第一部分:定时器基本定时的功能;
第二部分:定时器的输出比较功能;
第三部分:定时器输入捕获的功能;
第四部分:定时器的编码接口。
1 TIM简介
- TIM(Timer)定时器;
- 定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断(定时触发中断);
- 16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时(72M/65536/65536,再取倒数);
- 不仅具备基本的定时中断功能,而且还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能;
- 根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型。
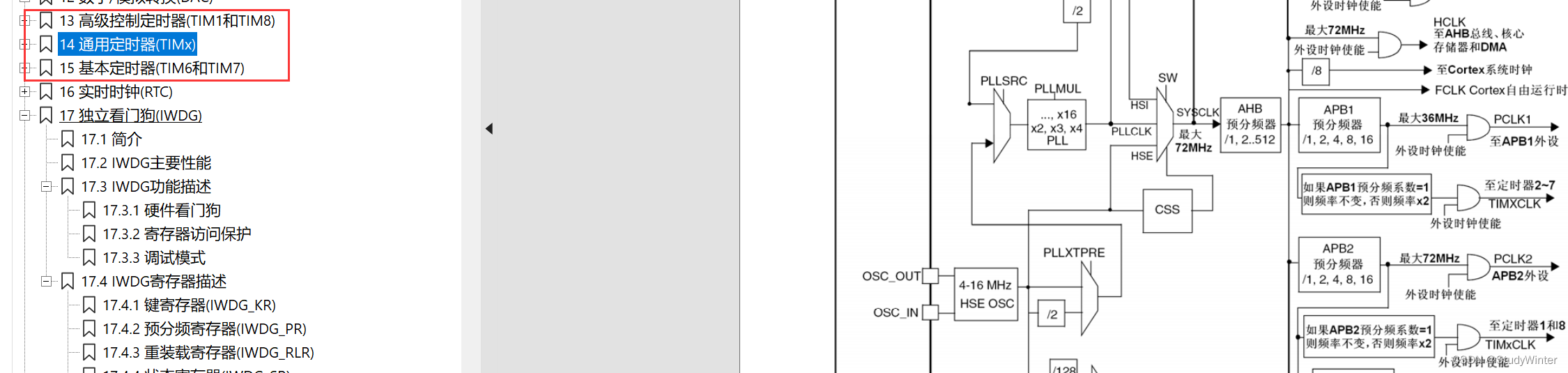
1.1 定时器类型
| 类型 | 编号 | 总线 | 功能 |
| 高级定时器 | TIM1、TIM8 | APB2 | 拥有通用定时器全部功能,并额外具有重复计数器、死区生成、互补输出、刹车输入等功能 |
| 通用定时器 | TIM2、TIM3、TIM4、TIM5 | APB1 | 拥有基本定时器全部功能,并额外具有内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等功能 |
| 基本定时器 | TIM6、TIM7 | APB1 | 拥有定时中断、主模式触发DAC的功能 |
STM32F103C8T6定时器资源:TIM1、TIM2、TIM3、TIM4
1.1.1 基本定时器
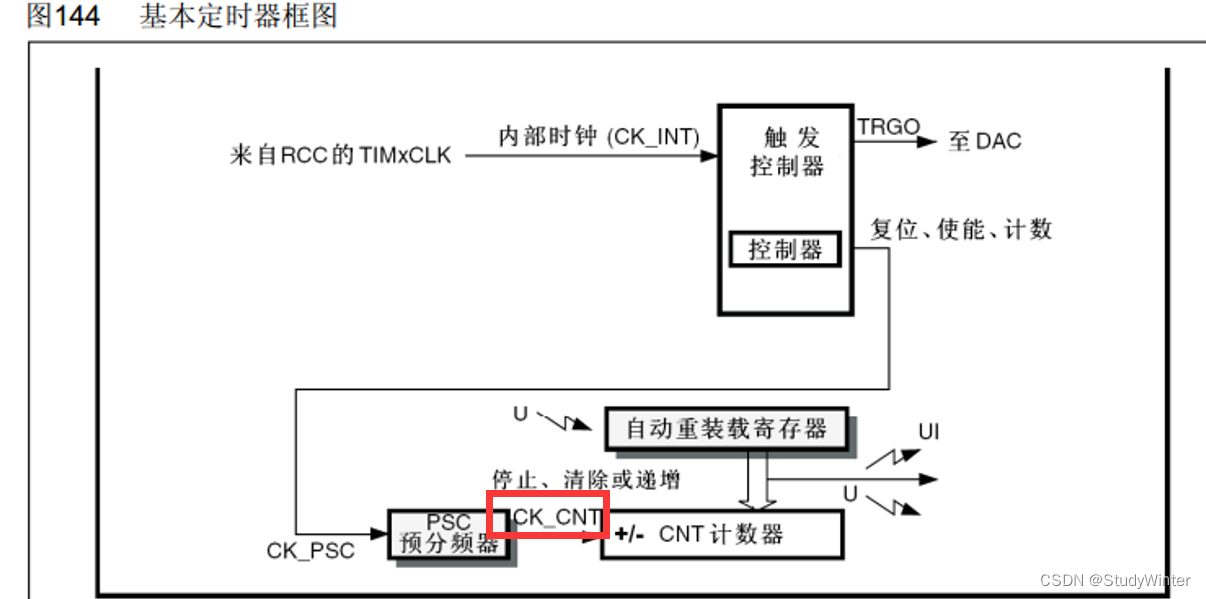
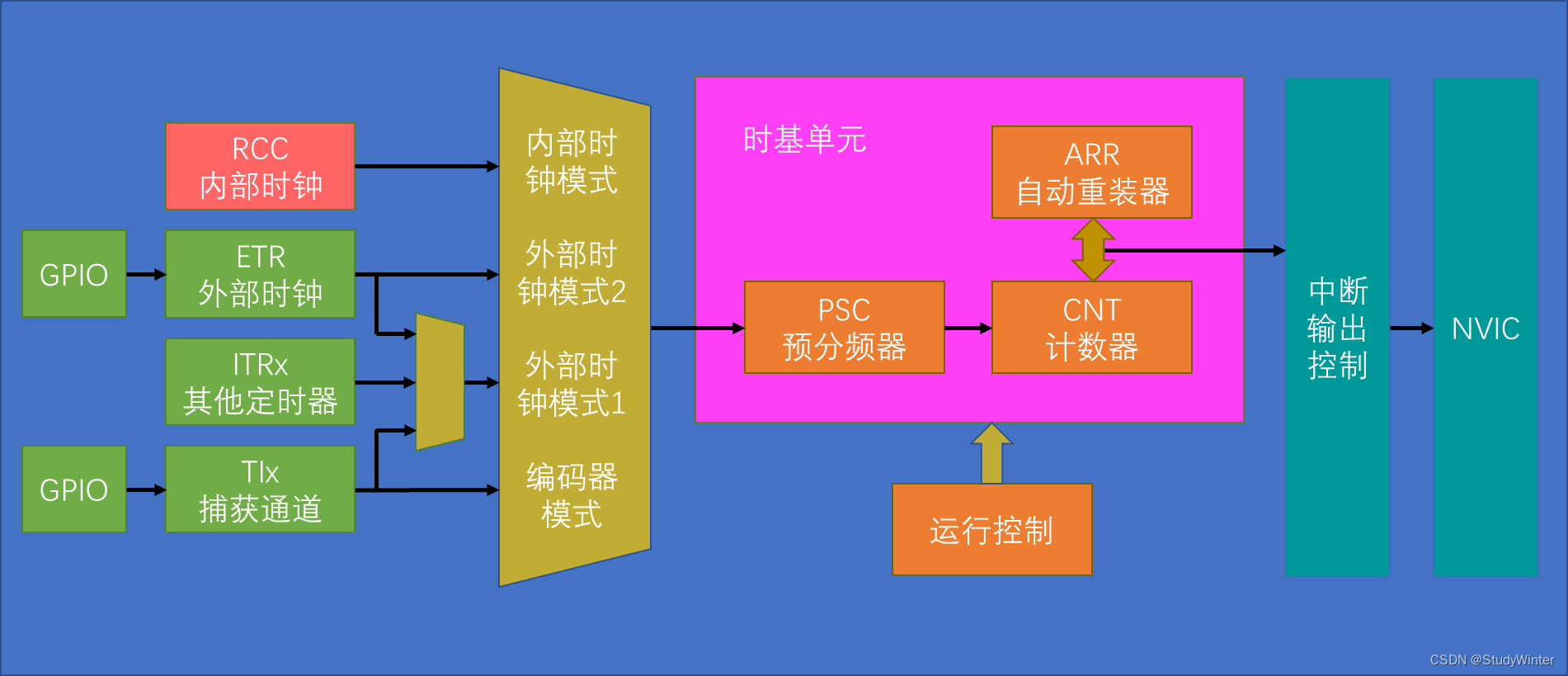
基本定时器框图:拥有定时中断、主模式触发DAC的功能

下面三部分预分频器、计数器、自动重装载寄存器构成最基本的计数计时电路,因此叫时基单元。
预分频器之前连接的是基准计数时钟的输入,可以认为连接到了输入端,也就是CK_INT(72MHz)
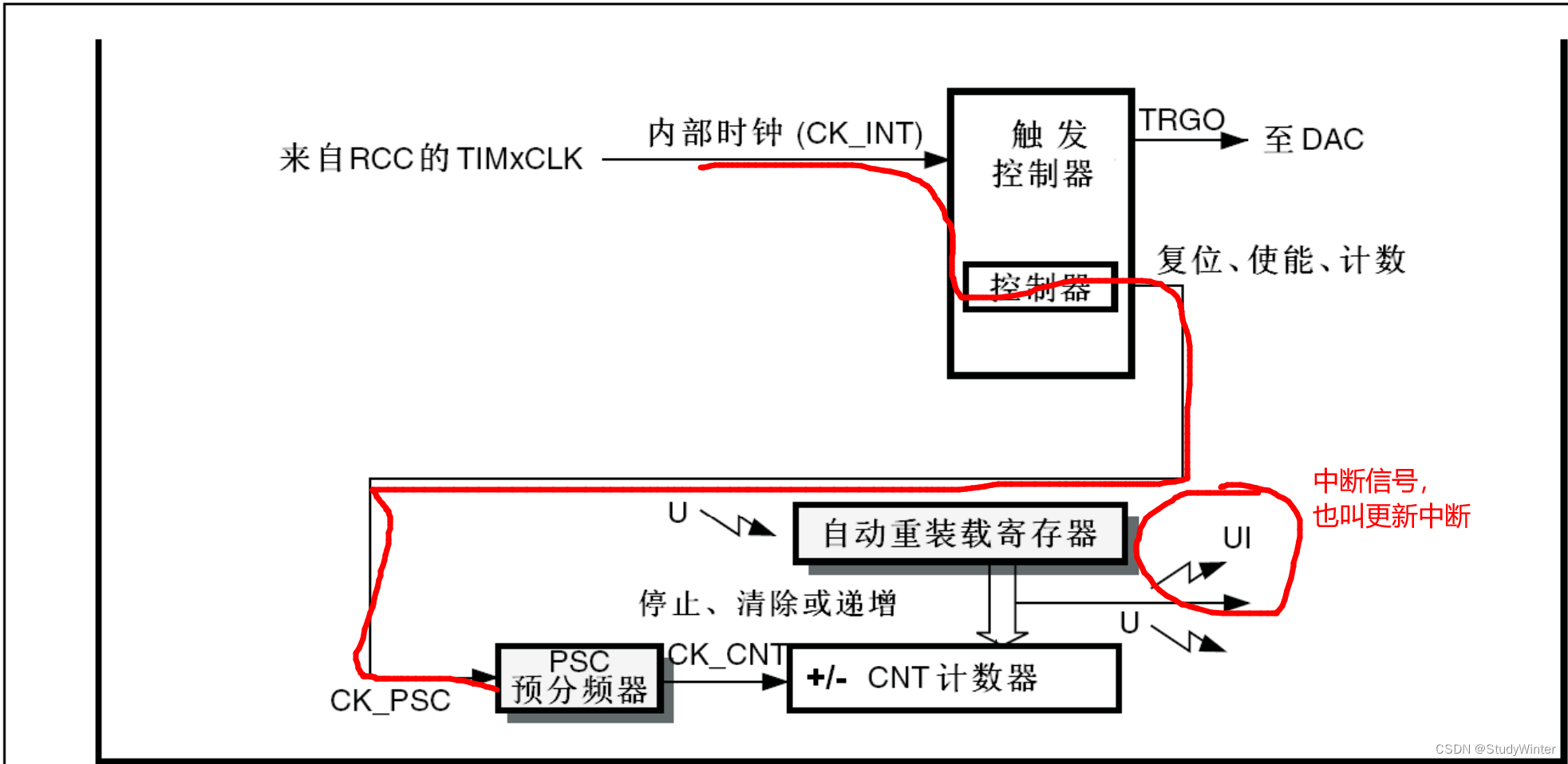
预分频器对72MHz的计数时钟进行分频,预分频器写0就是不分频,写1就是二分频36MHz......,所以预分频器的值和实际的分频系数相差1,即实际分频系数=预分频器的值 + 1。这个预分频器是16位的,所以最大值是65535,也就是65536分频。
然后是计数器,计数器可以对预分频器后的计数时钟进行计数,计数时钟每来一个上升沿,计数器就加1,这个计数器也是16位的,所以里面的值可以从0一直加到65535,再加的话,计数器就会从0开始。所以计数器的值在计时过程中会不断的自增运行,当自增运行到目标值时,产生中断,那就完成了定时的任务,所以还需要一个存储目标值的寄存器,那就是自动重装载寄存器。
自动重装载寄存器也是16位的,它存储的就是我们写入的计数目标,在运行过程中,计数器值不断自增,自动重装载寄存器的值是固定的,当计数值等于自动重装值时,也就是计时时间到了,此时会产生一个中断信号,并且清零计数器,计数器自动开始下一次的计数计时。
UI那里向上的折线,代表这里会产生中断信号,像这种计数值等于重装值产生的中断,称为"更新中断",这个更新中断会通往NVIC,再配置好NVIC的定时器通道,那定时器的更新中断就能够得到CPU的响应了。
U向下的折线,代表这里会产生一个事件,这里对应的事件称为"更新事件",更新事件不会触发中断,但是可以触发内部其它电路的工作。
总结:从基准时钟,到预分频器,再到计数器,计数器自增,同时不断与自动重装寄存器进行比较,它俩值相等时,即计时时间到,这时会产生一个更新中断和更新事件,CPU响应更新中断,就完成定时中断的任务了。
主模式触发DAC(数字/模拟转换模块)功能:它能让内部的硬件在不受程序的控制下实现自动运行。
