简介
排序(Sorting):将一个数据元素(或记录)的任意序列,重新排列成一个按关键字有序的序列
排序算法分为内部排序和外部排序
内部排序:在排序期间数据对象全部存放在内存的排序
外部排序:在排序期间全部对象个数太多,不能同时存放在内存,必须根据排序过程的要求,不断在内、外存之间移动的排序
排序方法的稳定性:
如果在记录序列中有两个记录r[i]和r[j], 它们的关键字key[i]==key[j]且在排序之前, 记录r[i]排在r[j]前面。
如果在排序之后, 记录r[i]仍在记录r[j]的前面, 则称这个排序方法是稳定的, 否则称这个排序方法是不稳定的
排序常用的数据结构是数组、顺序表、结构体
排序算法的应用非常广泛,商业领域、生活领域、科研领域都几乎离不开排序
淘宝商品价格排序(海量数据排序)
微博热搜排行榜(点击量动态排序)
QQ好友列表(字符排序)
数列相似度(将数列元素排序后对比)
元素唯一性(排序后找出重复项)
凸包问题(例如图像识别手势,采点绘制轮廓)
排序介绍
排序包含两种基本操作
比较:比较两个关键字的大小
移动:将记录从一个位置移动至另一个位置
排序算法的时间复杂度,用算法执行中的记录关键字比较次数与记录移动次数来衡量
根据排序思想来划分,内部排序算法分为五类
插入排序:直接插入排序、希尔排序
交换排序:冒泡排序、快速排序
选择排序:简单选择排序、堆排序
归并排序:两路归并排序
基数排序:k进制位数排序
判断排序好坏的方法
算法的时间复杂度、空间复杂度
算法的稳定性
排序算法的最好情况(比较和移动次数最少)
排序算法的最坏情况(比较和移动次数最多)
初始待排序序列是否会影响排序算法性能
排序次数是否固定
每一趟排序能否确定一个元素的最终排序位置
插入排序
插入排序的思想:假设前k-1个记录已经排序,第k个元素找到合适位置插入。分为
直接插入排序
希尔排序
直接插入排序
1. 直接插入排序是最简单的排序方法,操作:
每步将一个待排序的对象,按其关键字大小,插入到前面已经排好序的有序表的适当位置上, 直到对象全部插入为止
2. 直接插入排序的算法步骤:
当插入第i(i≥1)个对象时, 前面的r[0], r[1], …, r[i-1]已经排好序。
用r[i]的关键字与r[i-1], r[i-2], …的关键字顺序进行比较(和顺序查找类似),如果小于,则将r[x]向后移动(插入位置后的记录向后顺移)
找到插入位置即将r[i]插入
3. 直接插入排序的算法分析
直接插入排序的时间复杂度为O(n2),空间复杂度O(1)
直接插入排序是一种稳定的排序方法
