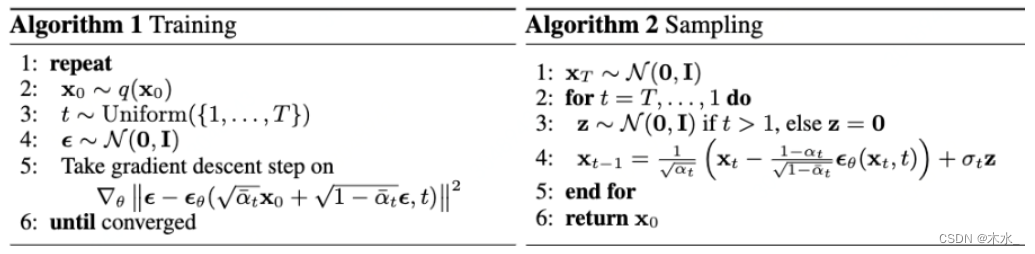
1. 训练和采样流程
2. 无条件实现
import torch, time, os
import numpy as np
import torch.nn as nn
import torch.optim as optim
from torchvision.datasets import MNIST
from torchvision import transforms
from torch.utils.data import DataLoader
from torchvision.utils import save_image
import torch.nn.functional as Fclass ResidualConvBlock(nn.Module):def __init__(self, in_channels: int, out_channels: int, is_res: bool = False) -> None:super().__init__()'''standard ResNet style convolutional block'''self.same_channels = in_channels==out_channelsself.is_res = is_resself.conv1 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 3, 1, 1),nn.BatchNorm2d(out_channels),nn.GELU(),)self.conv2 = nn.Sequential(nn.Conv2d(out_channels, out_channels, 3, 1, 1),nn.BatchNorm2d(out_channels),nn.GELU(),)def forward(self, x: torch.Tensor) -> torch.Tensor:if self.is_res:x1 = self.conv1(x)x2 = self.conv2(x1)# this adds on correct residual in case channels have increasedif self.same_channels:out = x + x2else:out = x1 + x2return out / 1.414else:x1 = self.conv1(x)x2 = self.conv2(x1)return x2class UnetDown(nn.Module):def __init__(self, in_channels, out_channels):super(UnetDown, self).__init__()'''process and downscale the image feature maps'''layers = [ResidualConvBlock(in_channels, out_channels), nn.MaxPool2d(2)]self.model = nn.Sequential(*layers)def forward(self, x):return self.model(x)class UnetUp(nn.Module):def __init__(self, in_channels, out_channels):super(UnetUp, self).__init__()'''process and upscale the image feature maps'''layers = [nn.ConvTranspose2d(in_channels, out_channels, 2, 2),ResidualConvBlock(out_channels, out_channels),ResidualConvBlock(out_channels, out_channels),]self.model = nn.Sequential(*layers)def forward(self, x, skip):x = torch.cat((x, skip), 1)x = self.model(x)return xclass EmbedFC(nn.Module):def __init__(self, input_dim, emb_dim):super(EmbedFC, self).__init__()'''generic one layer FC NN for embedding things '''self.input_dim = input_dimlayers = [nn.Linear(input_dim, emb_dim),nn.GELU(),nn.Linear(emb_dim, emb_dim),]self.model = nn.Sequential(*layers)def forward(self, x):x = x.view(-1, self.input_dim)return self.model(x)
class Unet(nn.Module):def __init__(self, in_channels, n_feat=256):super(Unet, self).__init__()self.in_channels = in_channelsself.n_feat = n_featself.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)self.down1 = UnetDown(n_feat, n_feat)self.down2 = UnetDown(n_feat, 2 * n_feat)self.to_vec = nn.Sequential(nn.AvgPool2d(7), nn.GELU())self.timeembed1 = EmbedFC(1, 2 * n_feat)self.timeembed2 = EmbedFC(1, 1 * n_feat)self.up0 = nn.Sequential(# nn.ConvTranspose2d(6 * n_feat, 2 * n_feat, 7, 7), # when concat temb and cemb end up w 6*n_featnn.ConvTranspose2d(2 * n_feat, 2 * n_feat, 7, 7), # otherwise just have 2*n_featnn.GroupNorm(8, 2 * n_feat),nn.ReLU(),)self.up1 = UnetUp(4 * n_feat, n_feat)self.up2 = UnetUp(2 * n_feat, n_feat)self.out = nn.Sequential(nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1),nn.GroupNorm(8, n_feat),nn.ReLU(),nn.Conv2d(n_feat, self.in_channels, 3, 1, 1),)def forward(self, x, t):'''输入加噪图像和对应的时间step,预测反向噪声的正态分布:param