用途:在使用DAC的时候,可能会用DAC输出一段波形,那就需要每隔一段时间来触发一次DAC,让它输出下一个电压点。如果用正常的思路实现,就是先设置一个定时器产生中断,每隔一段时间在中断函数中调用代码手动触发一次DAC转换,然后DAC输出,这样也是没问题的,但是会使主程序处于频繁被中断的状态,会影响主程序的运行和其它中断的响应,所以定时器设置了一个主模式,使用这个主模式可以把定时器的更新事件映射到触发输出(Trigger Out, TRFO)的位置,然后TRGO直接接到DAC的触发转换引脚上,这样定时器的更新就不需要通过中断来触发DAC转换了,仅需要把更新事件通过主模式映射到TRGO,然后TRGO就会直接去触发DAC了,整个过程不需要软件的参与,实现了硬件的自动化,这就是主模式的作用。

1.1.2 通用定时器

复杂很多,中间部分还是时基单元
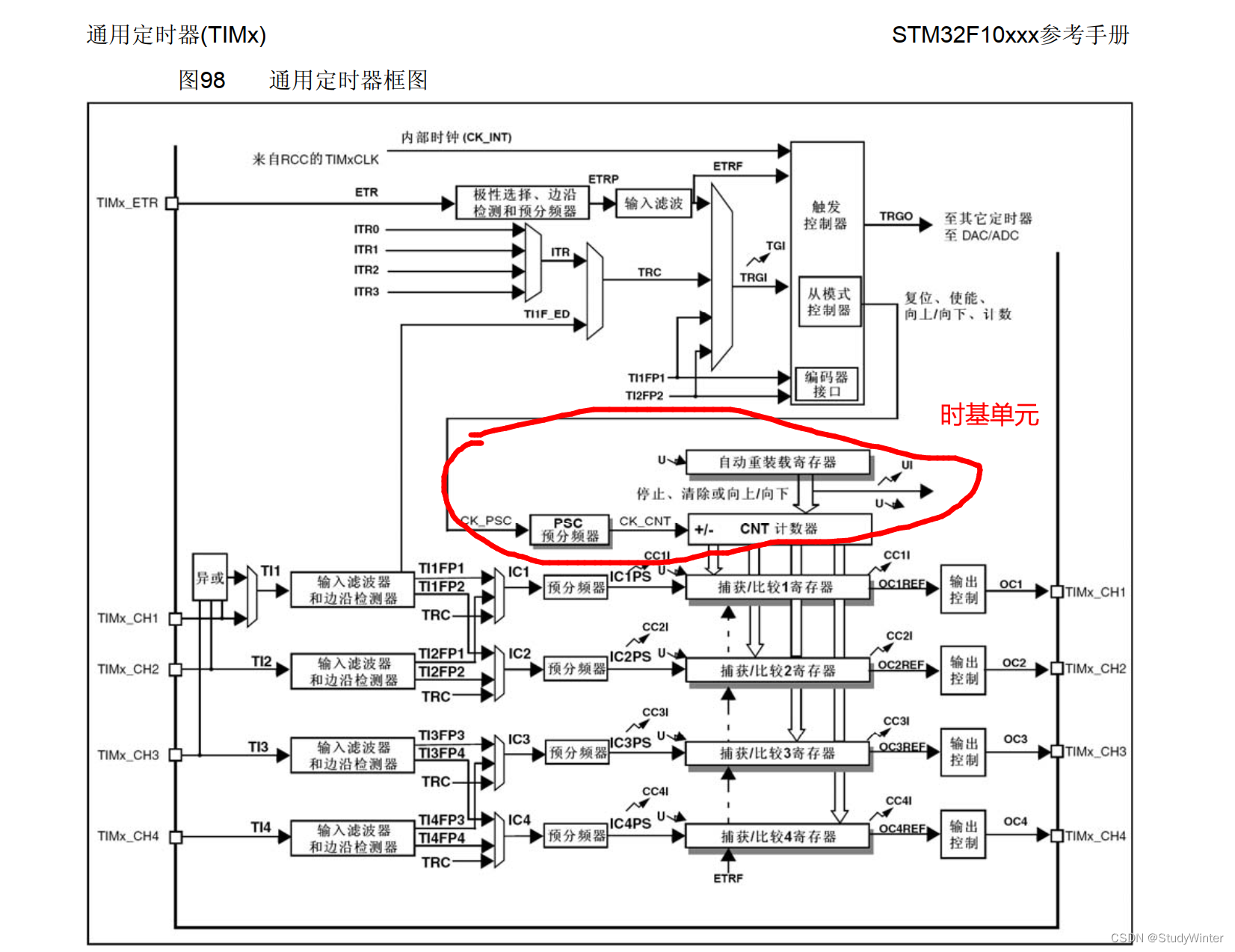
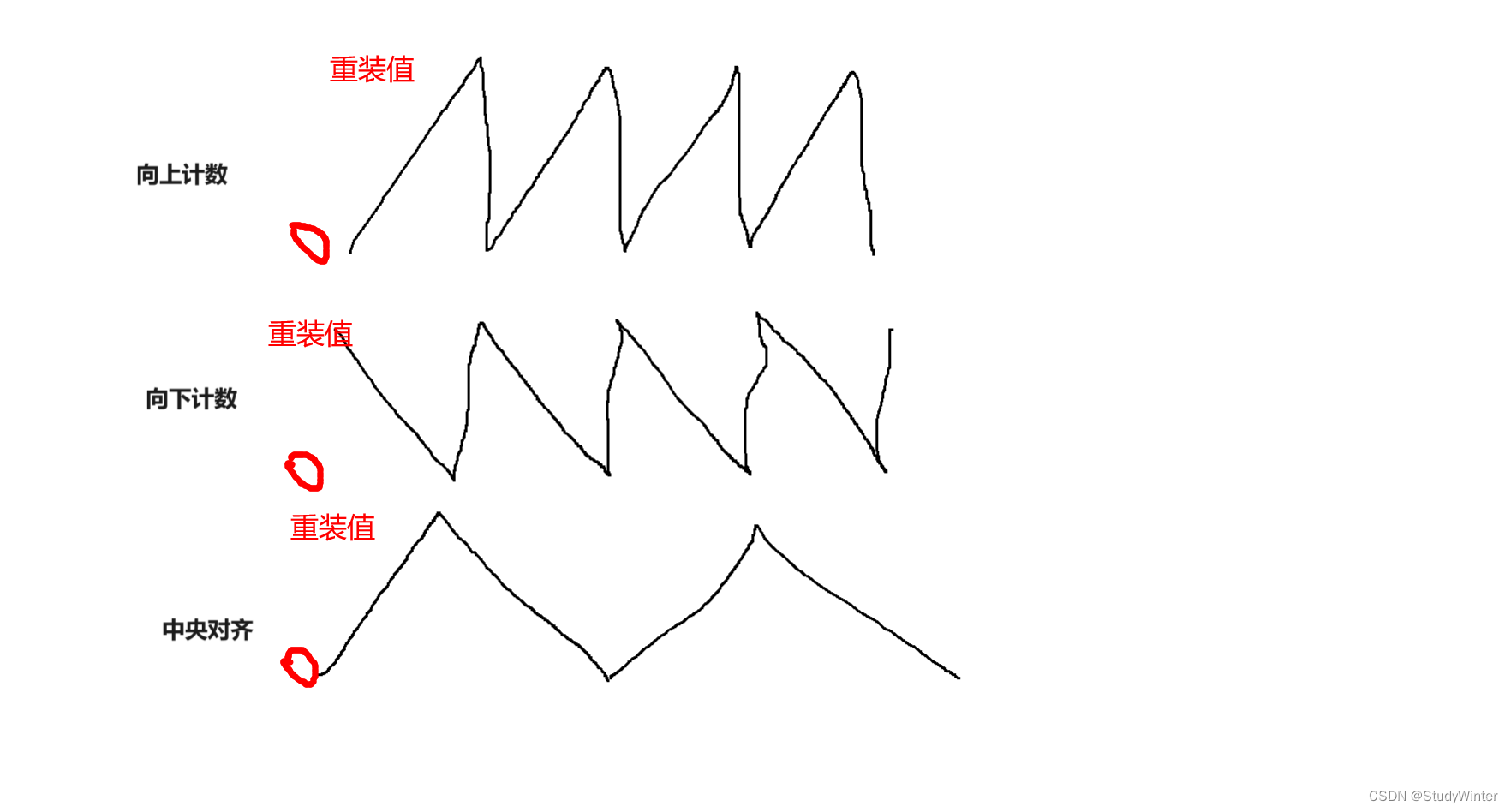
通用计数器那种模式是向上计数,即自增;通用定时器和高级定时器还支持向下计数模式(向下自减,减到0,再回到重装值申请中断)和中央对齐模式(先向上自增到重装值,申请中断,再向下自减,减到0,申请中断)
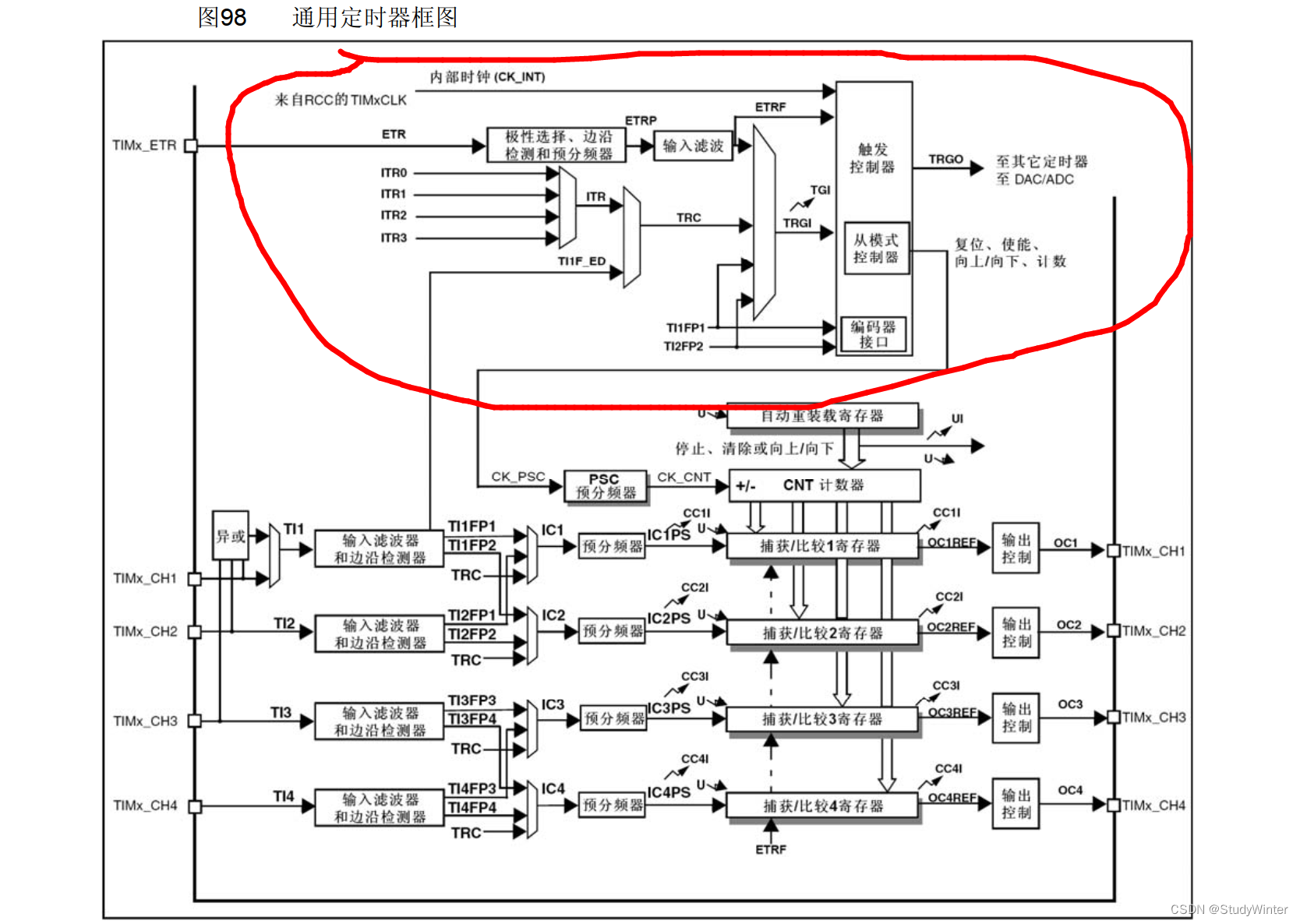
这部分是内外时钟源选择和主从触发模式的结构了。对于基本定时器而言,定时只能选择内部时钟,也就是系统频率72MHz;到了通用定时器这里,时钟源不仅可以选择内部的72MHz时钟,还可以选择外部时钟。第一个外部时钟来自TIMx_ETR引脚上的外部时钟,这个ETR(External)引脚的位置,参考引脚定义表。
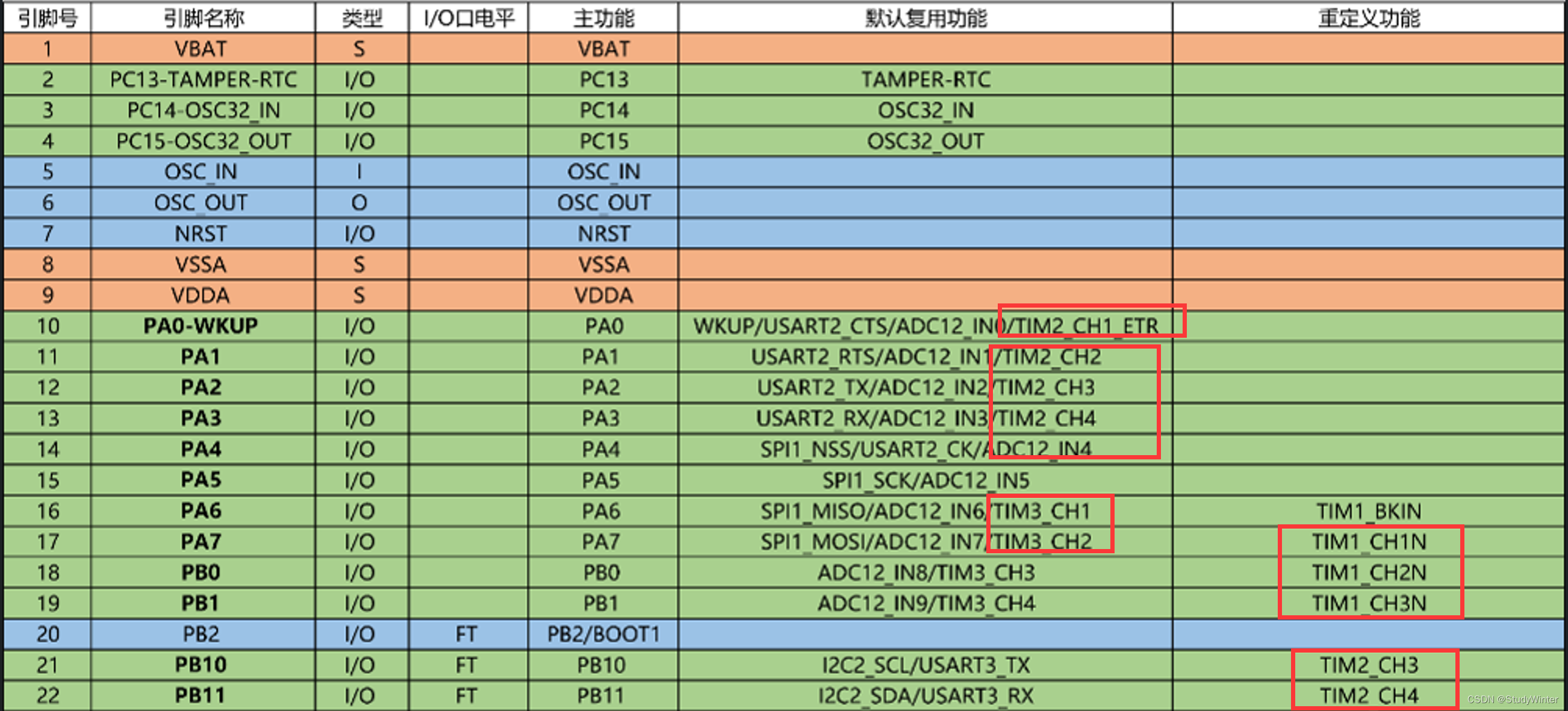
TIM2_CH1_ETR的意思是TIM2的CH1和ETR都是复用在这个位置,即PA0引脚。
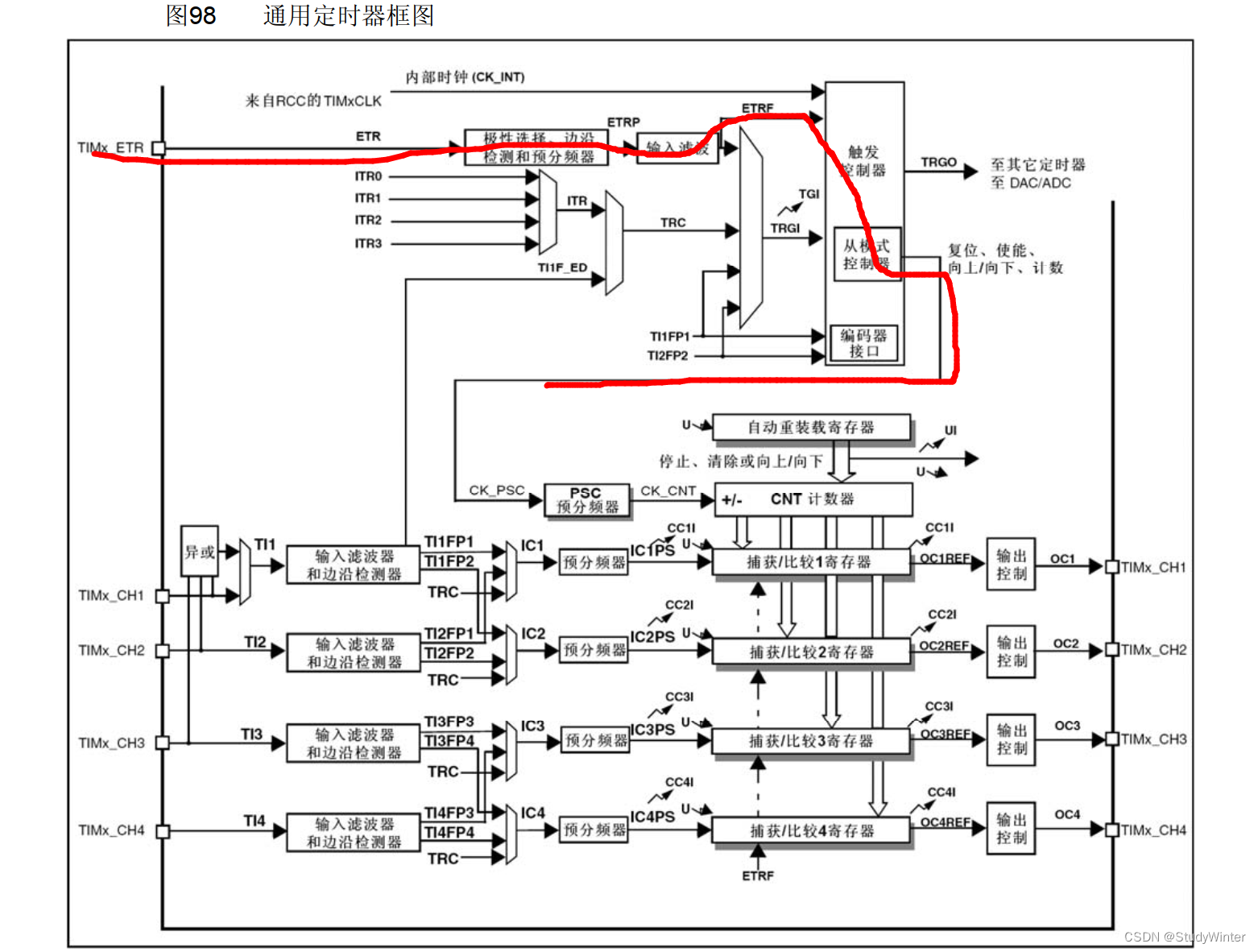
这里就可以在TIM2的ETR引脚,也就是PA0上接一个外部方波时钟,然后配置一下内部的极性选择、边沿检测和预分频器电路,再配置一下输入滤波电路(对输入波形进行滤波),滤波后的信号,兵分两路,上面一路ETRF进入触发控制器,紧跟着就可以选择作为时基单元的时钟了,这一路电路称为"外部时钟模式2"。

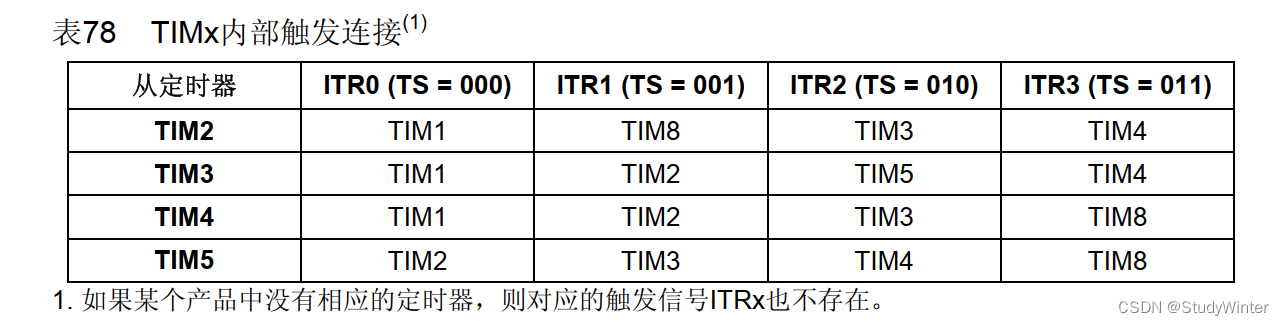
除了外部ETR引脚可以提供时钟外,下面还有一路可以提供时钟,就是TRGI(Trigger In),它主要的作用是用作触发输入来使用的,这个触发输入可以触发定时器的从模式。暂时可以把TRGI看作外部时钟的输入来看,这一路称为"外部时钟模式1"。通过这一路的外部时钟有ETR引脚的信号、ITR信号(ITR信号来自其他定时的TRGO处,连接方式见下图:TIM2的ITR0连到TIM1的TRGO上,TIM2的ITR1连到TIM8的TRGO上,TIM2的ITR2连到TIM1的TRG3上,TIM2的ITR3连到TIM4的TRGO上),可以实现定时器级联的功能。
通过这一路的外部时钟有TI1F_ED,这里连接的是输入捕获单元的CH1引脚,也就是从CH1引脚获得时钟,后面加ED,是边沿的(Edge)意思,也就是通过这一路输入的时钟,上升沿和下降沿均有效。
最后还能通过TI1FP1和TI2FP2获得。其中TI1FP1连接到CH1引脚的时钟,其中TI2FP2连接到CH2引脚的时钟。
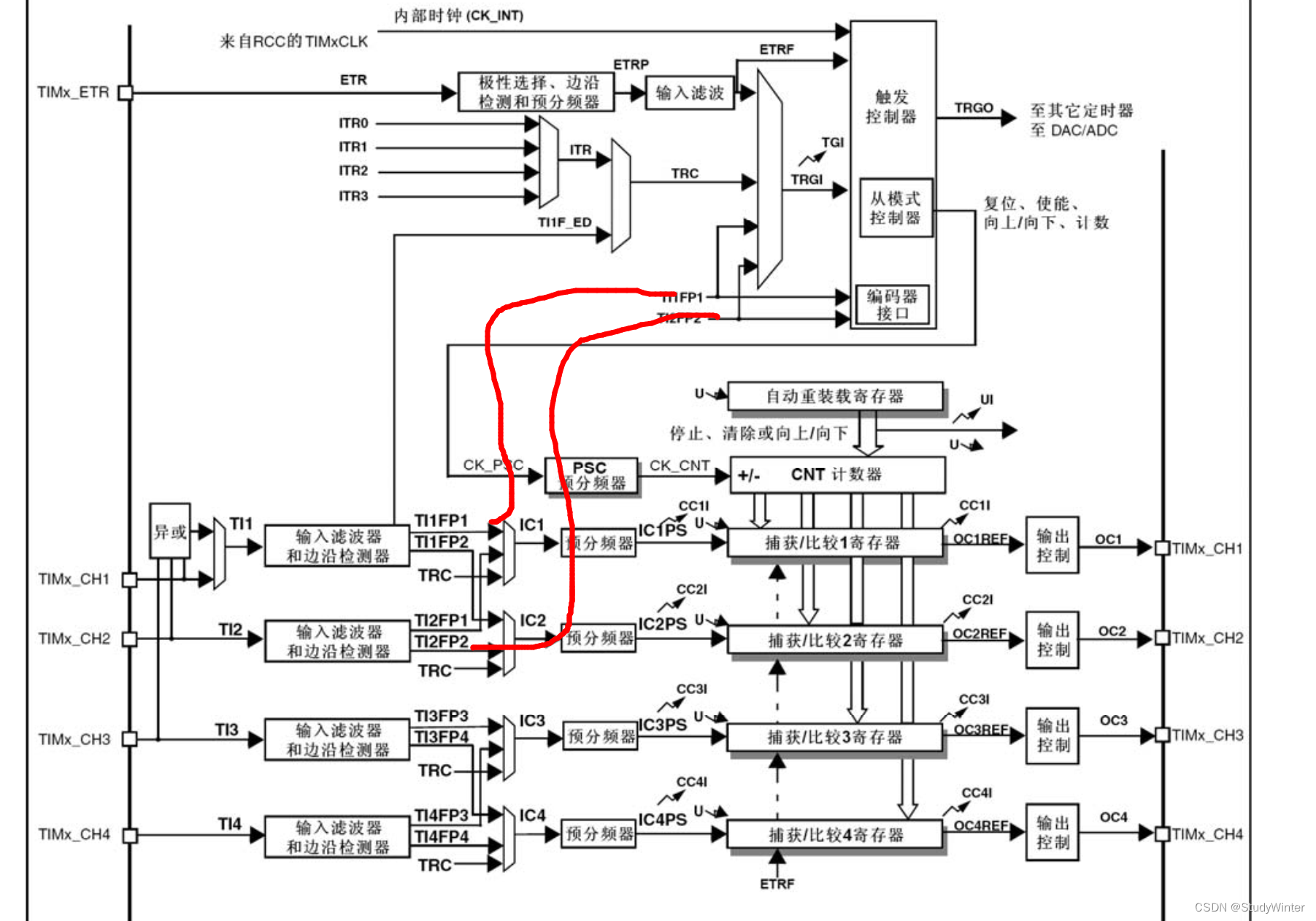
总结:外部时钟模式1的输入可以是ETR引脚、其他定时器、CH1引脚的边沿、CH1引脚和CH2引脚;一般情况外部时钟通过ETR引脚就可以了。
如果使用外部时钟,首选ETR引脚外部时钟模式2的输入。
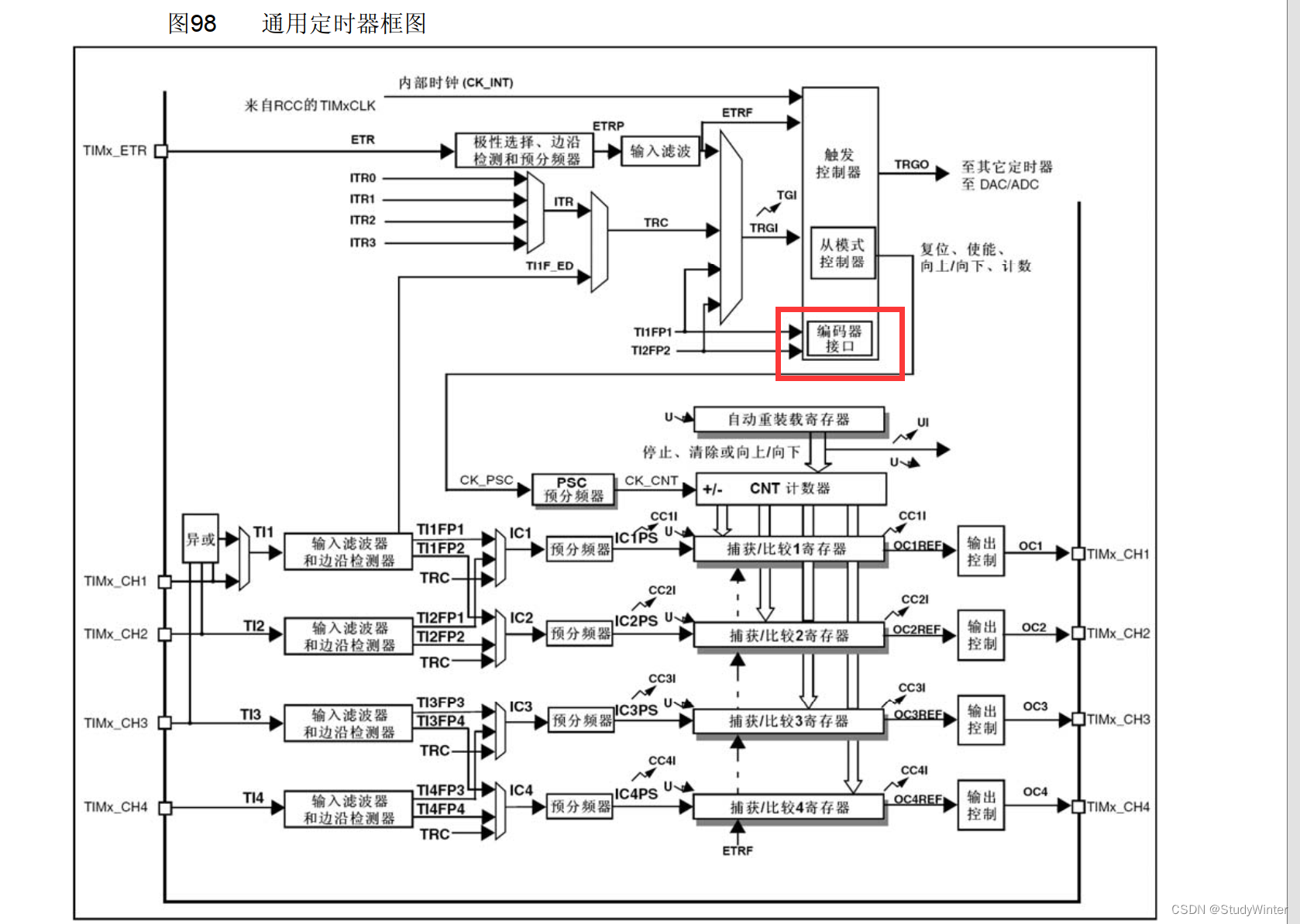
定时的编码器接口,可以读取正交编码器的输出波形。
再看下面的电路,主要是两部分:
输出比较电路:总共有4个通道,分别对应CH1-CH4的引脚,可以用于输出PWM波形,驱动电机
