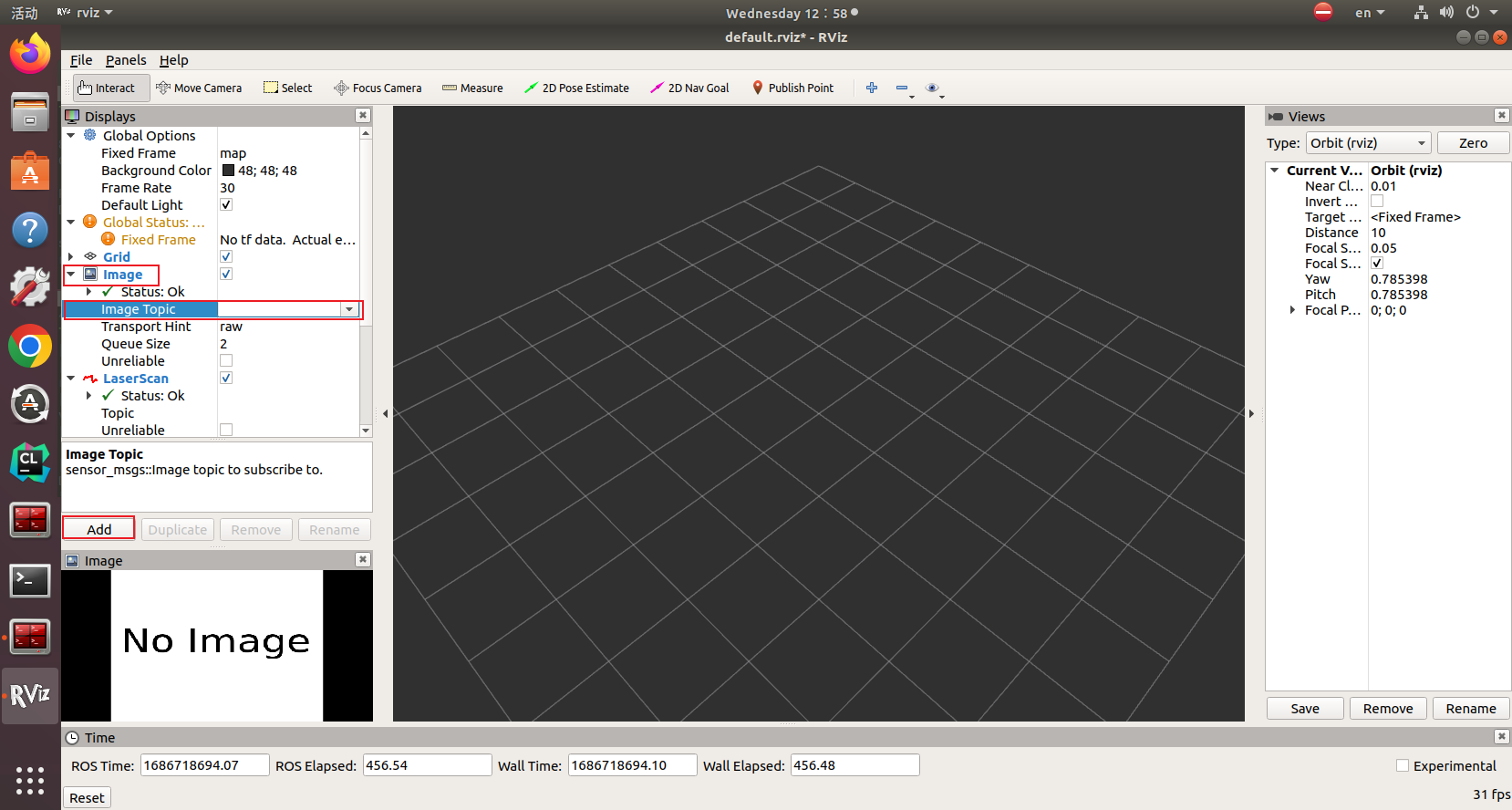
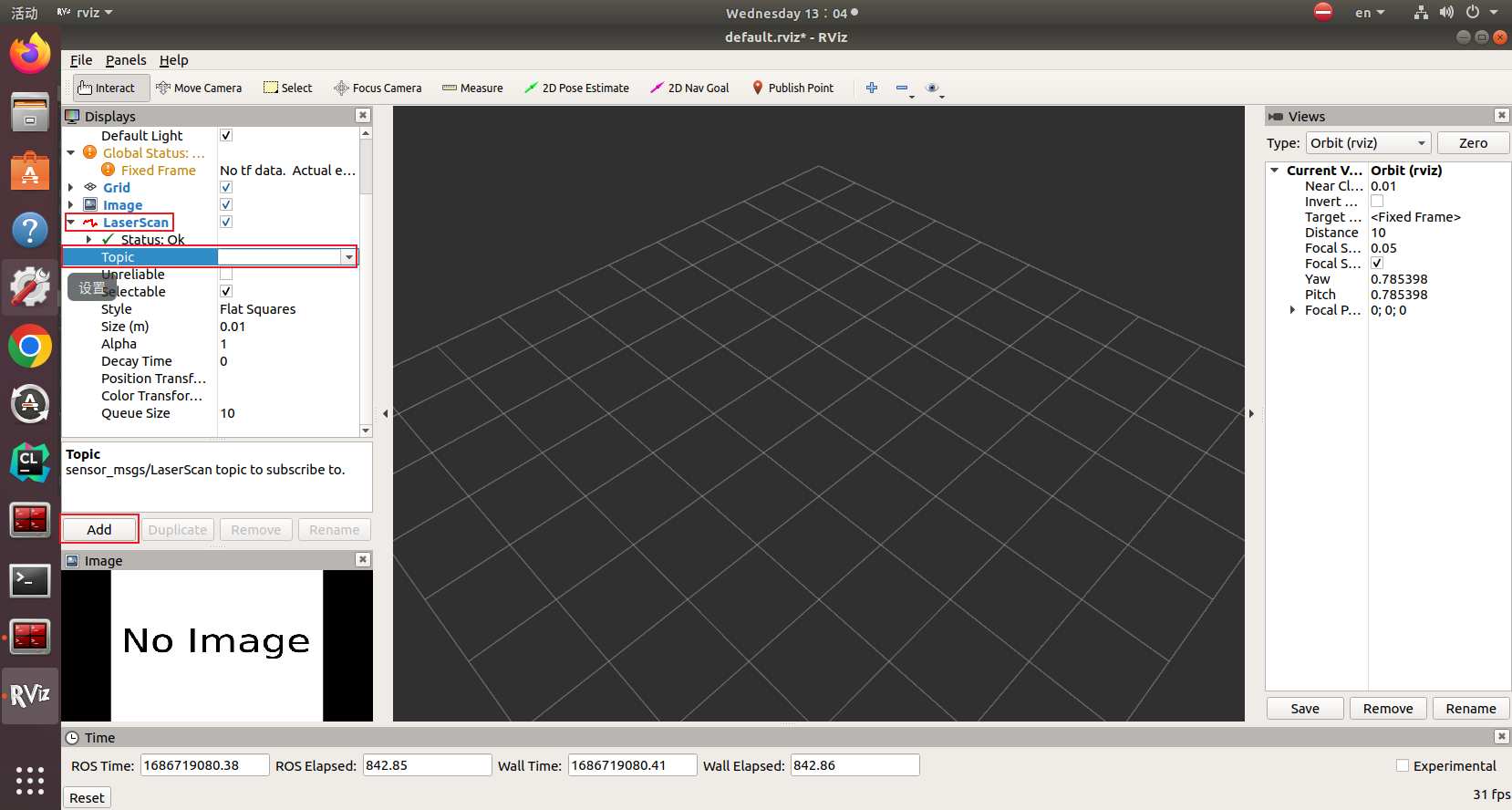
使用示例
点击Add,选择添加Image项,如果我们有摄像头的话,就会在 Image Topic 中显示出来相应的驱动,
我们选择它就可以获取摄像头的图像信息。
点击Add,选择添加LaserScan项,如果我们有激光雷达的话,选择相应的的驱动即可获取渲染出来的效果。
3. 仿真平台:Gazebo