直接插入排序最大的优点是简单,在记录数较少时,是比较好的办法
4.其他
算法性能与关键字的初始排列有关,成正比关系。初始排列越有序,比较和移动次数越少
最好情况,排序前已经有序,总比较次数n-1,移动次数0
最坏情况,排序前是逆序,每趟排序都要比较i-1次和移动i-1次,总比较次数n2/2,总移动次数n2/2
每趟排序不能确定一个元素的最终排序位置,例如最后一个元素是最小值插入到第一个元素位置,导致前n-1个元素都要后移
//直插排序
/*
因为直接插入排序过程中,前i-1个元素是有序的,所以可以改进为折半插入排序
折半插入排序是指在查找记录插入位置时,采用折半查找算法,折半查找比顺序查找快,所以折半插入排序在查找上性能比直接插入排序好
由于需要移动的记录数目与直接插入排序相同(为O(n2)),所以折半插入排序的时间复杂度为O(n2)
*/
void insert(int *a)
{for(int i=1;i<l;i++){int tmp=a[i];int j=i;while(j>0){if(a[j-1]<tmp)break;a[j]=a[j-1];j--;}a[j]=tmp;}
}
希尔排序
1.希尔排序的思想:先将待排序列分成若干子序列;对其分别进行插入排序;待整个序列基本有序时,再对全体记录进行一次直接插入排序,希尔排序(Shell Sort)又称为缩小增量排序
2. 希尔排序的算法设计
首先取一个整数 gap < n(待排序记录数) 作为间隔, 将全部记录分为 gap 个子序列, 所有距离为 gap 的记录放在同一个子序列中
在每一个子序列中分别施行直接插入排序。
然后缩小间隔 gap, 例如取 gap = gap/2
重复上述的子序列划分和排序工作,直到最后取gap = 1, 将所有记录放在同一个序列中排序为止。
3. 排序举例
4. 希尔排序的算法分析
开始时,gap的值较大,子序列中的记录较少,排序速度较快
随着排序进展,gap值逐渐变小,子序列中记录个数逐渐变多,由于前面大多数记录已基本有序, 所以排序速度仍然很快。
gap的取法有多种,一般取法:gap=n/2,gap=gap/2,直到gap = 1
代码实现
//希尔排序
/*
希尔排序的算法分析
希尔排序所需的比较次数和移动次数约为n1.3
当n趋于无穷时可减少到n×(log2n)2
希尔排序的时间复杂度约为O(n(log2n)2)
希尔排序是一种不稳定的排序方法
*/
void Xier(int *a)