输入捕获电路:总共有4个通道,分别对应CH1-CH4的引脚,可以用来测量输入方波的频率等
中间寄存器是捕获/比较寄存器,是输入捕获和输出比较共用的电路。输入捕获和输出比较不能同时使用。

1.1.3 高级定时器
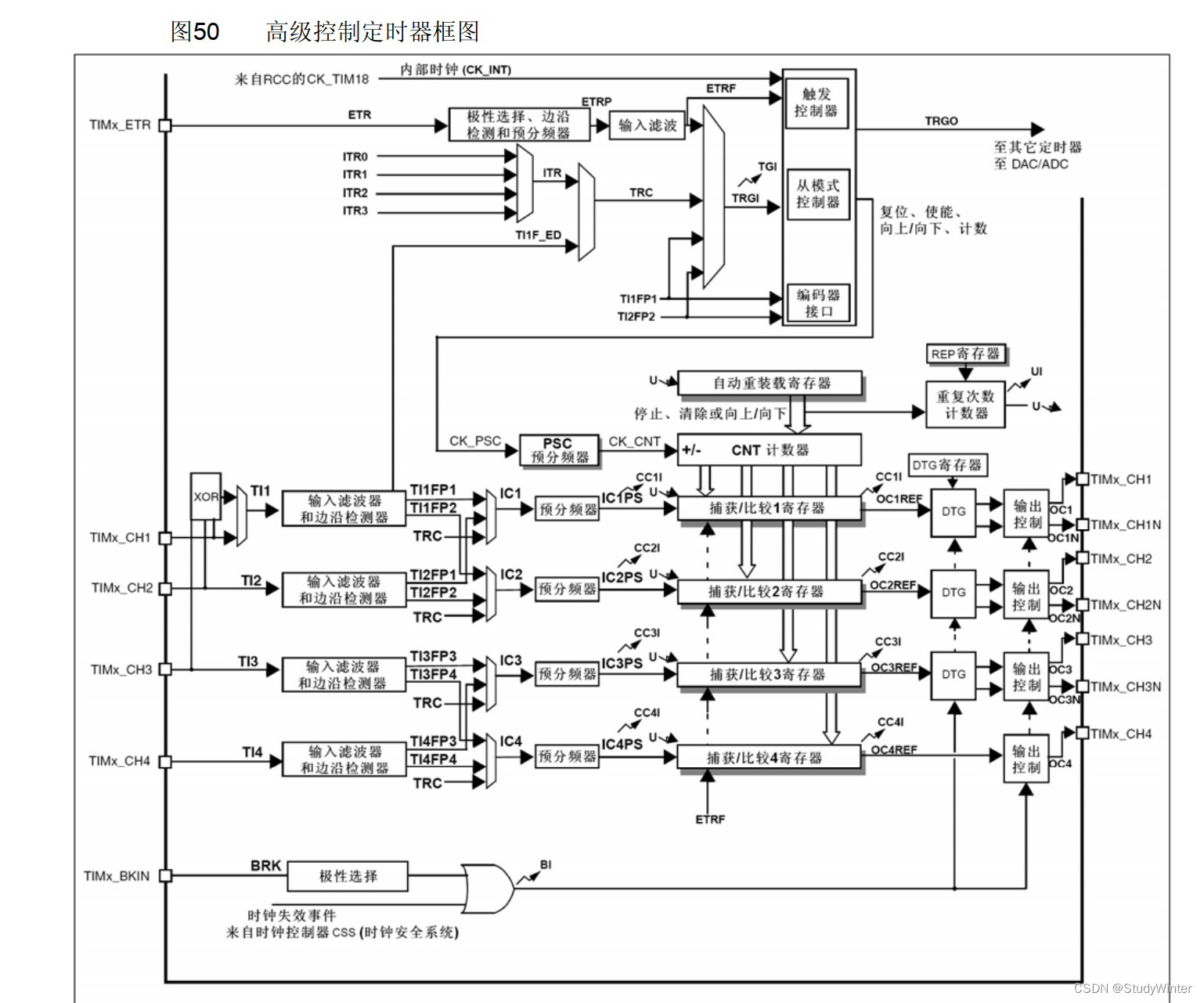
和通用定时器相比多的地方,第一个是申请中断的地方,增加了重复次数计数器,实现每个几个计数周期才发生一次更新事件和更新中断(原来是每个计数周期都会发生更新),相当于对输出的更新信号又做了一次分频(59s*65536)
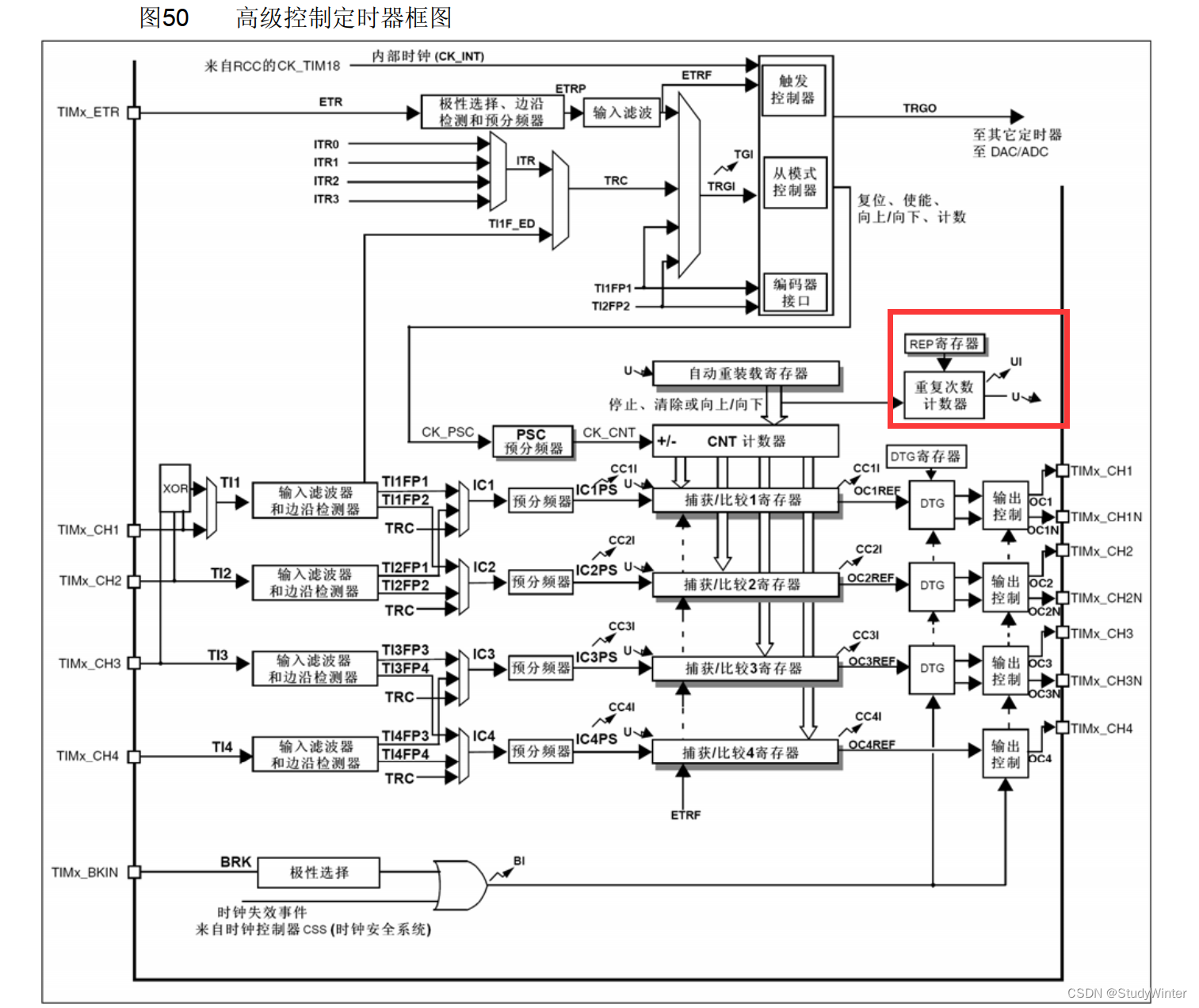
下面的是高级定时器对输出比较模块的升级了
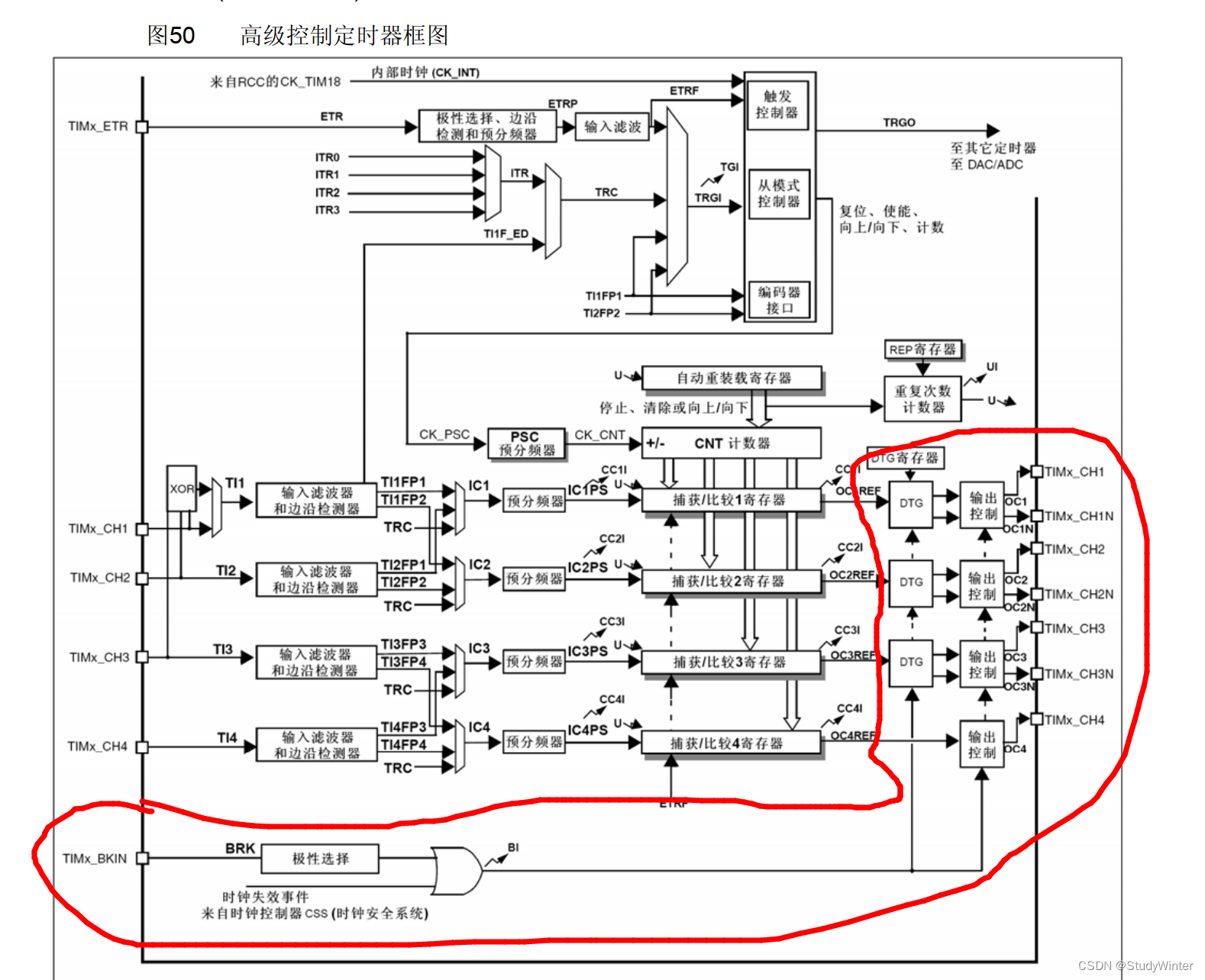
DTG(Dead Time Generate)死区生成电路,右边的输出引脚由原来的一个变为两个互补的输出,可以输出一对互补的PWM波,这些电路是为了驱动三相无刷电机的(四轴飞行器、电动车的后轮、电钻等)
最后一部分就是刹车输入功能,为了给电机驱动提供安全保障的。如果外部引脚TIMx_BKIN(break in)产生刹车信号或者内部时钟失效,产生了故障,那么控制电路就会自动切断电机的输出,防止意外的发生。
1.2 定时中断基本结构
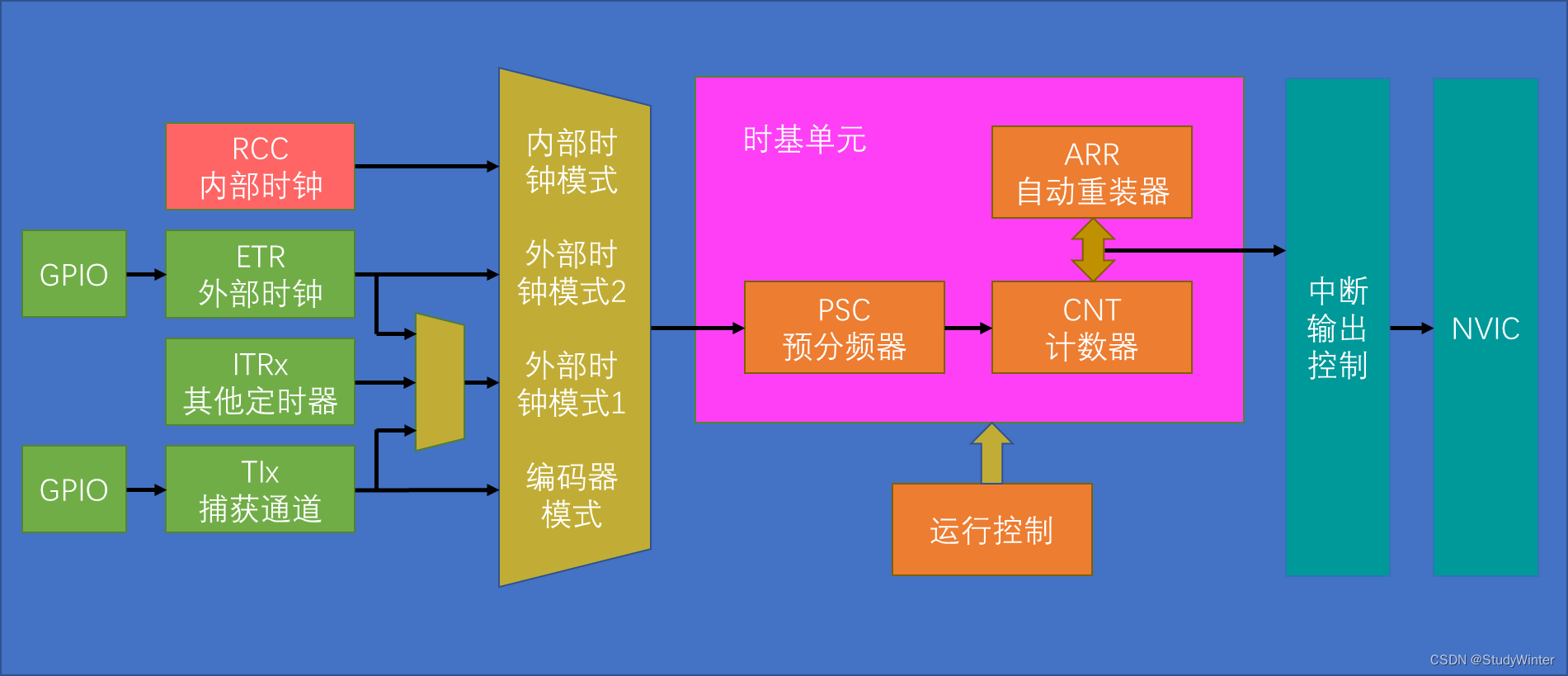
本小结的两任务-定时中断和内部时钟源选择。
左边是为时基单元提供时钟的部分,可以选择RCC内部时钟,也可以选择ETR引脚提供的外部时钟模式2。
第一个案例定时中断使用的是RCC内部时钟;
第二个定时器外部时钟使用的是外部时钟模式2这一路。
中断输出控制就是一个中断输出的允许位。
1.2.1 预分频器时序
预分频器可以将计数器的时钟频率按1到65536之间的任意值分频。它是基于一个(在TIMx_PSC
寄存器中的)16位寄存器控制的16位计数器。这个控制寄存器带有缓冲器,它能够在工作时被改
变。新的预分频器参数在下一次更新事件到来时被采用。
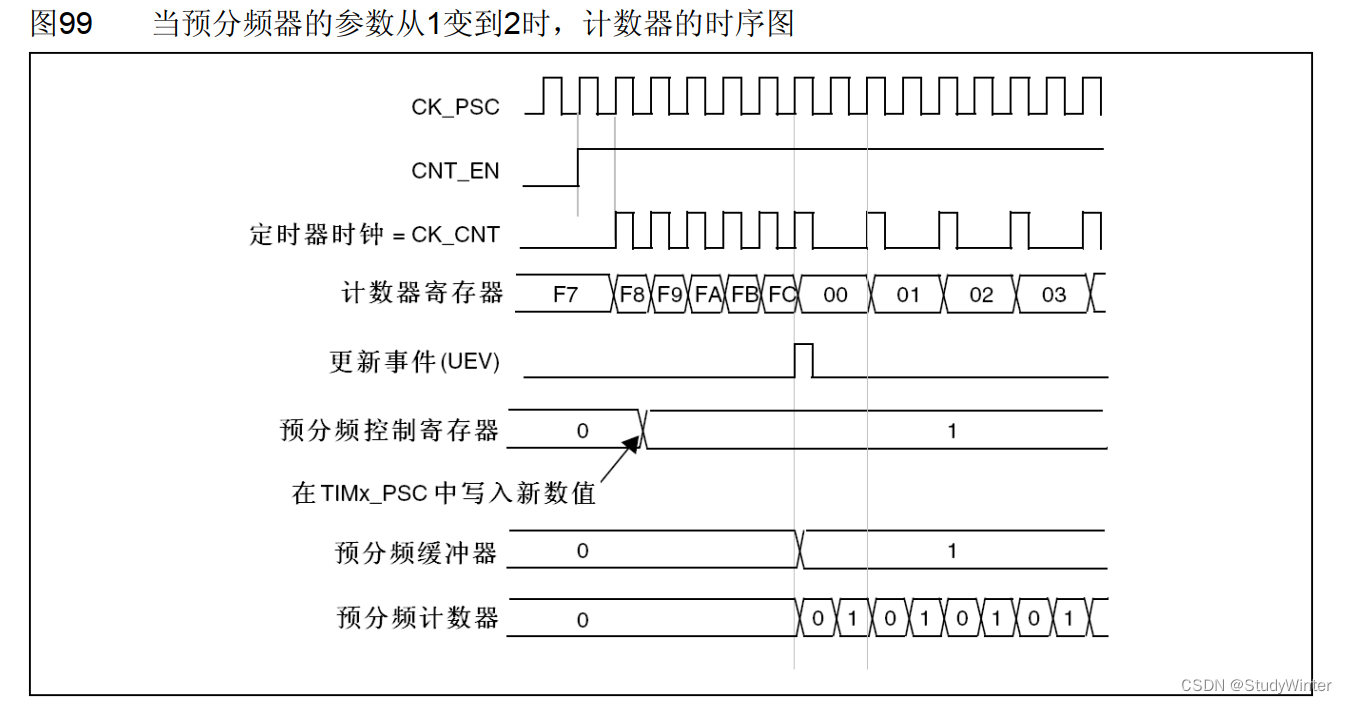
第一行CK_PSC,预分频器的输入时钟,选内部时钟的话,一般是72MHz

第二行CNT_EN,计数器使能,高电平计数器正常运行,低电平计数器停止运行。
第三行CK_CNT,计数器时钟,它既是预分频器的时钟输出,也是计数器的时钟输入;开始时计数器未使能,计数器时钟不运行;然后使能后,前半段,预分频器系数为1,计数器的时钟等于预分频器前的时钟;后半段,预分频器系数变为2,计数器的时钟也就变为预分频器前时钟的一半了。
第四行计数器寄存器,在计数器时钟的驱动下,计数器寄存器也跟着时钟的上升沿不断自增。在中间位置FC之后,计数值变为0,可以推断出ARR(自动重装值)就是FC,当计数值和重装值相等,并且下一个时钟来临时,计数值才清零,同时第五行产生一个更新事件(UEV)。这就是一个计数周期的工作流程。
下面还有三行时序。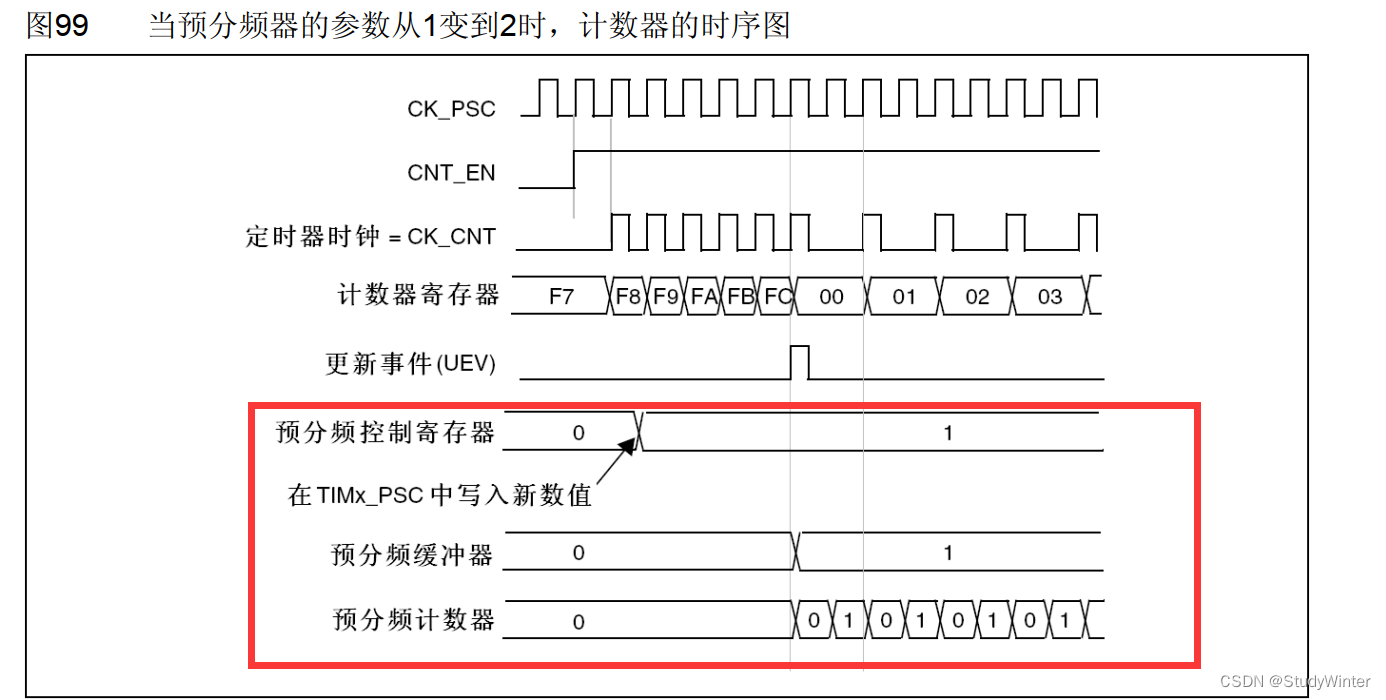
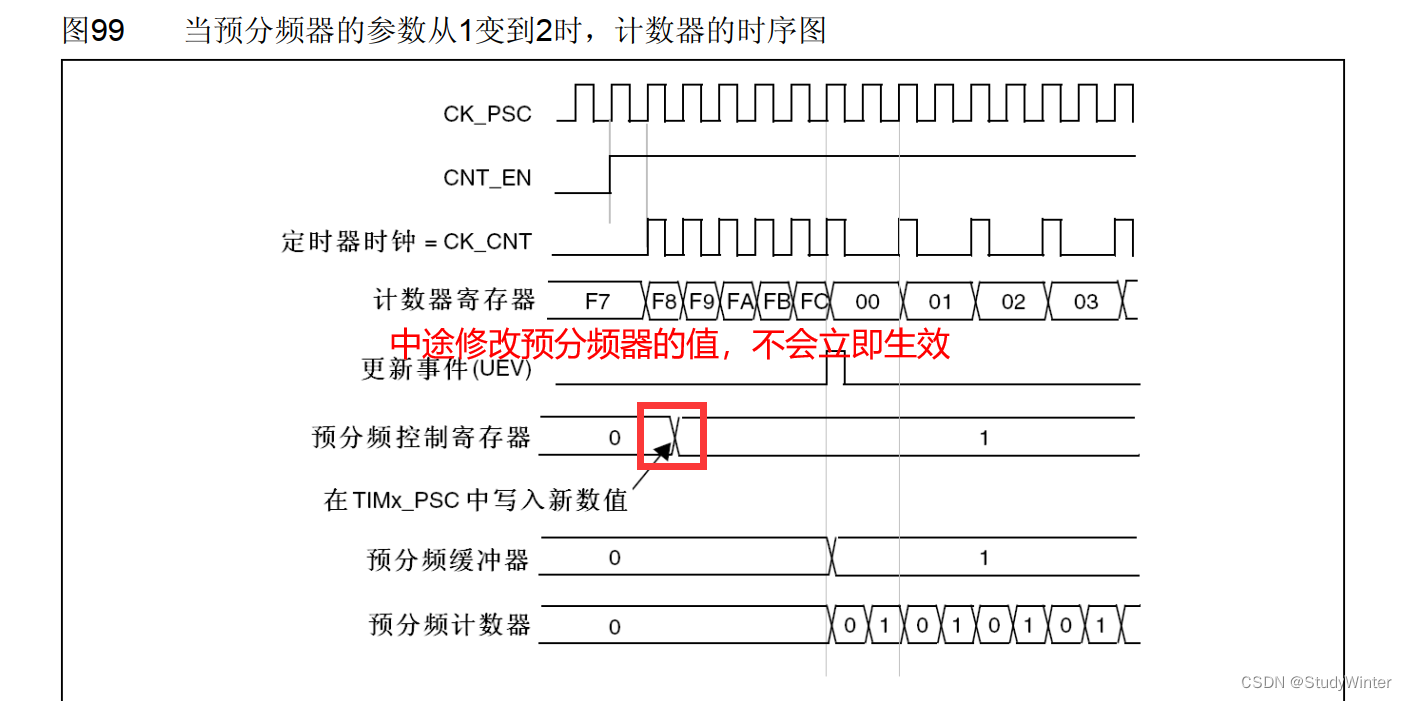
这里描述的是预分频器的一种缓冲机制,也就是预分频器实际是有两个,一个是供我们读写使用的,它并不直接决定分频系数;另外还有一个缓冲寄存器(影子寄存器),它才是真正起作用的。为了防止在一个周期中间修改了分频系数,这时这个变化不会立即生效,而是等到本次计数周期结束时产生了跟新事件,预分频器的值才会被传递到缓冲寄存器里面,这时才会生效。
最后预分频器内部实际也是靠计数来分频的。当预分频值是0时,计数器就一直为0,直接输出原频率;当预分频值为1时,计数器就一直0、1、0、1、0、1......这样计数,在回到0的时候输出一个脉冲。这样输出频率就是输入频率的二分频。预分频器的值和实际的分频系数之间有一个数的偏移。
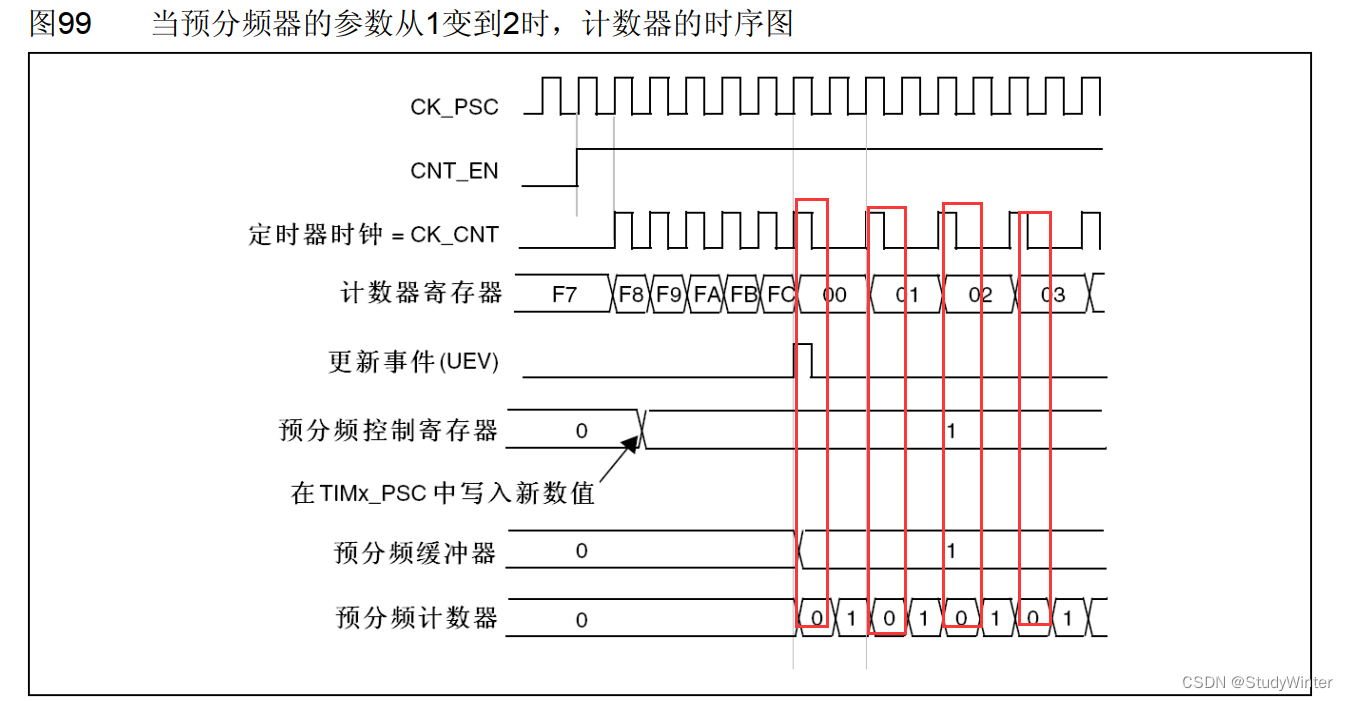
计数器时钟:CK_CNT
预分频器的输入时钟:CK_PSC