x: 加噪图像:param t: 对应step:return: 正态分布噪声'''x = self.init_conv(x)down1 = self.down1(x)down2 = self.down2(down1)hiddenvec = self.to_vec(down2)# embed time steptemb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)# 将上采样输出与step编码相加,输入到下一个上采样层up1 = self.up0(hiddenvec)up2 = self.up1(up1 + temb1, down2)up3 = self.up2(up2 + temb2, down1)out = self.out(torch.cat((up3, x), 1))return outclass DDPM(nn.Module):def __init__(self, model, betas, n_T, device):super(DDPM, self).__init__()self.model = model.to(device)# register_buffer 可以提前保存alpha相关,节约时间for k, v in self.ddpm_schedules(betas[0], betas[1], n_T).items():self.register_buffer(k, v)self.n_T = n_Tself.device = deviceself.loss_mse = nn.MSELoss()def ddpm_schedules(self, beta1, beta2, T):'''提前计算各个step的alpha,这里beta是线性变化:param beta1: beta的下限:param beta2: beta的下限:param T: 总共的step数'''assert beta1 < beta2 < 1.0, "beta1 and beta2 must be in (0, 1)"beta_t = (beta2 - beta1) * torch.arange(0, T + 1, dtype=torch.float32) / T + beta1 # 生成beta1-beta2均匀分布的数组sqrt_beta_t = torch.sqrt(beta_t)alpha_t = 1 - beta_tlog_alpha_t = torch.log(alpha_t)alphabar_t = torch.cumsum(log_alpha_t, dim=0).exp() # alpha累乘sqrtab = torch.sqrt(alphabar_t) # 根号alpha累乘oneover_sqrta = 1 / torch.sqrt(alpha_t) # 1 / 根号alphasqrtmab = torch.sqrt(1 - alphabar_t) # 根号下(1-alpha累乘)mab_over_sqrtmab_inv = (1 - alpha_t) / sqrtmabreturn {"alpha_t": alpha_t, # \alpha_t"oneover_sqrta": oneover_sqrta, # 1/\sqrt{\alpha_t}"sqrt_beta_t": sqrt_beta_t, # \sqrt{\beta_t}"alphabar_t": alphabar_t, # \bar{\alpha_t}"sqrtab": sqrtab, # \sqrt{\bar{\alpha_t}} # 加噪标准差"sqrtmab": sqrtmab, # \sqrt{1-\bar{\alpha_t}} # 加噪均值"mab_over_sqrtmab": mab_over_sqrtmab_inv, # (1-\alpha_t)/\sqrt{1-\bar{\alpha_t}}}def forward(self, x):"""训练过程中, 随机选择step和生成噪声"""# 随机选择step_ts = torch.randint(1, self.n_T + 1, (x.shape[0],)).to(self.device) # t ~ Uniform(0, n_T)# 随机生成正态分布噪声noise = torch.randn_like(x) # eps ~ N(0, 1)# 加噪后的图像x_tx_t = (self.sqrtab[_ts, None, None, None] * x+ self.sqrtmab[_ts, None, None, None] * noise)# 将unet预测的对应step的正态分布噪声与真实噪声做对比return self.loss_mse(noise, self.model(x_t, _ts / self.n_T))def sample(self, n_sample, size, device):# 随机生成初始噪声图片 x_T ~ N(0, 1)x_i = torch.randn(n_sample, *size).to(device)for i in range(self.n_T, 0, -1):t_is = torch.tensor([i / self.n_T]).to(device)t_is = t_is.repeat(n_sample, 1, 1, 1)z = torch.randn(n_sample, *size).to(device) if i > 1 else 0eps = self.model(x_i, t_is)x_i = x_i[:n_sample]x_i = self.oneover_sqrta[i] * (x_i - eps * self.mab_over_sqrtmab[i]) + self.sqrt_beta_t[i] * zreturn x_iclass ImageGenerator(object):def __init__(self):'''初始化,定义超参数、数据集、网络结构等'''self.epoch = 20self.sample_num = 100self.batch_size = 256self.lr = 0.0001self.n_T = 400self.device = 'cuda' if torch.cuda.is_available() else 'cpu'self.init_dataloader()self.sampler = DDPM(model=Unet(in_channels=1), betas=(1e-4, 0.02), n_T=self.n_T, device=self.device).to(self.device)self.optimizer = optim.Adam(self.sampler.model.parameters(), lr=self.lr)def init_dataloader(self):'''初始化数据集和dataloader'''tf = transforms.Compose([transforms.ToTensor(),])train_dataset = MNIST('./data/',train=True,download=True,transform=tf)self.train_dataloader = DataLoader(train_dataset, batch_size=self.batch_size, shuffle=True, drop_last=True)val_dataset = MNIST('./data/',train=False,download=True,transform=tf)self.val_dataloader = DataLoader(val_dataset, batch_size=self.batch_size, shuffle=False)def train(self):self.sampler.train()print('训练开始!!')for epoch in range(self.epoch):self.sampler.model.train()loss_mean = 0for i, (images, labels) in enumerate(self.train_dataloader):images, labels = images.to(self.device), labels.to(self.device)# 将latent和condition拼接后输入网络loss = self.sampler(images)loss_mean += loss.item()self.optimizer.zero_grad()loss.backward()self.optimizer.step()train_loss = loss_mean / len(self.train_dataloader)print('epoch:{}, loss:{:.4f}'.format(epoch, train_loss))self.visualize_results(epoch)@torch.no_grad()def visualize_results(self, epoch):self.sampler.eval()# 保存结果路径output_path = 'results/Diffusion'if not os.path.exists(output_path):os.makedirs(output_path)tot_num_samples = self.sample_numimage_frame_dim = int(np.floor(np.sqrt(tot_num_samples)))out = self.sampler.sample(tot_num_samples, (1, 28, 28), self.device)save_image(out, os.path.join(output_path, '{}.jpg'.format(epoch)), nrow=image_frame_dim)if __name__ == '__main__':generator = ImageGenerator()generator.train()
3. 有条件实现
import torch, time, os
import numpy as np
import torch.nn as nn
import torch.optim as optim
from torchvision.datasets import MNIST
from torchvision import transforms
from torch.utils.data import DataLoader
from torchvision.utils import save_image
import torch.nn.functional as Fclass ResidualConvBlock(nn.Module):def __init__(self, in_channels: int, out_channels: int, is_res: bool = False) -> None:super().__init__()'''standard ResNet style convolutional block'''self.same_channels = in_channels==out_channelsself.is_res = is_resself.conv1 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 3, 1, 1),nn.BatchNorm2d(out_channels),nn.GELU(),)self.conv2 = nn.Sequential(nn.Conv2d(out_channels, out_channels, 3, 1, 1),nn.BatchNorm2d(out_channels),nn.GELU(),)def forward(self, x: torch.Tensor) -> torch.Tensor:if self.is_res:x1 = self.conv1(x)x2 = self.conv2(x1)# this adds on correct residual in case channels have increasedif self.same_channels:out = x + x2else:out = x1 + x2return out / 1.414else:x1 = self.conv1(x)x2 = self.conv2(x1)return x2class UnetDown(nn.Module):def __init__(self, in_channels, out_channels):super(UnetDown, self).__init__()'''process and downscale the image feature maps'''layers = [ResidualConvBlock(in_channels, out_channels), nn.MaxPool2d(2)]self.model = nn.Sequential(*layers)def forward(self, x):return self.model(x)class UnetUp(nn.Module):def __init__(self, in_channels, out_channels):super(UnetUp, self).__init__()'''process and upscale the image feature maps'''layers = [nn.ConvTranspose2d(in_channels, out_channels, 2, 2),ResidualConvBlock(out_channels, out_channels),ResidualConvBlock(out_channels, out_channels),]self.model = nn.Sequential(*layers)def forward(self, x, skip):x = torch.cat((x, skip), 1)x = self.model(x)return xclass EmbedFC(nn.Module):def __init__(self, input_dim, emb_dim):super(EmbedFC, self).__init__()'''generic one layer FC NN for embedding things '''self.input_dim = input_dimlayers = [nn.Linear(input_dim, emb_dim),nn.GELU(),nn.Linear(emb_dim, emb_dim),]self.model = nn.Sequential(*layers)def forward(self, x):x = x.view(-1, self.input_dim)return self.model(x)
