红黑树
红黑树 ,是一种 二叉搜索树 ,但 在每个结点上增加一个存储位表示结点的颜色,可以是 Red 或
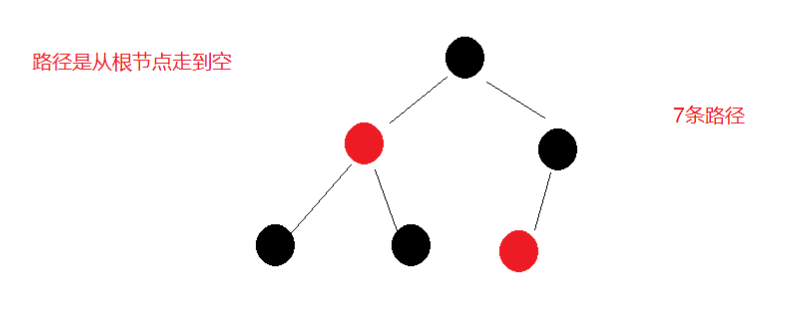
Black 。 通过对 任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路
径会比其他路径长出俩倍 ,因而是 接近平衡 的
对比AVL树的严格平衡(左右子树高度差不超过1),需要更多的旋转才能控制这个高度
红黑树是近似平衡(最长路径不超过最短路径的2倍) 降低了插入和旋转的次数,
所以在经常进行增删的结构中性能比 AVL 树更优,而且红黑树实现比较简单,所以实际运用中红
黑树更多
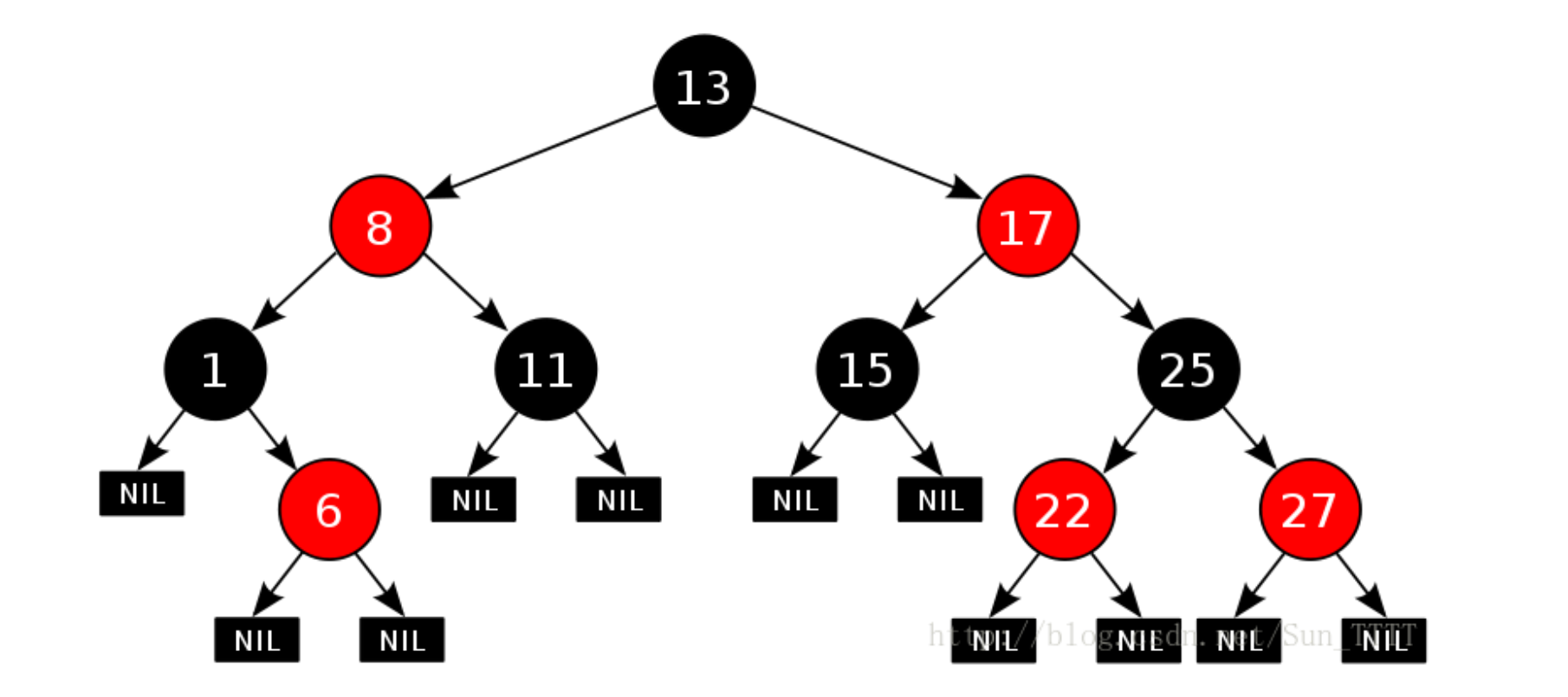
红黑树的性质
1. 每个结点不是 红色 就是黑色
2. 根节点 是 黑色 的
3. 如果一个节点是红色的,则它的两个孩子结点是黑色的 ,即 不能出现连续的红节点
父子节点:黑+黑 黑+红 红+黑
4. 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均 包含相同数目的黑色结点
即 每条路径都包含相同数量的黑节点
5. 每个叶子结点都是黑色的 ( 此处的叶子结点指的是空结点 )
即NIL节点,方便数路径,不容易出错

红黑树的插入
新增节点的颜色默认给红色
因为新增节点若为黑色节点,插入后会影响所有路径(红黑树的性质规定每条路径必须有相同数量的黑色节点)
而新增插入红色节点只会影响父节点,(父子节点的组合:黑+黑,黑+红,红+黑)
(若父节点为黑,则无影响,若父节点为红,则有连续的红节点,需要调整,下面会讲)

红黑树节点的设计:
enum Colour
{RED,BLACK
};template<class T> // T可以是set的K,可以是map的pair<K,V>
struct RBTreeNode
{RBTreeNode<T>* _left;RBTreeNode<T>* _right; RBTreeNode<T>* _parent;T _data;Colour _col;RBTreeNode(const T& data):_left(nullptr),_right(nullptr),_parent(nullptr),_data(data),_col(RED)//新增节点默认给红色{}
}; 红黑树是在二叉搜索树的基础上加上其平衡限制条件,故而红黑树的插入分为两步:
1 插入新增节点
2 判断新增节点插入后是否需要调整红黑树
(新增节点可能会导致连续红节点的出现,破坏了红黑树的规则)
什么时候需要调整红黑树:出现了连续的红节点,即新增节点的父节点为红色节点时
(新增节点默认为红,若父节点为黑,则没有违反红黑树的任何规则,插入完成后无需处理)
约定 :cur 为当前节点, p 为父节点, g 为祖父节点, u 为叔叔节点
红黑树的调整关键看叔叔节点
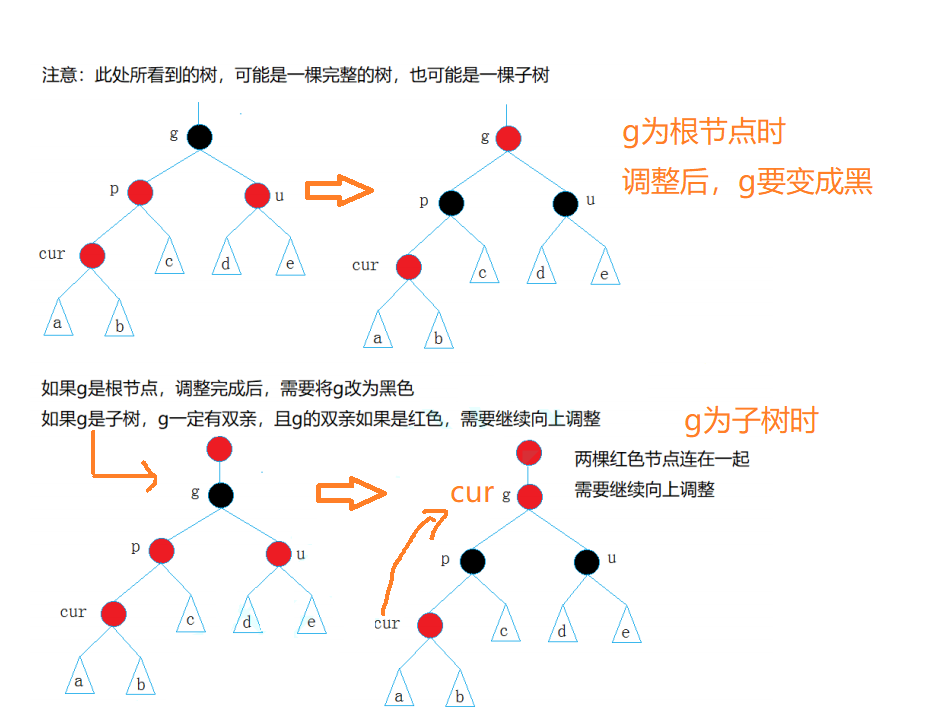
情况一 : cur 为红, p 为红, g 为黑, u存在且为红
(因为在cur插入之前,没有违反红黑树的任何规则,所以当p为红时,g一定为黑,不可能出现连续的红色节点)
解决方式 :将 p,u 改为黑, g 改为红,然后把 g 当成 cur ,继续向上调整
情况二: cur为红,p为红,g为黑,u不存在/u存在且为黑
在这种情况下,单纯变色无法解决问题,需要旋转+变色