计数器计数频率:CK_CNT = CK_PSC / (PSC + 1)
PSC就是0分频、1分频、2分频......
1.2.2 计数器时序
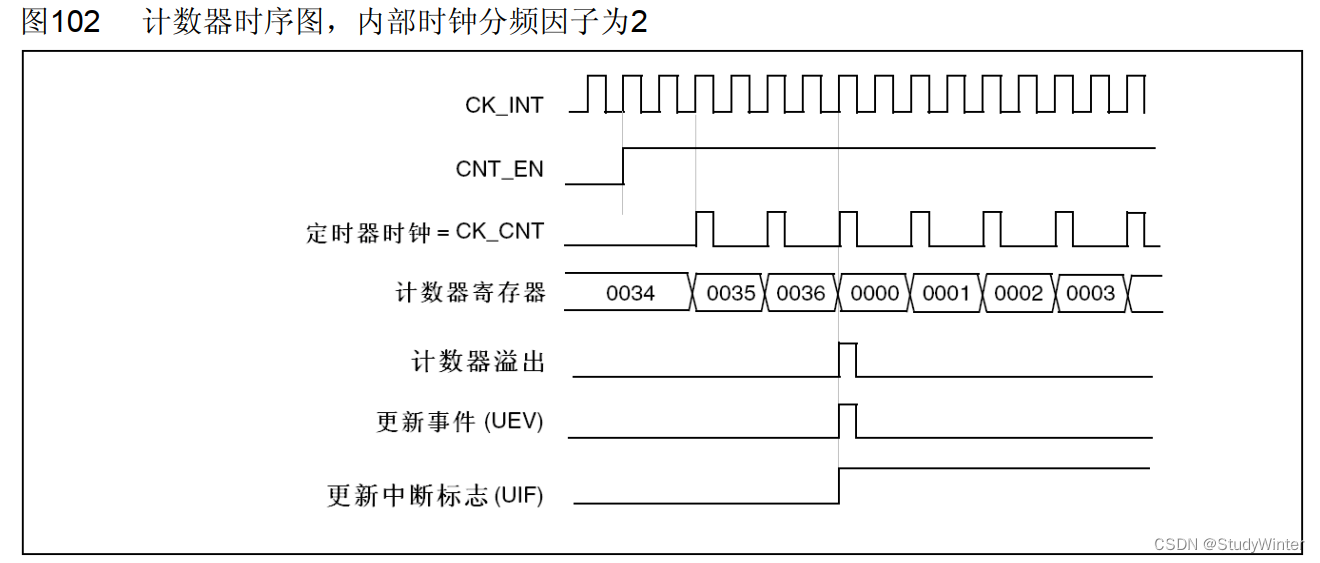
第一行CK_INT是内部时钟72MHz;
第二行是时钟使能,高电平正常运行,低电平停止运行。
第三行是计数器时钟,因为分频系数位2,所以这个分频是上面的1/2;然后第四行计数器寄存器的值在上升沿自增,增到0036时,发生溢出,此时再来一个上升沿,计数器清零,计数器溢出(第五行),产生一个更新事件脉冲(第六行),另外还会更新中断标志(UIF),这个标志位只要置1了,就会去申请中断,然后中断响应后,需要在中断程序中手动清零。
计数器溢出(中断)频率:CK_CNT_OV = CK_CNT / (ARR + 1)
= CK_PSC / (PSC + 1) / (ARR + 1)
ARR自动重装值
计数器计数频率:CK_CNT = CK_PSC / (PSC + 1)
寄存器图中有阴影的都有影子寄存器(缓冲寄存器)

1.2.3 计数器无预装时序
计数器时序图,当ARPE=0时的更新事件(TIMx_ARR没有预装入),即没有影子寄存器(缓冲寄存器)

计数器正在自增计数,突然更改自动加载寄存器,就是自动重装寄存器,由FF变成36,所以上面计到36就直接更新,开始下一轮计数。
1.2.4 计数器有预装时序
计数器时序图,当ARPE=1时的更新事件(预装入了TIMx_ARR),即有影子寄存器(缓冲寄存器)
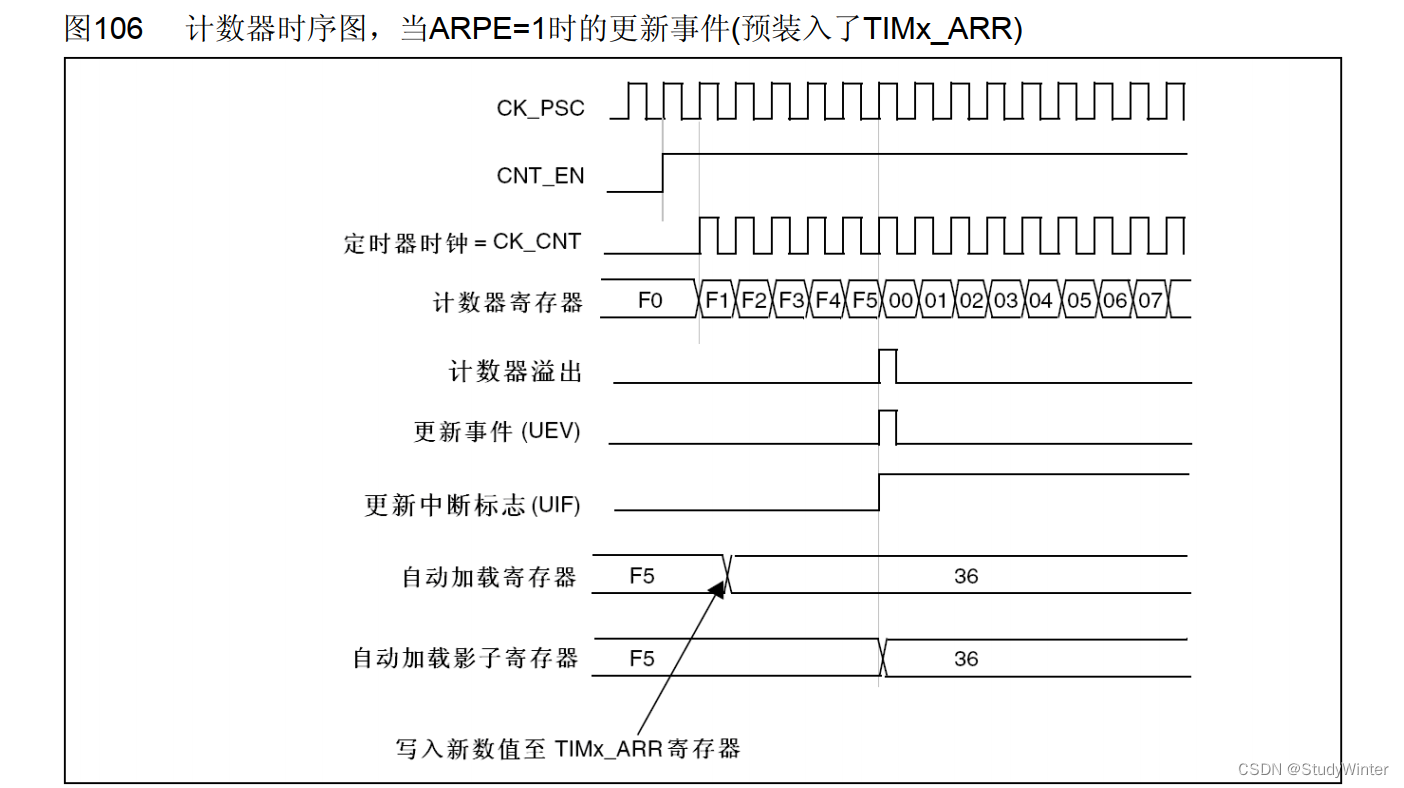
在计数的中途,把计数目标由F5改成36,下面有个影子寄存器,这个影子寄存器才是真正起作用的,它还是F5,等计数到F5时,产生更新事件;同时要更改的36才被传到影子寄存器,在下一个计数周期更改的36才有效。引入影子寄存器实际为了同步,就是让值的变化和更新事件同步发生,防止在运行中途更改造成错误。图中改成36,而F1大于36,如果没有影子寄存器,计数就会一直加,加到FF,再从0开始加到36,才能产生更新,这就造成一些小问题。
1.2.5 RCC时钟树

这个时钟树就是STM32中用来产生和配置时钟,并且把配置好的时钟发送到各个外设的系统。时钟是所有外设运行的基础,所以时钟也是最先需要配置的东西。主函数之前的SystemInit中配置时钟。
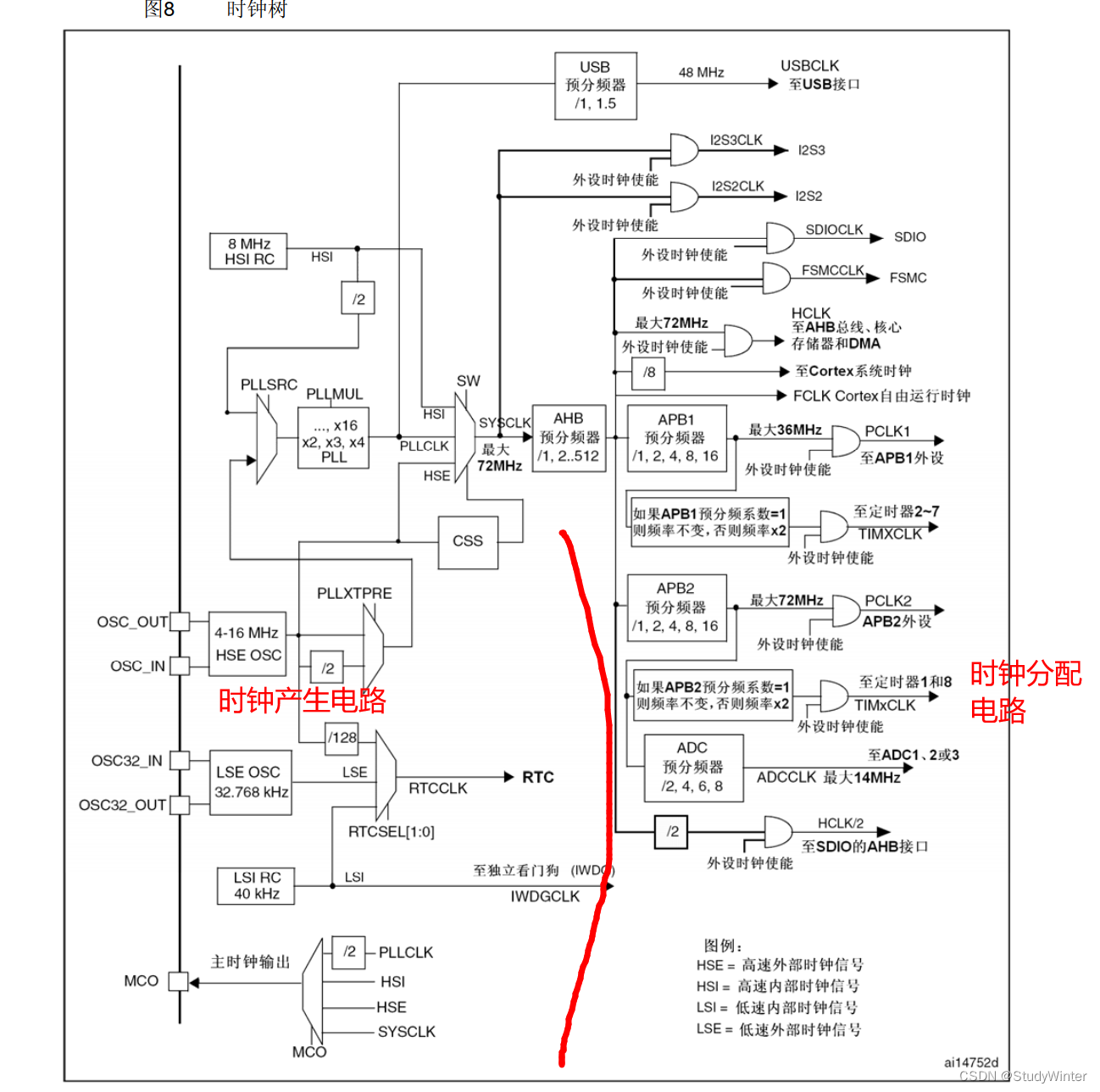
在时钟产生电路有四个振荡源,分别是:
(1)内部的8MHz高速RC振荡器(提供系统时钟);
(2)外部的4-16MHz高速石英晶体振荡器,也就是晶振,一般接8MHz(提供系统时钟);
(3)外部的32.768KHz低速晶振,一般给RTC提供时钟;
(4)最后是内部的40KHz低速RC振荡器,可以给看门狗提供时钟。
AHB、APB1、APB2的时钟都是来自前两个高速晶振。外部的石英晶振要比内部的RC振荡器更加稳定,所以一般使用外部晶振。

SystemInit配置的流程是:首先会启动内部时钟,选择内部8MHz为系统时钟,暂时以内部8MHz的时钟运行;然后再启动外部时钟,进入PLL锁相环进行倍频,8MHz的9倍是72MHz,等到锁相环输出稳定后,选择锁相环输出为系统时钟,这样就把系统时钟由8MHz切换成72MHz。
锁相环:
为什么是72MHz:
如果外部晶振出问题了,程序时钟大概慢10倍(1s到10s),会以内部的8MHz运行(不是9倍吗)
CSS(Clock Security System)时钟安全系统:负责切换时钟,可以检测外部时钟的运行状态,一旦外部时钟失效,它就会自动把外部时钟切换回内部时钟,保证系统时钟的允许,防止程序卡死造成事故。
看右边的时钟分配电路。系统时钟72MHz进入AHB总线,AHB总线有个预分频器,在SystemInit中配置的分配系数是1,那AHB的时钟就是72MHz;然后进入APB1总线,这里的配置的分配系数是2,所以APB1总线的时钟是36MHz。