class Unet(nn.Module):def __init__(self, in_channels, n_feat=256, n_classes=10):super(Unet, self).__init__()self.in_channels = in_channelsself.n_feat = n_featself.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)self.down1 = UnetDown(n_feat, n_feat)self.down2 = UnetDown(n_feat, 2 * n_feat)self.to_vec = nn.Sequential(nn.AvgPool2d(7), nn.GELU())self.timeembed1 = EmbedFC(1, 2 * n_feat)self.timeembed2 = EmbedFC(1, 1 * n_feat)self.conditionembed1 = EmbedFC(n_classes, 2 * n_feat)self.conditionembed2 = EmbedFC(n_classes, 1 * n_feat)self.up0 = nn.Sequential(# nn.ConvTranspose2d(6 * n_feat, 2 * n_feat, 7, 7), # when concat temb and cemb end up w 6*n_featnn.ConvTranspose2d(2 * n_feat, 2 * n_feat, 7, 7), # otherwise just have 2*n_featnn.GroupNorm(8, 2 * n_feat),nn.ReLU(),)self.up1 = UnetUp(4 * n_feat, n_feat)self.up2 = UnetUp(2 * n_feat, n_feat)self.out = nn.Sequential(nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1),nn.GroupNorm(8, n_feat),nn.ReLU(),nn.Conv2d(n_feat, self.in_channels, 3, 1, 1),)def forward(self, x, c, t):'''输入加噪图像和对应的时间step,预测反向噪声的正态分布:param x: 加噪图像:param c: contition向量:param t: 对应step:return: 正态分布噪声'''x = self.init_conv(x)down1 = self.down1(x)down2 = self.down2(down1)hiddenvec = self.to_vec(down2)# embed time steptemb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)cemb1 = self.conditionembed1(c).view(-1, self.n_feat * 2, 1, 1)cemb2 = self.conditionembed2(c).view(-1, self.n_feat, 1, 1)# 将上采样输出与step编码相加,输入到下一个上采样层up1 = self.up0(hiddenvec)up2 = self.up1(cemb1 * up1 + temb1, down2)up3 = self.up2(cemb2 * up2 + temb2, down1)out = self.out(torch.cat((up3, x), 1))return outclass DDPM(nn.Module):def __init__(self, model, betas, n_T, device):super(DDPM, self).__init__()self.model = model.to(device)# register_buffer 可以提前保存alpha相关,节约时间for k, v in self.ddpm_schedules(betas[0], betas[1], n_T).items():self.register_buffer(k, v)self.n_T = n_Tself.device = deviceself.loss_mse = nn.MSELoss()def ddpm_schedules(self, beta1, beta2, T):'''提前计算各个step的alpha,这里beta是线性变化:param beta1: beta的下限:param beta2: beta的下限:param T: 总共的step数'''assert beta1 < beta2 < 1.0, "beta1 and beta2 must be in (0, 1)"beta_t = (beta2 - beta1) * torch.arange(0, T + 1, dtype=torch.float32) / T + beta1 # 生成beta1-beta2均匀分布的数组sqrt_beta_t = torch.sqrt(beta_t)alpha_t = 1 - beta_tlog_alpha_t = torch.log(alpha_t)alphabar_t = torch.cumsum(log_alpha_t, dim=0).exp() # alpha累乘sqrtab = torch.sqrt(alphabar_t) # 根号alpha累乘oneover_sqrta = 1 / torch.sqrt(alpha_t) # 1 / 根号alphasqrtmab = torch.sqrt(1 - alphabar_t) # 根号下(1-alpha累乘)mab_over_sqrtmab_inv = (1 - alpha_t) / sqrtmabreturn {"alpha_t": alpha_t, # \alpha_t"oneover_sqrta": oneover_sqrta, # 1/\sqrt{\alpha_t}"sqrt_beta_t": sqrt_beta_t, # \sqrt{\beta_t}"alphabar_t": alphabar_t, # \bar{\alpha_t}"sqrtab": sqrtab, # \sqrt{\bar{\alpha_t}} # 加噪标准差"sqrtmab": sqrtmab, # \sqrt{1-\bar{\alpha_t}} # 