解决方案:旋转(单选/双旋)+变色
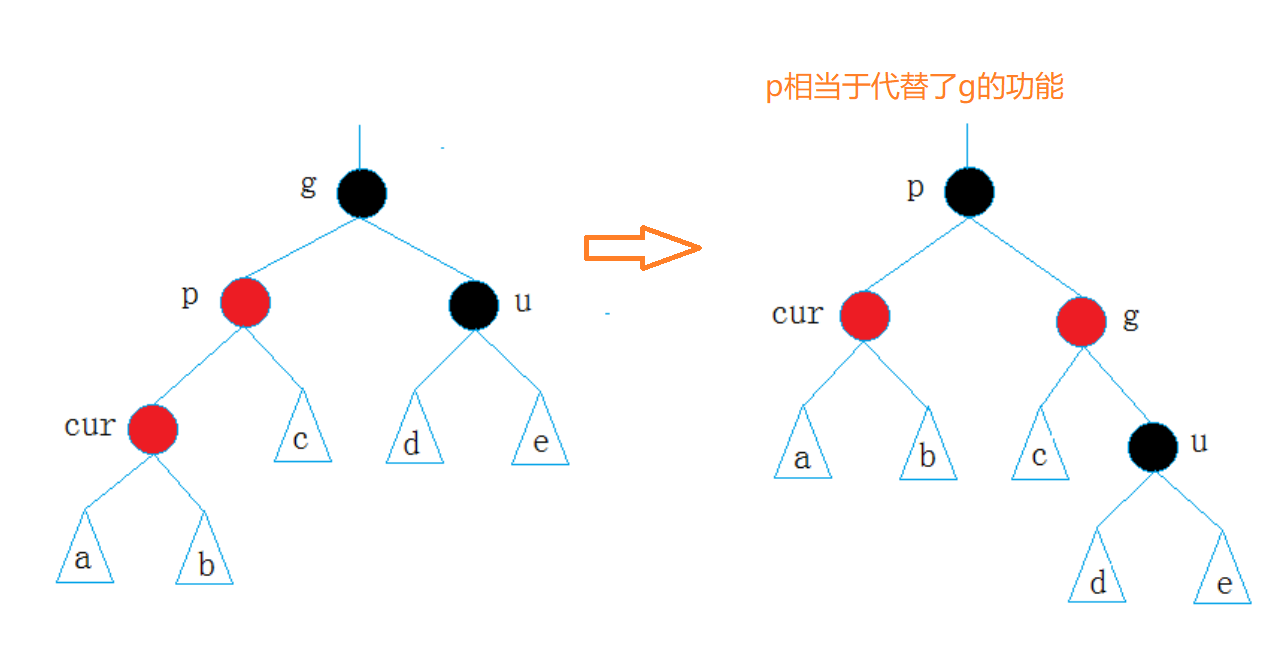
需要 单旋 时的情况:
p 为 g 的左孩子, cur 为 p 的左孩子,则进行右单旋
p 为 g 的右孩子, cur 为 p 的右孩子,则进行左单旋
p 、 g 变色 -- p变黑,g变红
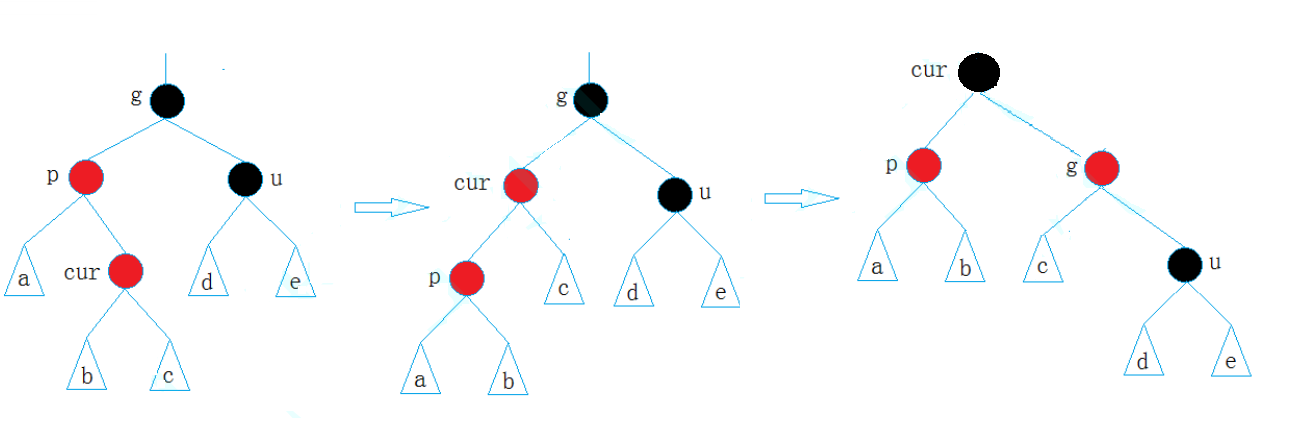
需要双旋时的情况:
p 为 g 的左孩子, cur 为 p 的右孩子,则进行左右双旋
(先对p节点所在子树左单旋,再对g节点所在子树右单旋)
p 为 g 的右孩子, cur 为 p 的左孩子,则进行右左双旋
(先对p节点所在子树右单旋,再对g节点所在子树左单旋)
cur,g变色-- cur变黑,g变红
代码实现:
pair<Node*, bool> Insert(const T& data){//插入一个红色节点if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return make_pair(_root, true);}Node* cur = _root;Node* parent = nullptr;KeyOfT kot;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return make_pair(cur, false);}}//新增节点给红色cur = new Node(data);Node* newnode = cur;if (kot(parent->_data)>kot(data)){parent->_left = cur;cur->_parent = parent;}else{parent->_right = cur;cur->_parent = parent;}//红黑树调整--有连续的红节点while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){// g// p u// cNode* uncle = grandfather->_right;if (uncle && uncle->_col == RED)//uncle存在且为红--变色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续向上调整cur = grandfather;parent = cur->_parent;}else//uncle不存在或者存在且为黑--旋转+变色{if (cur == parent->_left)//右单旋{// g// p// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else//左右双旋{// g// p// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else//parent == grandfather->_right{// g// u p // cNode* uncle = grandfather->_left;if (uncle && uncle->_col == RED)//uncle存在且为红--变色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续向上调整cur = grandfather;parent = cur->_parent;}else//uncle不存在或者存在且为黑--旋转+变色{if (cur == parent->_right)//左单旋{RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else//右左双旋{// g// u p // cRotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return make_pair(newnode, true);}