之前一直说无论高级定时器、通用定时器、基本定时器时钟都是72MHz,可以看下面的分支,APB1的预分频系数如果是1,则频率不变,否则频率*2,即36 * 2 = 72MHz。
APB2的分频系数是1,所以APB2的时钟和AHB的时钟一样,都是72MHz。
外部时钟使能对应代码
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);手册
2 TIM定时器之定时器中断
2.1 接线图
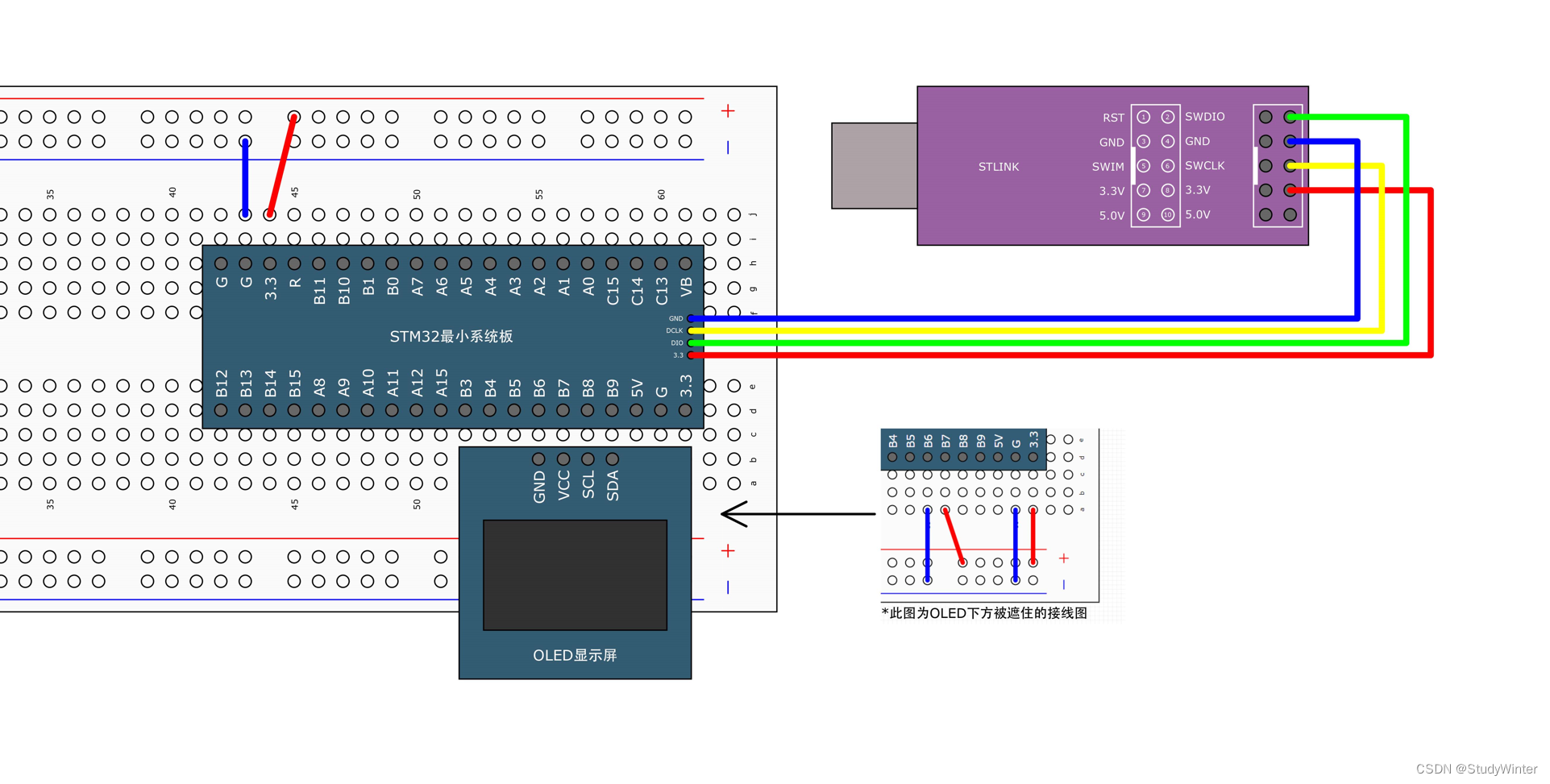
2.2 模块化
按照这个图进行初始化
步骤:
(1)RCC开启时钟;
(2)选择时基单元的时钟源(内部时钟);
(3)配置时基单元(预分频器、自动重装器、计数模式等);
(4)配置输出中断控制,允许更新中断输出到NVIC;
(5)配置NVIC,在NVIC中打开定时器中断通道,并分配一个优先级;
(6)启动计数器。
定时器的库函数
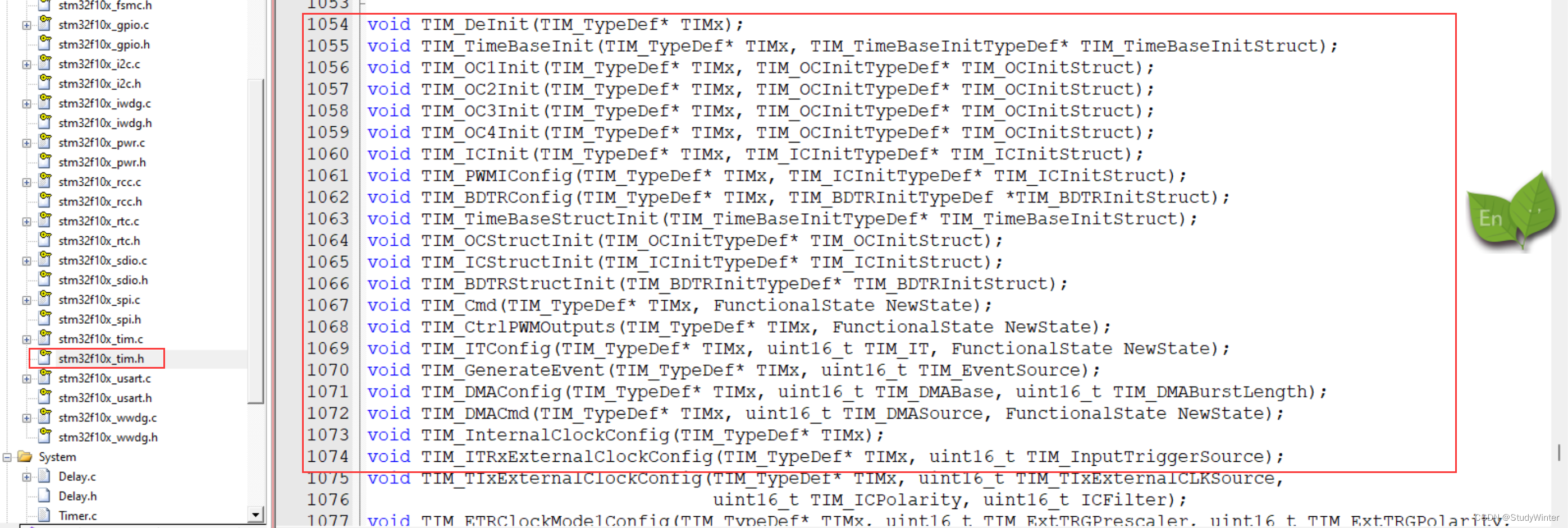
// 恢复缺省配置
void TIM_DeInit(TIM_TypeDef* TIMx);
// 时基单元初始化
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
// 给结构体变量赋默认值
void TIM_TimeBaseStructInit(TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
// 使能计数器
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);
// 使能中断输出信号
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);// 选择内部时钟
void TIM_InternalClockConfig(TIM_TypeDef* TIMx);
// 选择ITRx其他定时器的时钟
void TIM_ITRxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);
// 选择TIx捕获通道的时钟
void TIM_TIxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_TIxExternalCLKSource,uint16_t TIM_ICPolarity, uint16_t ICFilter);
// 外部时钟模式1
void TIM_ETRClockMode1Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);
// ETR外部时钟2
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);
// 配置参数
void TIM_ETRConfig(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter); // 单独写预分频值
void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode);
// 改变计数器计数模式
void TIM_CounterModeConfig(TIM_TypeDef* TIMx, uint16_t TIM_CounterMode);
// 自动重装器预装功能配置
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
// 计数器写值
void TIM_SetCounter(TIM_TypeDef* TIMx, uint16_t Counter);
// 给自动重装器写值
void TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload); // 获取计数器的值
uint16_t TIM_GetCounter(TIM_TypeDef* TIMx);