加噪均值"mab_over_sqrtmab": mab_over_sqrtmab_inv, # (1-\alpha_t)/\sqrt{1-\bar{\alpha_t}}}def forward(self, x, c):"""训练过程中, 随机选择step和生成噪声"""# 随机选择step_ts = torch.randint(1, self.n_T + 1, (x.shape[0],)).to(self.device) # t ~ Uniform(0, n_T)# 随机生成正态分布噪声noise = torch.randn_like(x) # eps ~ N(0, 1)# 加噪后的图像x_tx_t = (self.sqrtab[_ts, None, None, None] * x+ self.sqrtmab[_ts, None, None, None] * noise)# 将unet预测的对应step的正态分布噪声与真实噪声做对比return self.loss_mse(noise, self.model(x_t, c, _ts / self.n_T))def sample(self, n_sample, c, size, device):# 随机生成初始噪声图片 x_T ~ N(0, 1)x_i = torch.randn(n_sample, *size).to(device)for i in range(self.n_T, 0, -1):t_is = torch.tensor([i / self.n_T]).to(device)t_is = t_is.repeat(n_sample, 1, 1, 1)z = torch.randn(n_sample, *size).to(device) if i > 1 else 0eps = self.model(x_i, c, t_is)x_i = x_i[:n_sample]x_i = self.oneover_sqrta[i] * (x_i - eps * self.mab_over_sqrtmab[i]) + self.sqrt_beta_t[i] * zreturn x_iclass ImageGenerator(object):def __init__(self):'''初始化,定义超参数、数据集、网络结构等'''self.epoch = 20self.sample_num = 100self.batch_size = 256self.lr = 0.0001self.n_T = 400self.device = 'cuda' if torch.cuda.is_available() else 'cpu'self.init_dataloader()self.sampler = DDPM(model=Unet(in_channels=1), betas=(1e-4, 0.02), n_T=self.n_T, device=self.device).to(self.device)self.optimizer = optim.Adam(self.sampler.model.parameters(), lr=self.lr)def init_dataloader(self):'''初始化数据集和dataloader'''tf = transforms.Compose([transforms.ToTensor(),])train_dataset = MNIST('./data/',train=True,download=True,transform=tf)self.train_dataloader = DataLoader(train_dataset, batch_size=self.batch_size, shuffle=True, drop_last=True)val_dataset = MNIST('./data/',train=False,download=True,transform=tf)self.val_dataloader = DataLoader(val_dataset, batch_size=self.batch_size, shuffle=False)def train(self):self.sampler.train()print('训练开始!!')for epoch in range(self.epoch):self.sampler.model.train()loss_mean = 0for i, (images, labels) in enumerate(self.train_dataloader):images, labels = images.to(self.device), labels.to(self.device)labels = F.one_hot(labels, num_classes=10).float()# 将latent和condition拼接后输入网络loss = self.sampler(images, labels)loss_mean += loss.item()self.optimizer.zero_grad()loss.backward()self.optimizer.step()train_loss = loss_mean / len(self.train_dataloader)print('epoch:{}, loss:{:.4f}'.format(epoch, train_loss))self.visualize_results(epoch)@torch.no_grad()def visualize_results(self, epoch):self.sampler.eval()# 保存结果路径output_path = 'results/Diffusion'if not os.path.exists(output_path):os.makedirs(output_path)tot_num_samples = self.sample_numimage_frame_dim = int(np.floor(np.sqrt(tot_num_samples)))labels = F.one_hot(torch.Tensor(np.repeat(np.arange(10), 10)).to(torch.int64), num_classes=10).to(self.device).float()out = self.sampler.sample(tot_num_samples, labels, (1, 28, 28), self.device)save_image(out, os.path.join(output_path, '{}.jpg'.format(epoch)), nrow=image_frame_dim)if __name__ == '__main__':generator = ImageGenerator()generator.train()


![[晓理紫]每日论文分享(有中文摘要,源码或项目地址)--大模型、扩散模型、视觉语言导航](https://img-blog.csdnimg.cn/direct/d600446621fb4abca94426f575e8ab36.png#pic_center)