一、概念介绍
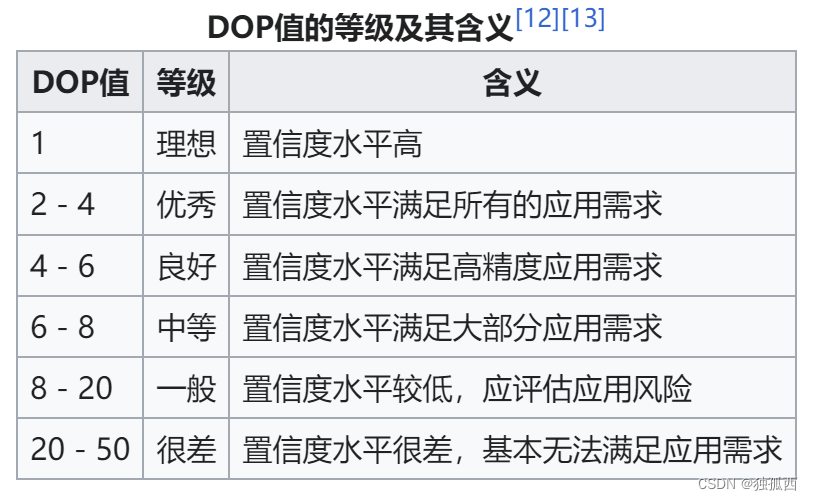
在卫星定位领域,精度衰减因子(英语:Dilution of precision)是一类衡量用户在进行GNSS测量时所具备的几何条件的定量指标,又简称为DOP值或精度因子。DOP值的大小取决各导航卫星在用户视场中的分布情况,反映了用户与卫星之间组成的几何图形对测距误差的放大作用:在相同测距精度的条件下,DOP值越低,表明该用户与卫星之间组成的几何图形越为健壮,对测距误差的放大作用越小,GNSS服务提供的导航精度越高。
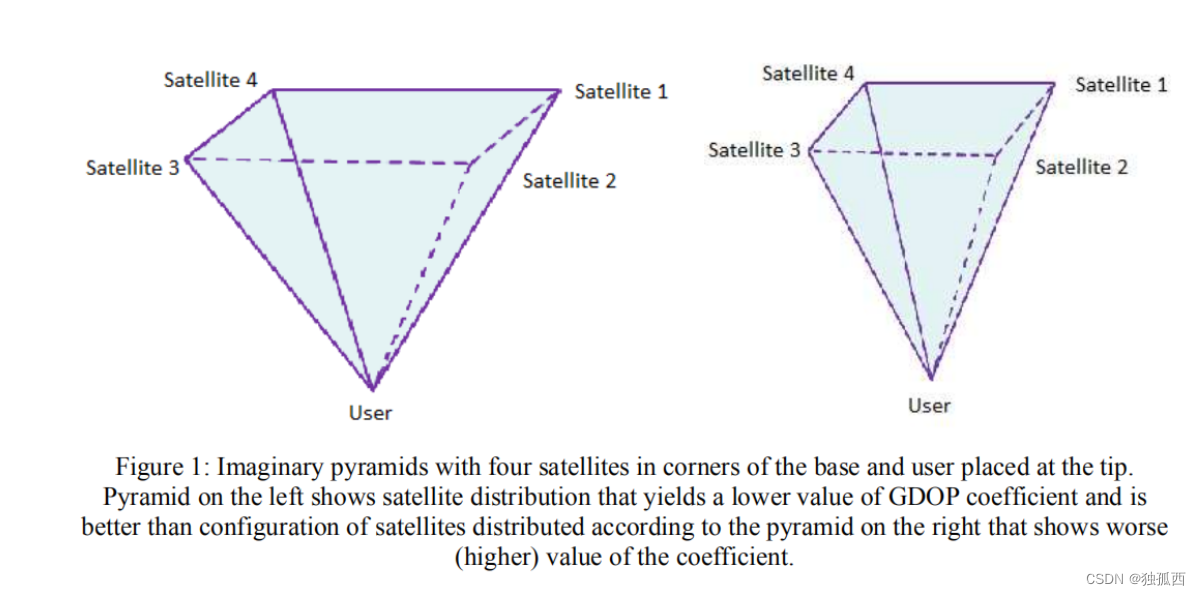
几何精度因子(Geometric Dilution Precision ,缩写为GDOP)是衡量定位精度的很重要的一个系数,它代表GPS 测距误差造成的接收机与空间卫星间的距离矢量放大因子。实际表征参与定位解的从接收机至空间卫星的单位矢量所勾勒的形体体积与GDOP成反比,故又称为几何精度因子。GDOP的数值越大,所代表的单位矢量形体体积越小,即接收机至空间卫星的角度十分相似导致的结果,此时的GDOP会导致定位精度变差。好的GDOP, 是指其数值小,代表大的单位矢量形体体积,导致高的定位精度。好的几何因子实际上是指卫星在空间分布不集中于一个区域,同时能在不同方位区域均匀分布。
二、数学推导
为构建一个符合DOP值定义的简单模型,假设各观测值包含的测距误差是相互独立且大小相等的,这样的测距误差通常以用户等效测距误差(User Equivalent Range Error, UERE) 表示,即:
式中为
维的单位矩阵。根据协因数传播律,有:
此时,用户总的定位和授时误差以各参数的方差描述,以几何误差为例,其大小等于参数的方差之和的平方根,也即矩阵
的迹
的平方根:
因而,可定义精度衰减因子为该几何误差和测距误差
的比值:
该DOP值也被称作几何精度衰减因子(英语: Geometric Dilution of Precision),简称GDOP值。
若将矩阵展开作:
GDOP值亦可表示为:
类似地,还可定义与其他误差项关联的精度衰减因子,如与点位误差相关的点位精度衰减因子 Position Dilution of Precision,PDOP)、与平面误差
相关的平面精度衰减因子 (Horizontal Dilution of Precision,HDOP)、与高程误差