// 获取预分频器的值
uint16_t TIM_GetPrescaler(TIM_TypeDef* TIMx);
// 在主程序中获得/清除标志位
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
// 在中断函数中获得/清除标志位
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);Timer.c
#include "stm32f10x.h" // Device header// 定时器初始化
void Timer_Init(void)
{// 第一步RCC开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);// 第二步选择时基单元的时钟源(内部时钟)TIM_InternalClockConfig(TIM2);// 第三步配置时基单元(预分频器、自动重装器、计数模式等)TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 时钟分频,影响不大TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 计数模式,向上计数TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重复计数器的值// 关键参数,如果想定时1S
// CK_CNT_OV = CK_CNT / (ARR + 1)
// = CK_PSC / (PSC + 1) / (ARR + 1)
// 1 = 72000000 / (PSC + 1) / (ARR + 1)
// 1 = 72000000 / 7200 / 10000TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; // ARR自动重装器的值 两个合起来计数1秒TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; // PSC预分频器的值,7200分频,得到10k计数TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);TIM_ClearFlag(TIM2, TIM_FLAG_Update); // 防止复位从1开始// 第四步配置输出中断控制,允许更新中断输出到NVICTIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);// 第五步配置NVIC,在NVIC中打开定时器中断通道,并分配一个优先级NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 分组NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn; // 定时器2的通道NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2; // 抢占优先级NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; // 响应优先级NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; // 使能NVIC_Init(&NVIC_InitStruct);// 第六步启动计数器TIM_Cmd(TIM2, ENABLE);
}// 中断函数
//void TIM2_IRQHandler(void)
//{
// // 检测中断标志位,确保是设置的中断源触发的这个函数
// if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
// {
//
// // 清除中断标志位
// TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