{int gap = l / 2;while (gap >=1) {for (int i = 0; i <l-gap; i++) {for (int j = i; j < l; j += gap) {if (a[i] > a[j ])swap(a[i], a[j]);}}gap /= 2;show(a);}
}
交换排序
交换排序的思想:比较序列中前后两个位置的元素,如果符合前小后大或前大后小,则继续比较;如果不符合则交换两个位置的元素,再继续比较。
交换排序的算法有:起泡排序 快速排序
起泡排序
1. 起泡排序,又称冒泡排序,算法思想:
设待排序记录序列中的记录个数为n
一般地,第i趟排序从1到n-i+1
依次比较相邻两个记录的关键字,如果发生逆序,则交换之
其结果是这n-i+1个记录中,关键字最大的记录被交换到第n-i+1的位置上,最多作n-1趟。
2. 冒泡排序的算法过程
i=1,为第一趟排序,关键字最大的记录将被交换到最后一个位置
i=2,为第二趟排序,关键字次大的记录将被交换到最后第二个位置
依此类推……
关键字小的记录不断上浮(起泡),关键字大的记录不断下沉(每趟排序最大的一直沉到底)
3.冒泡排序举例
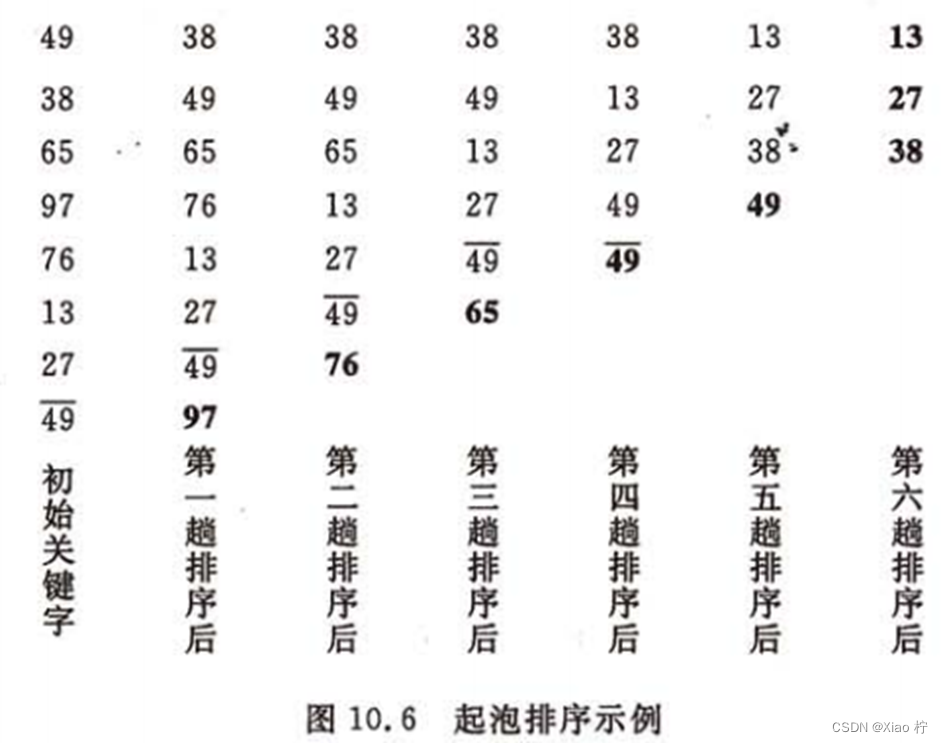
4. 冒泡排序的算法分析
起泡排序的时间复杂度为O(n2),空间复杂度O(1)
起泡排序是一种稳定的排序方法
5. 冒泡排序的其他分析
算法性能与关键字的初始排列有关,成正比关系。初始排列越有序,比较和移动次数越少
最好情况,排序前已经有序,只执行一趟,总比较次数n-1,移动次数0
最坏情况,排序前是逆序,每趟排序都要比较i-1次和移动i-1次,总比较次数n2/2,总移动次数n2/2
冒泡排序能够提前结束,最好情况下只要一趟比较就结束。
每趟排序能够确定一个元素的最终排序位置,因为每一趟排序会把最大或最小元素排到末尾,不再参与排序
代码实现
//冒泡排序
void maopao(int *a)
{for (int i = 0; i <l; i++) {for (int j = 0; j < l - i-1; j++) {if (a[j] >= a[j + 1]) {swap(a[j], a[j + 1]);}}}
}
快速排序
1.快速排序算法设计:
任取待排序记录序列中的某个记录(例如取第一个记录)作为基准(枢),按照该记录的关键字大小,将整个记录序列划分为左右两个子序列:
左侧子序列中所有记录的关键字都小于或等于基准记录的关键字
右侧子序列中所有记录的关键字都大于基准记录的关键字
基准记录则排在这两个子序列中间(这也是该记录最终应安放的位置)
然后分别对这两个子序列重复施行上述方法,直到所有的记录都排在相应位置上为止。
