1 几何图形检测介绍
1.1 轮廓(contours)
什么是轮廓,简单说轮廓就是一些列点相连组成形状、它们拥有同样的颜色、轮廓发现在图像的对象分析、对象检测等方面是非常有用的工具,在OpenCV
中使用轮廓发现相关函数时候要求输入图像是二值图像,这样便于轮廓提取、边缘提取等操作。轮廓发现的函数与参数解释如下:
函数原型:
findContours(image, mode, method, contours=None, hierarchy=None, offset=None)参数:
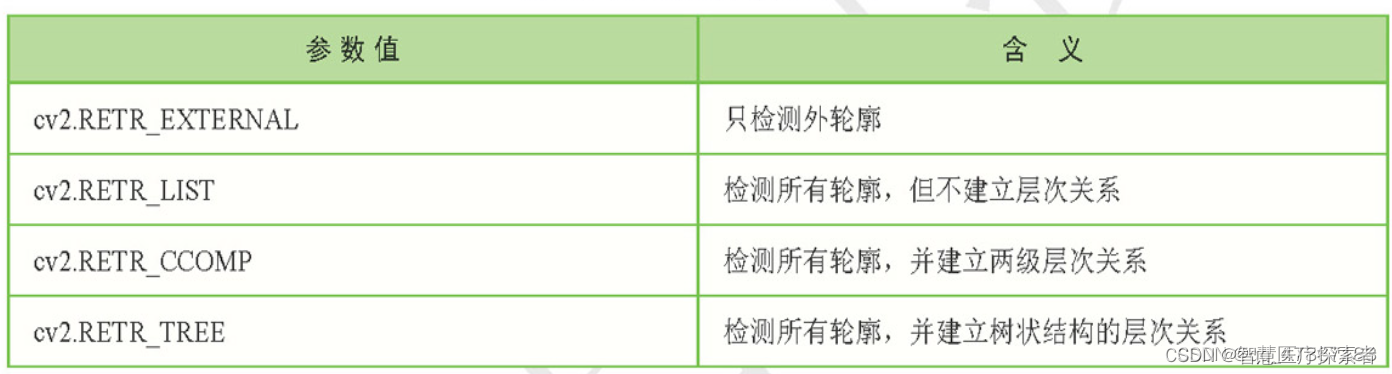
image输入/输出的二值图像mode 迒回轮廓的结构、可以是List、Tree、Externalmethod 轮廓点的编码方式,基本是基于链式编码contours 迒回的轮廓集合hieracrchy 迒回的轮廓层次关系offset 点是否有位移

1.2 多边形逼近
多边形逼近,是通过对轮廓外形无限逼近,删除非关键点、得到轮廓的关键点,不断逼近轮廓真实形状的方法,OpenCV中多边形逼近的函数与参数解释如下:
函数原型:
approxPolyDP(curve, epsilon, closed, approxCurve=None)参数:
curve 表示输入的轮廓点集合epsilon 表示逼近曲率,越小表示相似逼近越厉害close 是否闭合
1.3 几何距计算
图像几何距是图像的几何特征,高阶几何距中心化之后具有特征不变性,可以产生Hu距输出,用于形状匹配等操作,这里我们通过计算一阶几何距得到指定轮廓的中心位置,计算几何距的函数与参数解释如下:
函数原型:
moments(array, binaryImage=None)参数:
array表示指定输入轮廓binaryImage默认为None
2 基于opencv实现几何图形检测
整个代码实现分为如下几步完成
- 加载图像,
- 图像二值化
- 轮廓发现
- 几何形状识别
- 测量周长、面积、计算中心
- 颜色提取
2.1 加载图像并进行二值化处理
的二值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,常用的方法就是设定一个阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。这是研究灰度变换的最特殊的方法,称为图像的二值化(Binarization)。
函数原型:
def threshold(src: Any,thresh: Any,maxval: Any,type: Any,dst: Any = None) -> Nonesrc:源图像,可以为8位的灰度图,也可以为32位的彩色图像。(两者由区别)
dst:输出图像
thresh:阈值
maxval:dst图像中最大值
type:阈值类型,可以具体类型如下:
enum ThresholdTypes {THRESH_BINARY = 0, //黑白
THRESH_BINARY_INV = 1, //黑白反转
THRESH_TRUNC = 2, //得到图像多像素值
THRESH_TOZERO = 3, //当前点值大于阈值时,不改
变,否则设置为0
THRESH_TOZERO_INV = 4, //当前点值大于阈值时,
设置为0,否则不改变
THRESH_MASK = 7,
THRESH_OTSU = 8, //自适应阈值