Gazebo启动
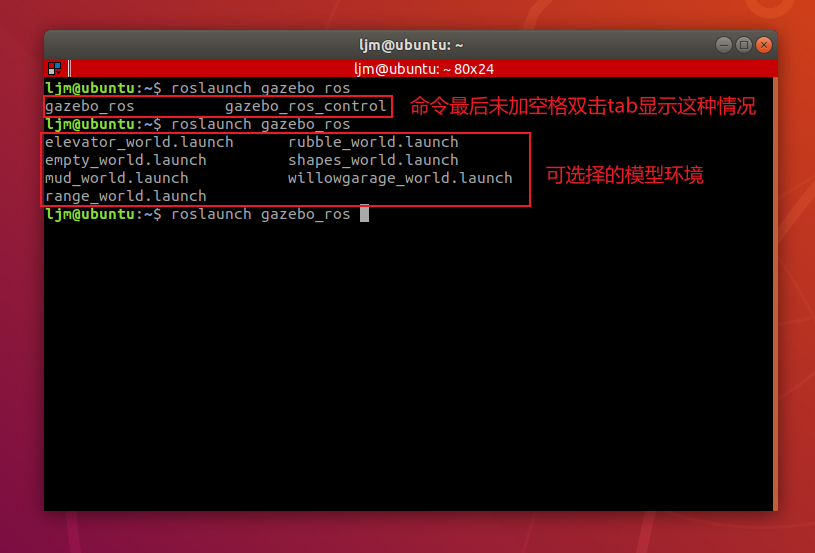
模型环境查看
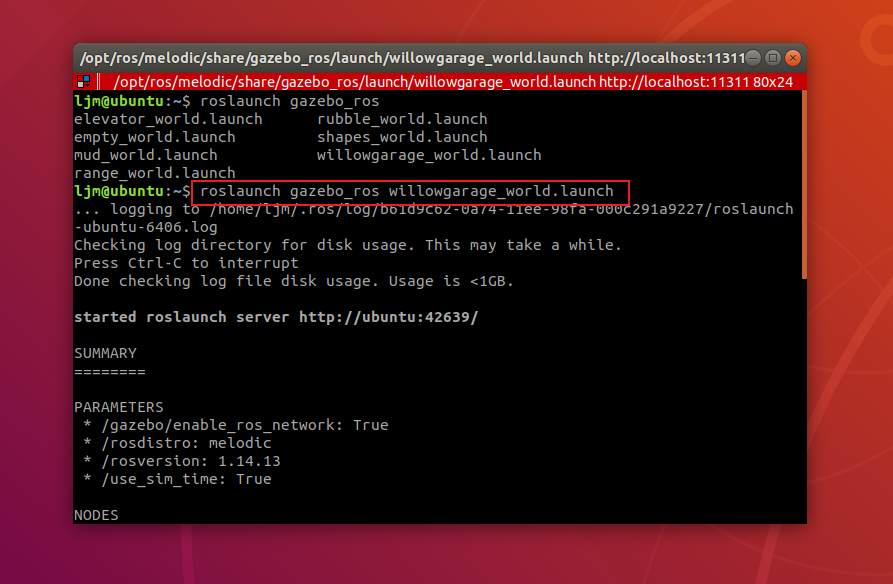
roslaunch gazebo_ros
注意:此命令最后要空格,然后再双击tab,才能显示可选择的模型环境。如果命令最后没加空格双击tab,显示信息只有两个。
选择模型环境打开
roslaunch gazebo_ros willowgarage_world.launch
模型环境打开说明:
如果用虚拟机的话,可能运行效果很差或者不成功(比如我的就是),因为,首先gazebo运行需要调用很多资源,而且需要许多图形渲染工具,而虚拟机一方面性能可能就不太能支撑的起来,另一方面gazebo运行会从远程服务器加载一些离线的模型,比如:阳光,大地,这也是模型,尤其是第一次启动,它需要连接很久,因为这个服务器在国外,如果网络不好的话,可能需要加载很长时间,设置一直就加载不出来,大家知道有这样一个工具就行了。