基准记录也称为枢轴(或支点)记录。
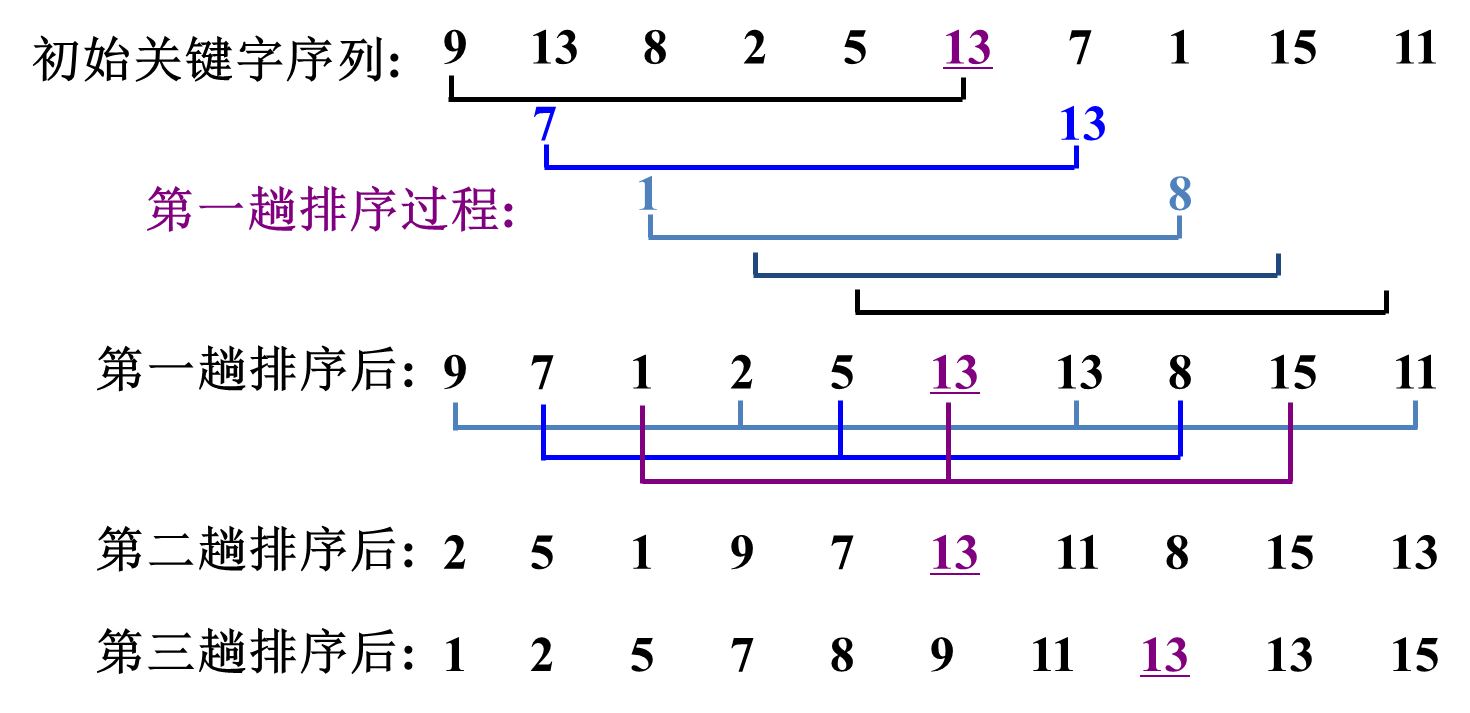
2. 快速排序算法过程
取序列第一个记录为枢轴记录,其关键字为Pivotkey
指针low指向序列第一个记录位置
指针high指向序列最后一个记录位置
一趟排序(某个子序列)过程
①.从high指向的记录开始,向前找到第一个关键字的值小于Pivotkey的记录,将其放到low指向的位置,low+1
②.从low指向的记录开始,向后找到第一个关键字的值大于Pivotkey的记录,将其放到high指向的位置,high-1
③.重复1,2,直到low=high,将枢轴记录放在low(high)指向的位置
对枢轴记录前后两个子序列执行相同的操作,直到每个子序列都只有一个记录为止
3. 快速排序的算法分析
快速排序是一个递归过程, 其递归树如图所示,利用序列第一个记录作为基准,将整个序列划分为左右两个子序列。只要是关键字小于基准记录关键字的记录都移到序列左侧
可证明快速排序的平均计算时间是O(nlog2n)
实验结果表明: 就平均计算时间而言, 快速排序是所有内排序方法中最好的一个
但快速排序是一种不稳定的排序方法
代码实现
//快速排序
int getpiot(int *a, int l, int r) {int tmp = a[l];while (l < r) {while (l < r && a[r] >= tmp)r--;swap(a[r], a[l]);while (l < r && a[l] <= tmp)l++;swap(a[l], a[r]);}return l;
}
void quick_sort(int *a,int l,int r)
{if(l>=r)return;int p= getpiot(a,l,r);show(a);quick_sort(a,l,p-1);quick_sort(a,p+1,r);
}
选择排序
选择排序的思想,每一趟选出第i小(大)的元素,与第i个位置的元素交换
选择排序算法包括
简单选择排序
堆排序
简单选择排序
1.简单选择排序的算法设计:
每一趟(例如第i趟,i=1,2,…,n-1)在后面 n-i+1个待排序记录中通过n-i次比较,选出关键字最小的记录,与第i个记录交换
2.简单选择排序的算法分析
时间复杂度O(n2)
是一种不稳定的排序方法
3.其他
简单选择排序的其他分析
简单选择排序性能与记录的初始排列无关。无论是否有序,都要每趟全部扫描找出第i小(大)的元素,第i趟选择的比较次数总是 n-i次