相关的高程精度衰减因子 (Vertical Dilution of Precision,VDOP)、与接收机钟差误差
相关的时间精度衰减因子 Time Dilution of Precision, TDOP) 等等:
由各表达式可以得出,上述DOP间满足如下关系:
根据上述HDOP因子的计算公式,由数学归纳法,推导HDOP的极限值是
其中N是基站个数。
三、应用总结
在实际应用中,DOP值常用于GNSS测量时间段的规划,或者是在接收机能观测的最大卫星数量受限时挑选视场中的卫星以构成更佳的几何图形。在使用GNSS进行工程测量等应用时,通常也会对DOP值的最大值作出要求,如中国大陆使用的国家标准GB 50026-2007《工程测量规范》中即要求:“四等及以上等级限定为 PDOP≤6,一、二级限定为 PDOP≤8”。
几何定位方法中,多个基站和移动台之间的相对距离将很大程度上决定定位的准确度。这个影响因子就叫做精度因子DOP(dilution of precision,精度衰减因子)。
GDOP(Geometric dilution of precision)几何精度因子:包括经度,纬度,高程和时间等因子,称为几何精度因子。
PDOP(position dilution of precision)三维位置精度因子:为纬度、经度和高程等误差平方和的开根号值。
HDOP(horizontal dilution of precision)水平分量精度因子:为纬度和经度等误差平方和的开根号值。
VDOP(vertical dilution of precision)垂直分量精度因子。
TDOP(time dilution of precision)钟差精度因子:为接收仪内时表偏移误差值。
参考资料:
维基百科:https://zh.wikipedia.org/wiki/%E7%B2%BE%E5%BA%A6%E8%A1%B0%E5%87%8F%E5%9B%A0%E5%AD%90
网络资源








![[架构之路-254]:目标系统 - 设计方法 - 软件工程 - 软件设计 - 架构设计 - 全程概述](https://img-blog.csdnimg.cn/direct/8bb61a84b2f44a59a408b09402a8bdaf.png)