// }
//}2.3 主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"// 中断函数
void TIM2_IRQHandler(void);uint16_t num;int main()
{OLED_Init(); // 初始化OLEDTimer_Init(); // 初始化定时器OLED_ShowString(1, 1, "Num:"); // 显示字符串while (1){OLED_ShowNum(1, 5, num, 5); // 显示计数OLED_ShowNum(2, 5, TIM_GetCounter(TIM2), 5); // 显示CNT计数器,最大值9999}
}// 中断函数
void TIM2_IRQHandler(void)
{// 检测中断标志位,确保是设置的中断源触发的这个函数if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){// 中断处理num++;// 清除中断标志位TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}现象:定时1s在计数
重点在这里
// 第三步配置时基单元(预分频器、自动重装器、计数模式等)TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 时钟分频,影响不大TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 计数模式,向上计数TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重复计数器的值// 关键参数,如果想定时1S
// CK_CNT_OV = CK_CNT / (ARR + 1)
// = CK_PSC / (PSC + 1) / (ARR + 1)
// 1 = 72000000 / (PSC + 1) / (ARR + 1)
// 1 = 72000000 / 7200 / 10000TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; // ARR自动重装器的值 两个合起来计数1秒TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; // PSC预分频器的值,7200分频,得到10k计数TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);TIM_ClearFlag(TIM2, TIM_FLAG_Update); 3 TIM定时器之定时器外部时钟
3.1 接线图
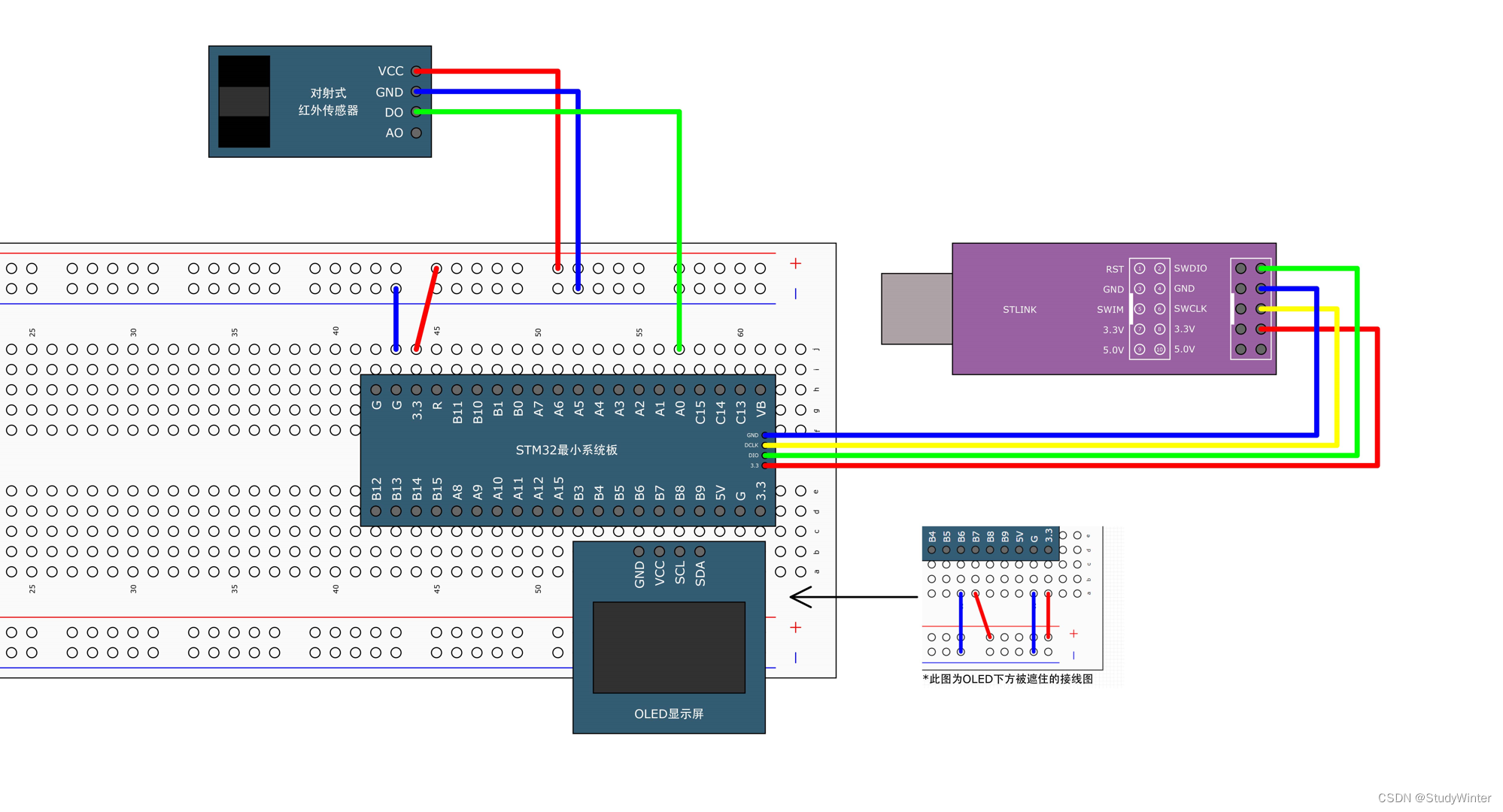
3.2 模块化
任务依然是定时中断,但是时钟部分,不使用内部时钟了,
Timer
#include "stm32f10x.h" // Device header// 定时器初始化
void Timer_Init(void)
{// 第一步RCC开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// 第二步选择时基单元的时钟源(外部时钟)// 不分频,不反向(高电平/上升沿有效),外部触发滤波器:不用TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0x00);// 第三步配置时基单元(预分频器、自动重装器、计数模式等)TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 时钟分频,影响不大TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 计数模式,向上计数TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重复计数器的值// 关键参数,如果想定时1S