每趟排序能够确定一个元素的最终排序位置,因为每一趟排序后,第i小(大)的元素放在第i个位置
当不需要全部排序,只需要排序出前k个元素,用简单选择排序是一种好的算法。
代码实现
//简单选择排序
void choose(int *a)
{for(int i=0;i<l-1;i++) {int mini = i;for (int j = i + 1; j < l; j++) {if (a[j] < a[mini]) {mini = j;}}if (mini != i)swap(a[i], a[mini]);}
}
堆排序
1. 堆排序算法流程
将初始序列从1至n按顺序创建一个完全二叉树
将完全二叉树调整为堆
最后结点与根结点交换
排除掉最后结点,重复步骤2,直到剩下一个结点
2. 堆排序的算法分析
对长度为n的序列,排序最多需要做n-1次调整建新堆(筛选)。建初始堆时,需要n/2次筛选,因此共需要O(n×k)量级的时间
k=log2n,堆排序时间复杂度为O(nlog2n)
堆排序是一个不稳定的排序方法
代码实现
void HeapAdjust(int* arr, int start, int end)
{int tmp = arr[start];for (int i = 2 * start + 1; i <= end; i = i * 2 + 1){if (i < end&& arr[i] < arr[i + 1])//有右孩子并且左孩子小于右孩子{i++;}//i一定是左右孩子的最大值if (arr[i] > tmp){arr[start] = arr[i];start = i;}else{break;}}arr[start] = tmp;
}
void HeapSort(int* arr)
{//第一次建立大根堆,从后往前依次调整for(int i=(l-1-1)/2;i>=0;i--){HeapAdjust(arr, i, l - 1);}show(arr);//每次将根和待排序的最后一次交换,然后在调整int tmp;for (int i = 0; i < l- 1; i++){tmp = arr[0];arr[0] = arr[l - 1-i];arr[l - 1 - i] = tmp;HeapAdjust(arr, 0, l - 1-i- 1);show(arr);}
}
归并排序
1. 归并排序的思想:将两个或两个以上的有序表合并成一个新的有序表。
两个有序顺序表合并为新的有序表时,借助多一倍空间,使得记录无需移动,直接插入新空间中。
两路归并:将初始序列分成前后两组,通过比较归并到目标序列中