需要用到的左单旋 右单旋:(在AVL数的代码实现中有具体讲解)
void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL){subRL->_parent = parent;}Node*parentParent = parent->_parent;parent->_parent = subR;subR->_left = parent;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subR;}else{parentParent->_right = subR;}subR->_parent = parentParent;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* parentParent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subL;}else{parentParent->_right = subL;}subL->_parent = parentParent;}}
红黑树的验证
1. 验证 其是否满足二叉搜索树 ( 中序遍历是否为有序序列 )
2. 验证 其是否满足红黑树的性质
bool IsBalance(){//检查根节点if (_root == nullptr)return true;if (_root->_col == RED)return false;//检查是否有连续的红节点+每条路径的黑色节点数目是否一样int refVal = 0;//参考值Node* cur = _root;while (cur)//以最左边的路径上的黑色节点数目为参考值{if (cur->_col == BLACK)refVal++;cur = cur->_left;}int blacknum = 0;return Check(_root, refVal, blacknum);}bool Check(Node* root, const int refVal,int blacknum){if (root == nullptr){if (blacknum != refVal){cout << "存在黑色节点数量不相等的路径" << endl;return false;}return true;}if (root->_col == BLACK)//节点为黑色--统计{blacknum++;}if(root->_col == RED && root->_parent->_col == RED)//节点为红色--检查{cout << "有连续的红色节点" << endl;return false;}return Check(root->_left, refVal, blacknum)&& Check(root->_right, refVal, blacknum);}
红黑树模拟实现map与set