THRESH_TRIANGLE = 16
};
具体实现代码:
frame = cv.imread("./data/jihe2.png")# 二值化图像
gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY)
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)
cv.imshow("input image", frame)2.2 轮廓检测与逼近
当需要对图像进行形状分析时,需要使用多边形逼近一个轮廓,使得顶点数目变少,算法原理比较简单,核心就是不断找多边形最远的点加入形成新的多边形,直到最短距离小于指定的精度。OpenCV里面用函数approxPolyDP()实现。approxPolyDP()用另一条顶点较少的曲线来逼近一条曲线或者一个多边形,这样两条曲线之间的距离小于或等于指定的精度。同时也有使闭合逼近曲线的选项(那就是说,起始点和终止点相同)。
findContours后的轮廓信息contours可能过于复杂不平滑,可以用approxPolyDP函数对该多边形曲线做适当近似,approxPolyDP 主要功能是把一个连续光滑曲线折线化,对图像轮廓点进行多边形拟合。
具体实现代码:
contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
for cnt in range(len(contours)):# 提取与绘制轮廓cv.drawContours(result, contours, cnt, (0, 255, 0), 2)# 轮廓逼近epsilon = 0.01 * cv.arcLength(contours[cnt], True)approx = cv.approxPolyDP(contours[cnt], epsilon, True)2.3 几何形状判断
根据corners数量对形状进行判断。
approx = cv.approxPolyDP(contours[cnt], epsilon, True)# 分析几何形状
corners = len(approx)
shape_type = ""if corners < 3:continueif corners == 3:count = self.shapes['triangle']count = count + 1self.shapes['triangle'] = countshape_type = "三角形"
if corners == 4:count = self.shapes['rectangle']count = count + 1self.shapes['rectangle'] = countshape_type = "矩形"
if corners >= 10:count = self.shapes['circles']count = count + 1self.shapes['circles'] = countshape_type = "圆形"
if 4 < corners < 10:count = self.shapes['polygons']count = count + 1self.shapes['polygons'] = countshape_type = "多边形"2.4 面积周长计算
# 计算面积与周长
p = cv.arcLength(contours[cnt], True)