2. 2路归并排序算法设计:
将n个记录看成是n个有序序列
将前后相邻的两个有序序列归并为一个有序序列(两路归并)
重复做两路归并操作,直到只有一个有序序列为止
3. 2路归并排序算法举例
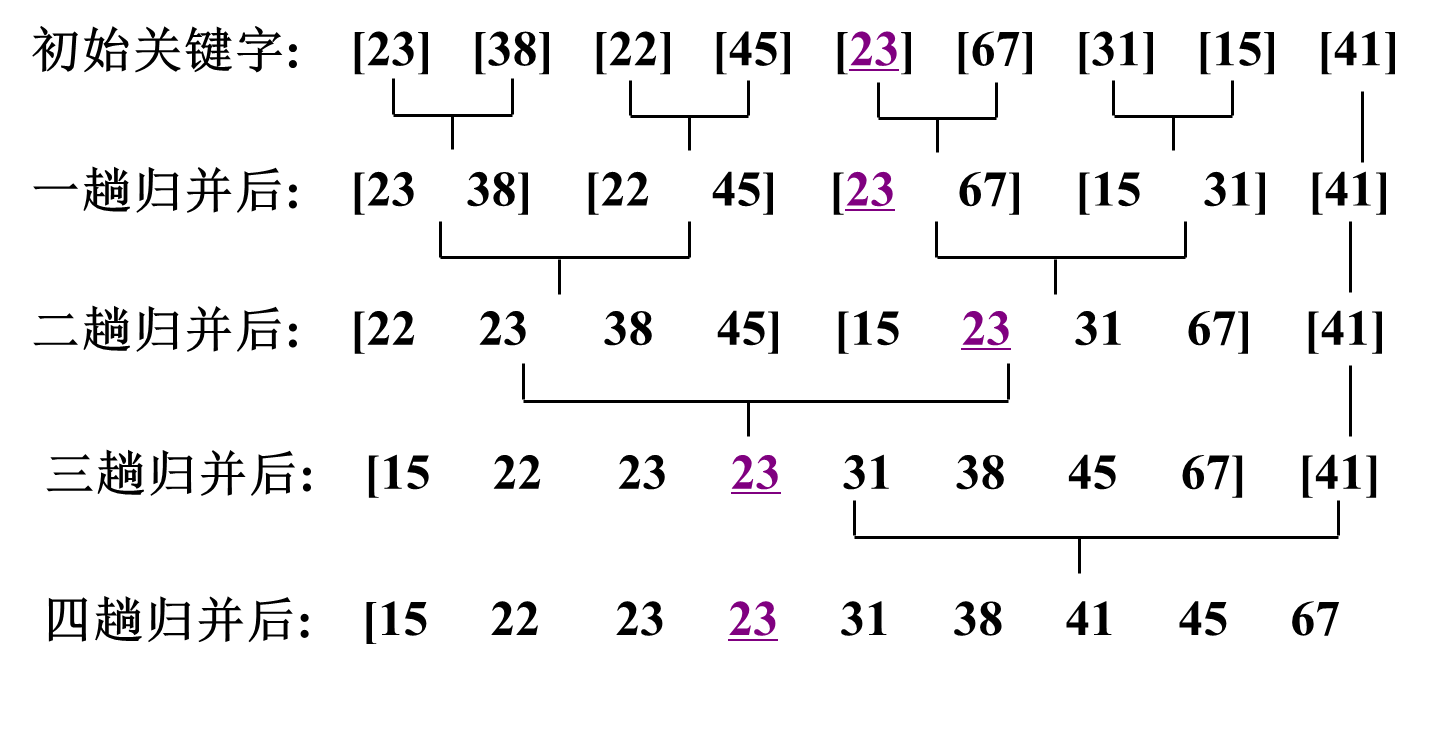
4. 2路归并排序算法分析:
如果待排序的记录为n个,则需要做log2n趟两路归并排序,每趟两路归并排序的时间复杂度为O(n)
2路归并排序的时间复杂度为O(nlog2n)
归并排序的空间复杂度是O(n)
归并排序是一种稳定的排序方法
5. 其他
归并排序优点:时间复杂度为O(nlog2n)且是稳定的排序方法
缺点需要额外空间,归并排序的空间复杂度是O(n)
归并排序性能与记录的初始排列无关。无论是否有序,每趟都要逐个两子序列相互合并,一定要log2n趟
每趟排序不能够确定一个元素的最终排序位置,因为如果最后一个子序列包含最小元素,在最后一趟排序时要插入到最前位置,导致所有元素都要移动
6. 代码实现
可选择递归或非递归实现
//归并排序
void merge(string *a,string *b,int start,int mid,int left)
{int i=start,k=start,j=mid+1;while(i!=mid+1&&j!=left+1){if(a[i]>=a[j])b[k++]=a[i++];elseb[k++]=a[j++];}while(i!=mid+1)b[k++]=a[i++];while(j!=left+1)b[k++]=a[j++];for(i=start;i<=left;i++)a[i]=b[i];
}void merge_sort(string *a,string *b,int start,int end) //递归实现归并排序
{if(start<end){int mid=start+(end-start)/2;merge_sort(a,b,start,mid);merge_sort(a,b,mid+1, end);merge(a,b,start,mid,end);}
}void merge_sort(string *a,string *b) //非递归实现归并排序
{int right,left,mid;for(int i=1;i<l;i=2*i){for(left=0;left<l-1;left+=2*i){mid=left+i-1;if(mid>=l-1)break;right=left+2*i-1;if(right>=l)right=l-1;merge(a,b,left,mid,right);}}