代码:
MyMap.h
#pragma once
#include"RBTree.h"namespace djx
{template<class K,class V>class map{public:struct MapKeyOfT//获取关键字K,map存储的是pair<K,V>{const K& operator()(const pair<K, V>&kv){return kv.first;}};// 对类模板取内嵌类型,加typename告诉编译器这里是类型typedef typename RBTree<K, pair<const K, V> ,MapKeyOfT>::iterator iterator;typedef typename RBTree<K, pair<const K, V> ,MapKeyOfT>::const_iterator const_iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}V& operator[](const K&key){pair<iterator, bool> ret = insert(make_pair(key, V()));return ret.first->second;//ret.first是迭代器,能够找到节点}pair<iterator, bool> insert(const pair<K, V>&kv){return _t.Insert(kv);}private:RBTree<K, pair<const K, V> ,MapKeyOfT> _t;//封装红黑树};
}MySet.h
#pragma once
#include"RBTree.h"namespace djx
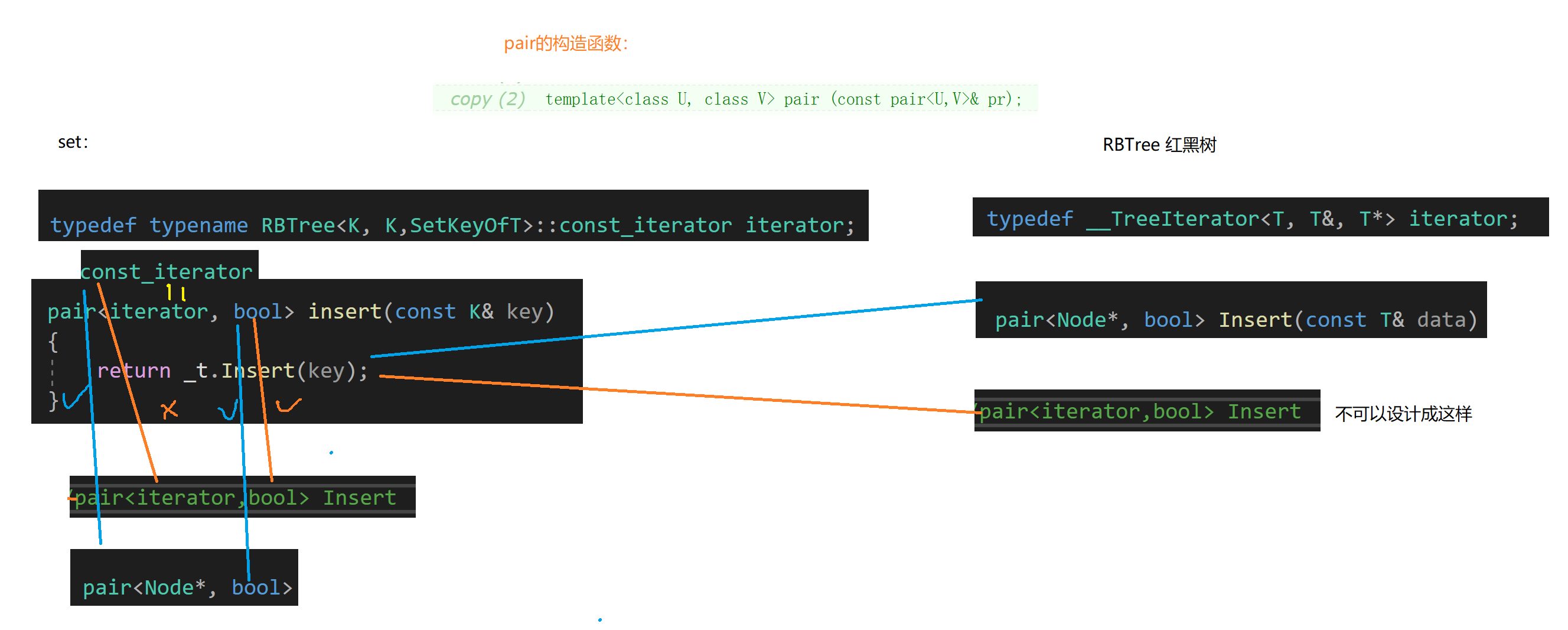
{template<class K>class set{public:struct SetKeyOfT//仿函数,返回关键字K,set存储的就是K{const K& operator()(const K& key){return key;}};typedef typename RBTree<K, K,SetKeyOfT>::const_iterator iterator;//set中的元素不可被修改,所以普通迭代器就用const_iterator来实现typedef typename RBTree<K, K, SetKeyOfT>::const_iterator const_iterator;iterator begin()const{return _t.begin();}iterator end() const{return _t.end();}pair<iterator, bool> insert(const K& key){return _t.Insert(key);}private:RBTree<K, K, SetKeyOfT> _t;};
}RBTree.h
#pragma once// set ->key
// map ->key/value
enum Colour
{RED,BLACK
};template<class T>
struct RBTreeNode//节点
{RBTreeNode<T>* _left;RBTreeNode<T>* _right; RBTreeNode<T>* _parent;T _data;Colour _col;RBTreeNode(const T& data):_left(nullptr),_right(nullptr),_parent(nullptr),_data(data),_col(RED){}