area = cv.contourArea(contours[cnt])
print("周长: %.3f, 面积: %.3f 颜色: %s 形状: %s " % (p, area, color_str, 2.5 完整代码:
import cv2 as cv
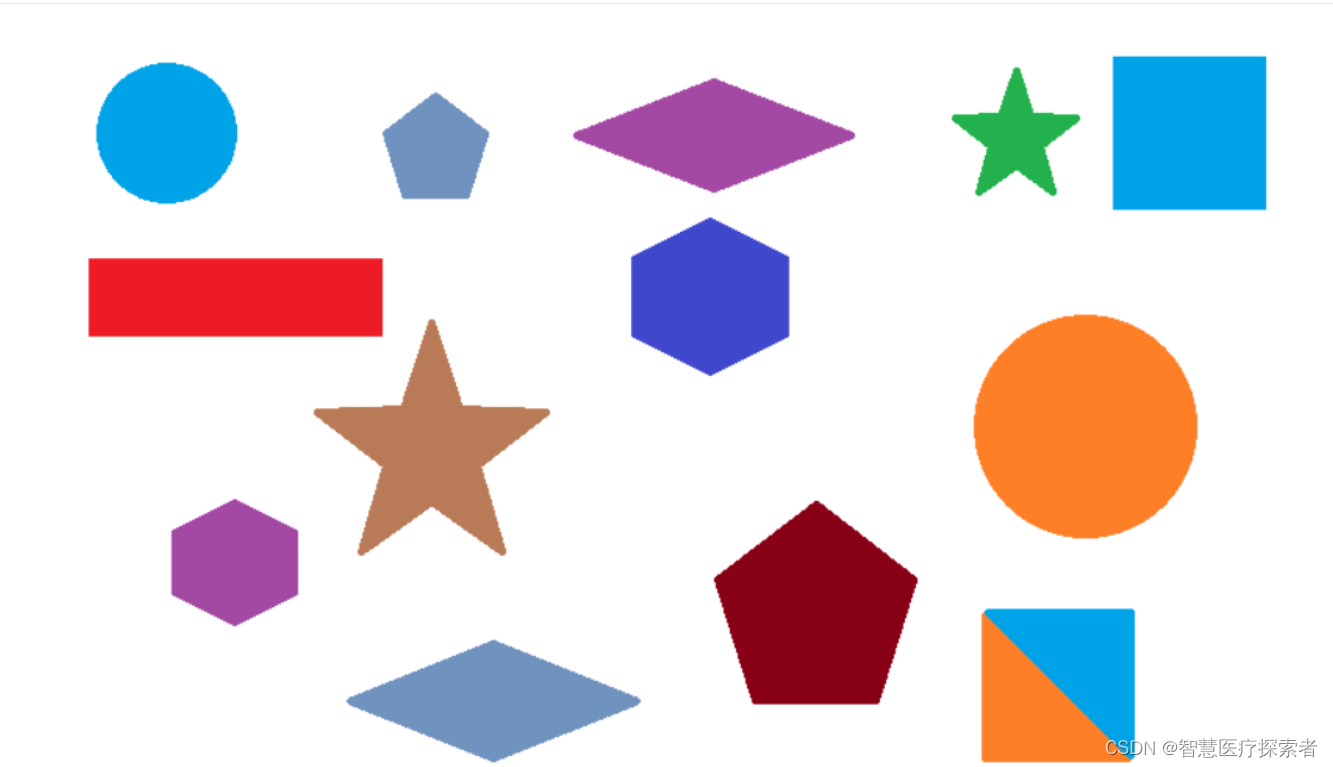
import numpy as npclass ShapeAnalysis:def __init__(self):self.shapes = {'triangle': 0, 'rectangle': 0, 'polygons': 0, 'circles': 0}def analysis(self, frame):h, w, ch = frame.shaperesult = np.zeros((h, w, ch), dtype=np.uint8)# 二值化图像print("start to detect lines...\n")gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY)ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)cv.imshow("input image", frame)contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)for cnt in range(len(contours)):# 提取与绘制轮廓cv.drawContours(result, contours, cnt, (0, 255, 0), 2)# 轮廓逼近epsilon = 0.01 * cv.arcLength(contours[cnt], True)approx = cv.approxPolyDP(contours[cnt], epsilon, True)# 分析几何形状corners = len(approx)shape_type = ""if corners < 3:continueif corners == 3:count = self.shapes['triangle']count = count + 1self.shapes['triangle'] = countshape_type = "三角形"if corners == 4:count = self.shapes['rectangle']count = count + 1self.shapes['rectangle'] = countshape_type = "矩形"if corners >= 10:count = self.shapes['circles']count = count + 1self.shapes['circles'] = countshape_type = "圆形"if 4 < corners < 10:count = self.shapes['polygons']count = count + 1self.shapes['polygons'] = countshape_type = "多边形"# 求解中心位置mm = cv.moments(contours[cnt])if mm['m00'] == 0:continuecx = int(mm['m10'] / mm['m00'])cy = int(mm['m01'] / mm['m00'])cv.circle(result, (cx, cy), 3, (0, 0, 255), -1)# 颜色分析color = frame[cy][cx]color_str = "(" + str(color[0]) + ", " + str(color[1]) + ", " + str(color[2]) + ")"# 计算面积与周长p = cv.arcLength(contours[cnt], True)area = cv.contourArea(contours[cnt])print("周长: %.3f, 面积: %.3f 颜色: %s 形状: %s " % (p, area, color_str, shape_type))cv.imshow("Analysis Result", result)print("triangle: ", self.shapes['triangle'])print("rectangle: ", self.shapes['rectangle'])print("polygons: ", self.shapes['polygons'])print("circles: ", self.shapes['circles'])return self.shapesif __name__ == "__main__":src = cv.imread("./data/jihe2.png")ld = ShapeAnalysis()ld.analysis(src)cv.waitKey(0)cv.destroyAllWindows()原始图像:
运行结果显示:
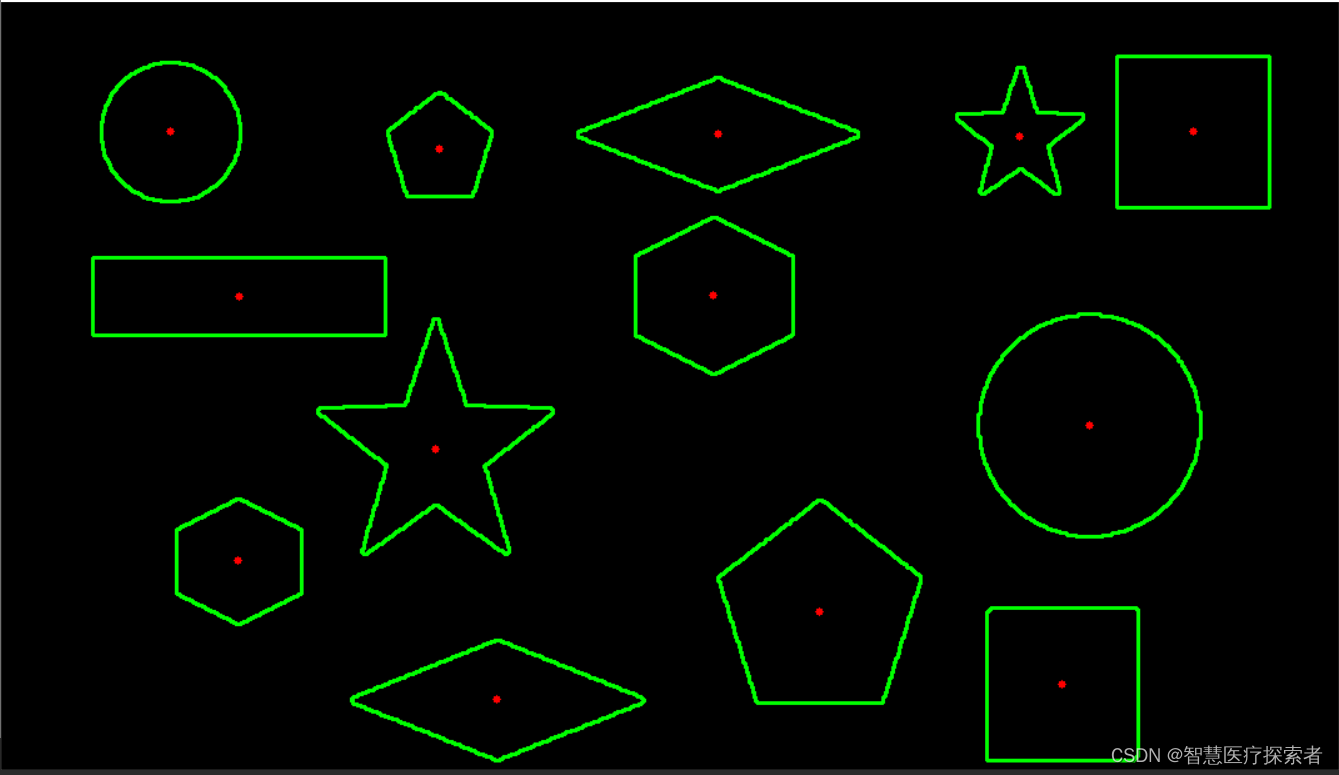
周长: 553.973, 面积: 11687.500 颜色: (190, 146, 112) 形状: 矩形
周长: 479.556, 面积: 14743.500 颜色: (232, 162, 0) 形状: 矩形
周长: 543.144, 面积: 18333.500 颜色: (21, 0, 136) 形状: 多边形
周长: 341.421, 面积: 7593.000 颜色: (164, 73, 163) 形状: 多边形
周长: 761.796, 面积: 13221.500 颜色: (87, 122, 185) 形状: 圆形
周长: 594.257, 面积: 24703.500 颜色: (39, 127, 255) 形状: 圆形
周长: 592.000, 面积: 14508.000 颜色: (36, 28, 237) 形状: 矩形
周长: 432.291, 面积: 11939.500 颜色: (204, 72, 63) 形状: 多边形
周长: 280.451, 面积: 4917.000 颜色: (190, 146, 112) 形状: 多边形
周长: 531.588, 面积: 10587.000 颜色: (164, 73, 163) 形状: 矩形
周长: 405.262, 面积: 4172.500 颜色: (76, 177, 34) 形状: 圆形
周长: 370.191, 面积: 9746.000 颜色: (232, 162, 0) 形状: 圆形
周长: 486.000, 面积: 14762.000 颜色: (232, 162, 0) 形状: 矩形
triangle: 0
rectangle: 5
polygons: 4
circles: 4