}
基数排序
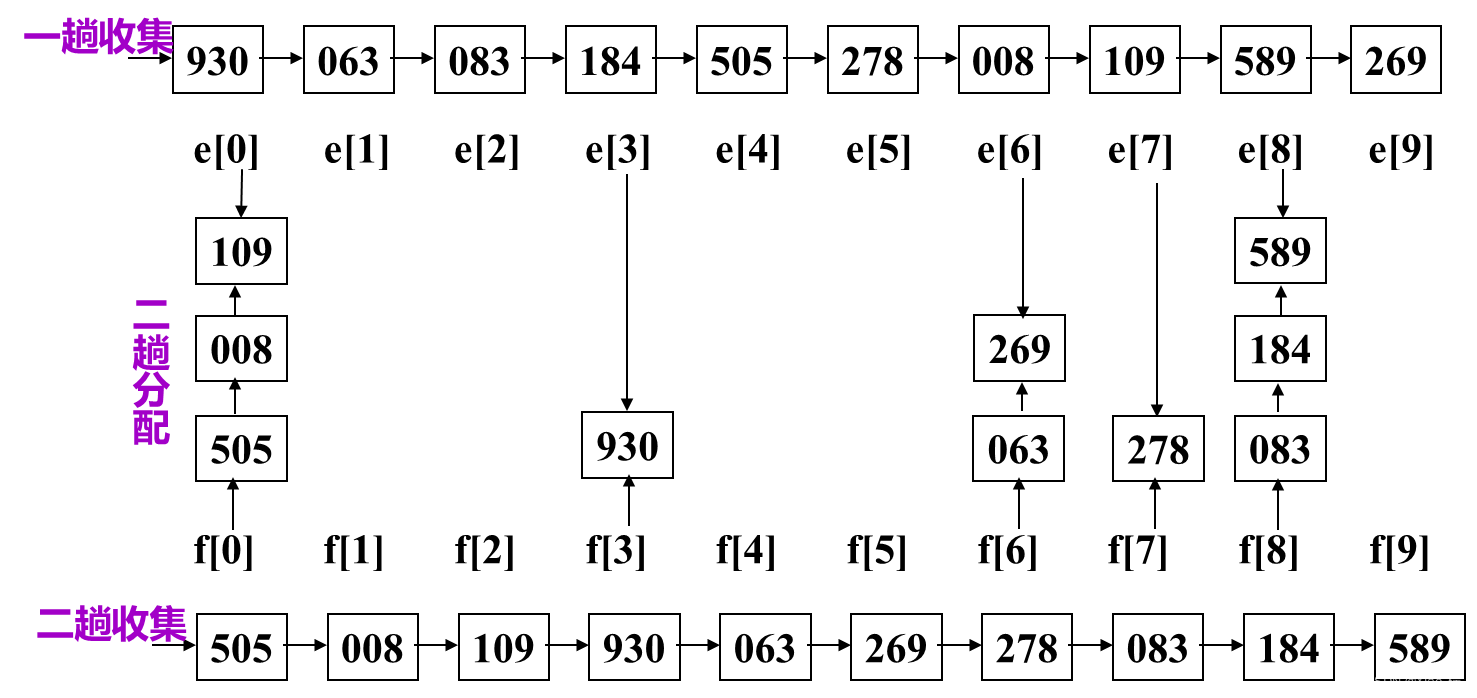
1. 基数排序:通过“分配”和“收集”若干次操作,对单逻辑关键字进行排序的一种方法。
2. 链式基数排序的算法设计:
基于最低位优先法思想
用链表作存储结构的基数排序
以十进制为例
①.设置10个队列,f[i]和e[i]分别为第i个队列的头指针和尾指针
②.第i趟分配:根据第i位关键字的值,改变记录的指针,将链表中记录按次序分配至10个链队列中(采用队尾插入法);每个队列中记录关键字的第i位关键字相同
③.第i趟收集:改变所有非空队列的队尾记录的指针域,令其指向下一个非空队列的队头记录,重新将10个队列链成一个链表

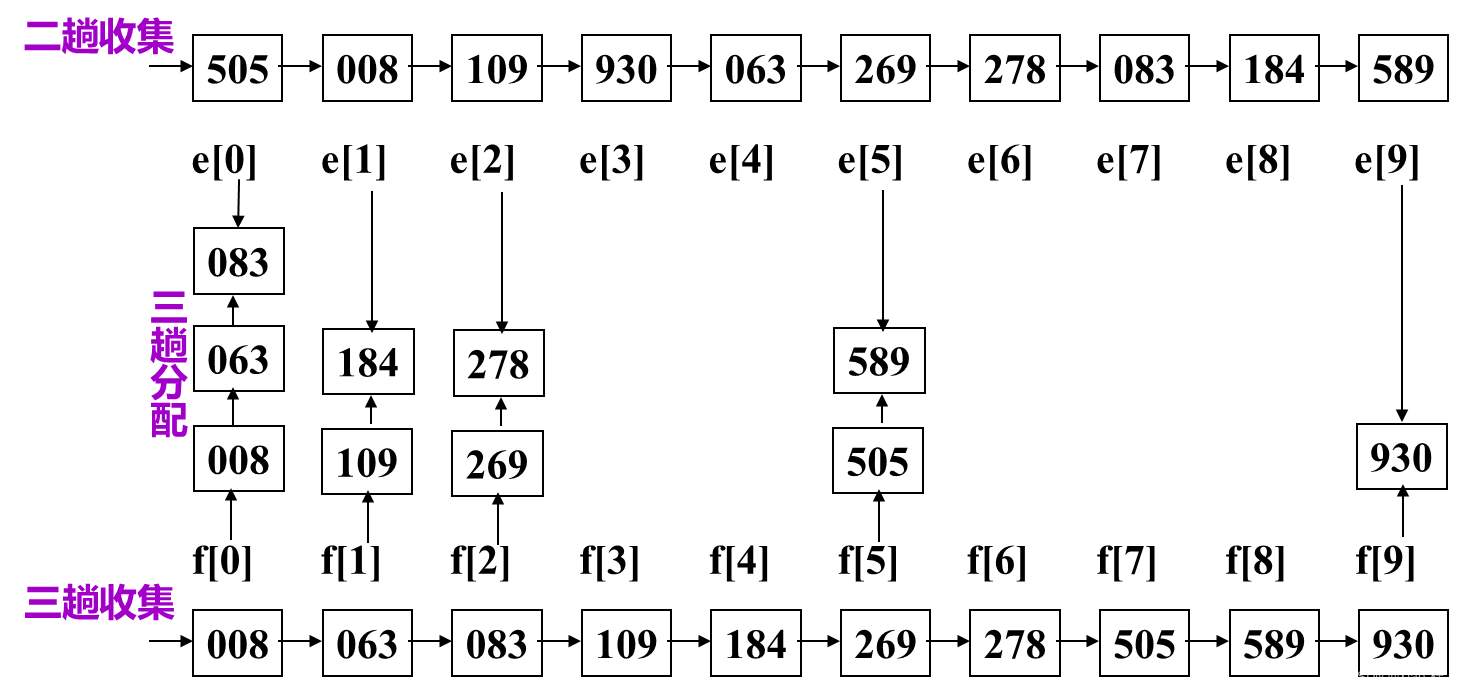
3. 链式基数排序的算法分析
若每个关键字有 d 位,关键字的基数为radix
需要重复执行d 趟“分配”与“收集”
每趟对 n 个对象进行“分配”,对radix个队列进行“收集”
时间复杂度为O(d(n+radix))
一般情况下radix表示k进制,是一个很小的值
所以时间复杂度为O(dn),其中n是记录总数,d是关键字长度d位
是一种稳定的排序方法
4. 代码实现
// 基数排序的搜索函数
int radixSearch(vector<int>& arr, int target) {// 找到数组中的最大值int maxVal = *max_element(arr.begin(), arr.end());// 对每个位数进行基数排序for (int exp = 1; maxVal / exp > 0; exp *= 10) {vector<int> count(10, 0); // 10个数字的计数数组// 统计每个数字的出现次数for (int i = 0; i < arr.size(); i++) {count[(arr[i] / exp) % 10]++;}// 计算累计出现次数for (int i = 1; i < 10; i++) {count[i] += count[i - 1];}// 构建排序后的数组std::vector<int> sortedArr(arr.size());for (int i = arr.size() - 1; i >= 0; i--) {sortedArr[count[(arr[i] / exp) % 10] - 1] = arr[i];count[(arr[i] / exp) % 10]--;}// 