};template<class T,class Ref,class Ptr>
struct __TreeIterator//迭代器
{typedef RBTreeNode<T> Node;typedef __TreeIterator<T, Ref, Ptr> Self;Node* _node;__TreeIterator(Node* node):_node(node){}Ref operator* (){return _node->_data;}Ptr operator->(){return &_node->_data;}Self& operator++(){//顺序:左 中 右if (_node->_right)//这颗子树没有走完--找右子树的最左节点{Node* cur = _node->_right;while (cur->_left){cur = cur->_left;}_node = cur;}else//这颗子树已经走完--找一个祖先(这个子树是它左孩子的祖先){Node* cur = _node;Node* parent = cur->_parent;while (parent && parent->_right == cur){cur = parent;parent = cur->_parent;}_node = parent;}return *this;}bool operator!=(const Self& s){return s._node != _node;}bool operator==(const Self& s){return s._node == _node;}
};template<class K,class T,class KeyOfT>
class RBTree
{typedef RBTreeNode<T> Node;
public:typedef __TreeIterator<T, T&, T*> iterator;typedef __TreeIterator<T, const T&, const T*> const_iterator;iterator begin()//红黑树中序序列得到有序序列,begin()可设计成最左节点的迭代器{Node* cur = _root;while (cur && cur->_left){cur = cur->_left;}return iterator(cur);}iterator end(){return iterator(nullptr);}const_iterator begin()const{Node* cur = _root;while (cur&& cur->_left){cur = cur->_left;}return const_iterator(cur);}const_iterator end()const{return const_iterator(nullptr);}//返回值不能是pair<iterator, bool>,因为set的普通迭代器实际也是const_iterator,set设计insert时要返回的pair<iterator, bool> 实际是pair<const_iterator, bool> ,而封装红黑树,复用红黑树的Insert(返回值若是pair<iterator, bool>,红黑树的普通迭代器就是普通迭代器,那么因为普通迭代器iterator不能转成const_iterator,所以代码会报错)