// CK_CNT_OV = CK_CNT / (ARR + 1)
// = CK_PSC / (PSC + 1) / (ARR + 1)TIM_TimeBaseInitStructure.TIM_Period = 10 - 1; // ARR自动重装器的值,0-9TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; // PSC预分频器的值,不分频TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);TIM_ClearFlag(TIM2, TIM_FLAG_Update); // 防止复位从1开始// 第四步配置输出中断控制,允许更新中断输出到NVICTIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);// 第五步配置NVIC,在NVIC中打开定时器中断通道,并分配一个优先级NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 分组NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn; // 定时器2的通道NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2; // 抢占优先级NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; // 响应优先级NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; // 使能NVIC_Init(&NVIC_InitStruct);// 第六步启动计数器TIM_Cmd(TIM2, ENABLE);
}// 获取计数器的值
uint16_t Timer_GetCounter(void)
{return TIM_GetCounter(TIM2);
}// 中断函数
//void TIM2_IRQHandler(void)
//{
// // 检测中断标志位,确保是设置的中断源触发的这个函数
// if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
// {
//
// // 清除中断标志位
// TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
// }
//}3.3 主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"// 中断函数
void TIM2_IRQHandler(void);uint16_t num;int main()
{OLED_Init(); // 初始化OLEDTimer_Init(); // 初始化定时器OLED_ShowString(1, 1, "Num:"); // 显示字符串OLED_ShowString(2, 1, "Cnt:"); // 显示字符串while (1){OLED_ShowNum(1, 5, num, 5); // 显示计数OLED_ShowNum(2, 5, TIM_GetCounter(TIM2), 5); // 显示CNT计数器,最大值9999}
}// 中断函数
void TIM2_IRQHandler(void)
{// 检测中断标志位,确保是设置的中断源触发的这个函数if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){// 中断处理num++;// 清除中断标志位TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}现象:挡一下对射式红外传感器,计数器加1,加到9时,触发定时中断,定时中断加1。