更新原始数组arr = sortedArr;}// 在排序后的数组中进行二分查找int left = 0;int right = arr.size() - 1;while (left <= right) {int mid = left + (right - left) / 2;if (arr[mid] == target) {return mid;} else if (arr[mid] < target) {left = mid + 1;} else {right = mid - 1;}}// 如果未找到目标值,返回-1return -1;
}
内部排序算法比较
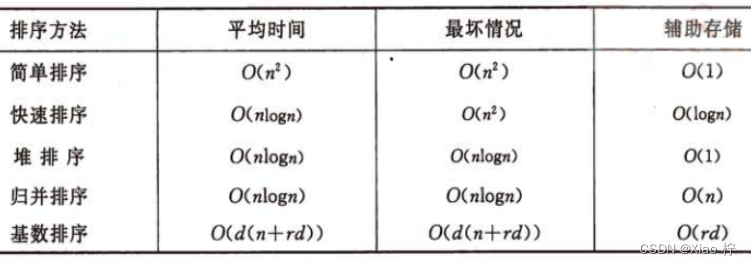 快速排序、堆排序、归并排序三者比较, 简单排序包含除希尔排序外的其他时间复杂度O(n2)的多种排序,简单排序都是稳定的,在初始基本有序或n较小时,优先选择直接插入排序,它可以和快排、归并结合使用
快速排序、堆排序、归并排序三者比较, 简单排序包含除希尔排序外的其他时间复杂度O(n2)的多种排序,简单排序都是稳定的,在初始基本有序或n较小时,优先选择直接插入排序,它可以和快排、归并结合使用
基数排序适用于多关键字排序,在n很大且d较小的情况,使用链式基数排序较好
从稳定性来看,归并排序+简单排序+基数排序都是稳定的,根据实际需要选择
总结
1. 排序:内部排序(在内存中进行)、外部排序(需要使用外存)
算法复杂度包括比较次数KCN和移动次数RMN,稳定性的概念
2. 排序分类:插入排序、交换排序、选择排序、归并排序、基数排序
3. 插入排序:假定前i-1个对象有序,第i个数据找出合适位置插入
直接插入排序,时间复杂度为O(n2),是稳定排序
希尔排序,时间复杂度为O(n x(log2 n)2),是不稳定的排序方法
4. 交换排序:两个位置元素不符合排序规则,就交换两个元素
起泡排序,时间复杂度为O(n2),是一种稳定排序方法。起泡排序可以提前结束。
快速排序,时间复杂度为O(nlog2n),是一种不稳定排序方法
5. 选择排序,每一趟选出第i小(大)的元素,与第i个位置的元素交换
简单选择排序,时间复杂度为O(n2),是一种不稳定排序方法
堆排序,时间复杂度为O(nlog2n),是一种不稳定排序方法
要掌握堆判断
6. 归并排序,将两个或两个以上的有序表合并成一个新的有序表。
两路归并排序,时间复杂度为O(nlog2n),是不稳定排序,空间复杂度O(n)
7. 基数排序,多关键字排序,最低位优先法LSD
链式基数排序,时间复杂度为O(dn),是稳定排序