设计成pair<Node*, bool>就很好,节点指针Node*可以通过const_iterator迭代器的构造函数完成转变pair<Node*, bool> Insert(const T& data){//插入一个红色节点if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return make_pair(_root, true);}Node* cur = _root;Node* parent = nullptr;KeyOfT kot;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return make_pair(cur, false);}}//新增节点给红色cur = new Node(data);Node* newnode = cur;if (kot(parent->_data)>kot(data)){parent->_left = cur;cur->_parent = parent;}else{parent->_right = cur;cur->_parent = parent;}//红黑树调整--有连续的红节点while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){// g// p u// cNode* uncle = grandfather->_right;if (uncle && uncle->_col == RED)//uncle存在且为红--变色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续向上调整cur = grandfather;parent = cur->_parent;}else//uncle不存在或者存在且为黑--旋转+变色{if (cur == parent->_left)//右单旋{// g// p// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else//左右双旋{// g// p// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else//parent == grandfather->_right{// g// u p // cNode* uncle = grandfather->_left;if (uncle && uncle->_col == RED)//uncle存在且为红--变色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续向上调整cur = grandfather;parent = cur->_parent;}else//uncle不存在或者存在且为黑--旋转+变色{if (cur == parent->_right)//左单旋{RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else//右左双旋{// g// u p // cRotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return make_pair(newnode, true);}iterator Find(const K& key){//...return end();}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL){subRL->_parent = parent;}Node*parentParent = parent->_parent;parent->_parent = subR;subR->_left = parent;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subR;}else{parentParent->_right = subR;}subR->_parent = parentParent;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* parentParent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subL;}else{parentParent->_right = subL;}subL->_parent = parentParent;}}bool IsBalance()//红黑树的验证{//检查根节点if (_root == nullptr)return true;if (_root->_col == RED)return false;//检查是否有连续的红节点+每条路径的黑色节点数目是否一样int refVal = 0;//参考值Node* cur = _root;while (cur)//以最左边的路径上的黑色节点数目为参考值{if (cur->_col == BLACK)refVal++;cur = cur->_left;}int blacknum = 0;return Check(_root, refVal, blacknum);}bool Check(Node* root, const int refVal,int blacknum){if (root == nullptr){if (blacknum != refVal){cout << "存在黑色节点数量不相等的路径" << endl;return false;}return true;}if (root->_col == BLACK)//节点为黑色--统计{blacknum++;}if(root->_col == RED && root->_parent->_col == RED)//节点为红色--检查{cout << "有连续的红色节点" << endl;return false;}return Check(root->_left, refVal, blacknum)&& Check(root->_right, refVal, blacknum);}int Height(){return _Height(_root);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}size_t Size(){return _Size(_root);}size_t _Size(Node* root){if (root == nullptr)return 0;return _Size(root->_left) + _Size(root->_right) + 1;}
private:Node* _root = nullptr;
};处理设计红黑树Insert函数返回值的细节: