依旧是带着问题再去学习
首先,Android是怎么启动的?
Android服务是怎么启动的?
Android线程是怎么切换的?
Android ApplicationThread是怎么创建的?
那么接下来开始分析Android的启动流程 还是一步一图
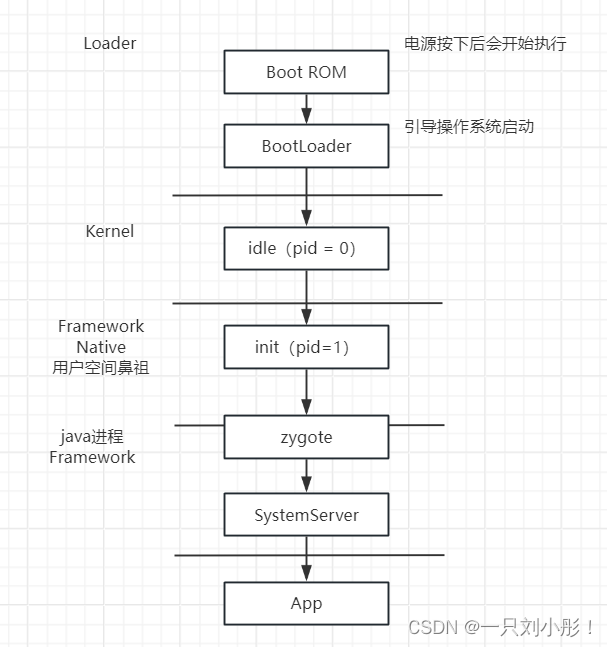
先画一张流程图描述个大概
这里有个小知识点,线程和进程在Linux内核空间是一样的,只是因为共享内存,所以才有线程和进程区分,连调用方法都一样,只是传进去的参数线程会传入的是父进程的用户空间
言归正传,继续看Android的启动流程
首先 init进程如何启动的?
init 是在 system/bin/init 这个文件来启动的,那么这个文件是在哪执行的呢?

是这一层进行执行的 是一个叫 kenel_init 的方法,启动init进程
1497static int __ref kernel_init(void *unused)
1498{
1499 int ret;
1500
1501 /*
1502 * Wait until kthreadd is all set-up.
1503 */
1504 wait_for_completion(&kthreadd_done);
1505
1506 kernel_init_freeable();
1507 /* need to finish all async __init code before freeing the memory */
1508 async_synchronize_full();
1509 kprobe_free_init_mem();
1510 ftrace_free_init_mem();
1511 kgdb_free_init_mem();
1512 exit_boot_config();
1513 free_initmem();
1514 mark_readonly();
1515
1516 /*
1517 * Kernel mappings are now finalized - update the userspace page-table
1518 * to finalize PTI.
1519 */
1520 pti_finalize();
1521
1522 system_state = SYSTEM_RUNNING;
1523 numa_default_policy();
1524
1525 rcu_end_inkernel_boot();
1526
1527 do_sysctl_args();
1528
1529 if (ramdisk_execute_command) {
1530 ret = run_init_process(ramdisk_execute_command);
1531 if (!ret)
1532 return 0;
1533 pr_err("Failed to execute %s (error %d)\n",
1534 ramdisk_execute_command, ret);
1535 }
1536
1537 /*
1538 * We try each of these until one succeeds.
1539 *
1540 * The Bourne shell can be used instead of init if we are
1541 * trying to recover a really broken machine.
1542 */
1543 if (execute_command) {
1544 ret = run_init_process(execute_command);
1545 if (!ret)
1546 return 0;
1547 panic("Requested init %s failed (error %d).",
1548 execute_command, ret);
1549 }
1550
1551 if (CONFIG_DEFAULT_INIT[0] != '\0') {
1552 ret = run_init_process(CONFIG_DEFAULT_INIT);
1553 if (ret)
1554 pr_err("Default init %s failed (error %d)\n",
1555 CONFIG_DEFAULT_INIT, ret);
1556 else
1557 return 0;
1558 }
1559
1560 if (!try_to_run_init_process("/sbin/init") ||
1561 !try_to_run_init_process("/etc/init") ||这个地方会启动Android的,init进程
1562 !try_to_run_init_process("/bin/init") ||
1563 !try_to_run_init_process("/bin/sh"))
1564 return 0;
1565
1566 panic("No working init found. Try passing init= option to kernel. "
1567 "See Linux Documentation/admin-guide/init.rst for guidance.");
1568}那么这个 try to run init process 是什么呢?
1424static int run_init_process(const char *init_filename)
1425{
1426 const char *const *p;
1427
1428 argv_init[0] = init_filename;
1429 pr_info("Run %s as init process\n", init_filename);
1430 pr_debug(" with arguments:\n");
1431 for (p = argv_init; *p; p++)
1432 pr_debug(" %s\n", *p);
1433 pr_debug(" with environment:\n");
1434 for (p = envp_init; *p; p++)
1435 pr_debug(" %s\n", *p);
1436 return kernel_execve(init_filename, argv_init, envp_init);
1437}
1438
1439static int try_to_run_init_process(const char *init_filename)
1440{
1441 int ret;
1442
1443 ret = run_init_process(init_filename);
1444
1445 if (ret && ret != -ENOENT) {
1446 pr_err("Starting init: %s exists but couldn't execute it (error %d)\n",
1447 init_filename, ret);
1448 }
1449
1450 return ret;
1451}最终调用到 kernel_execve
那么这个init文件是谁生成的?调用init会调用到哪里?
实际上init文件是 Android.bp生成,最终调用到 main.cpp上
cc_binary {
//省略srcs: ["main.cpp"]}时序图如下

main.cpp是Android系统的头文件,那么接下来我们接着看main.cpp

51 int main(int argc, char** argv) {
52 #if __has_feature(address_sanitizer)
53 __asan_set_error_report_callback(AsanReportCallback);
54 #endif
55
56 if (!strcmp(basename(argv[0]), "ueventd")) {
57 return ueventd_main(argc, argv);
58 }
59
60 if (argc > 1) {
61 if (!strcmp(argv[1], "subcontext")) {
62 android::base::InitLogging(argv, &android::base::KernelLogger);
63 const BuiltinFunctionMap& function_map = GetBuiltinFunctionMap();
64
65 return SubcontextMain(argc, argv, &function_map);
66 }
67
68 if (!strcmp(argv[1], "selinux_setup")) {
69 return SetupSelinux(argv);
70 }
71
72 if (!strcmp(argv[1], "second_stage")) {
73 return SecondStageMain(argc, argv);
74 }
75 }
76
77 return FirstStageMain(argc, argv);
78 }这是main.cpp的main函数,这个main方法会执行多次,Android系统最初的函数 先看 First
int FirstStageMain(int argc, char** argv) {
175 if (REBOOT_BOOTLOADER_ON_PANIC) {检查,如果init挂掉了会重新启动
176 InstallRebootSignalHandlers();
177 }
178
179 boot_clock::time_point start_time = boot_clock::now();
180
181 std::vector<std::pair<std::string, int>> errors;
182 #define CHECKCALL(x) \
183 if ((x) != 0) errors.emplace_back(#x " failed", errno);
184
185 // Clear the umask.
186 umask(0);
187
188 CHECKCALL(clearenv());
189 CHECKCALL(setenv("PATH", _PATH_DEFPATH, 1));
190 // Get the basic filesystem setup we need put together in the initramdisk
191 // on / and then we'll let the rc file figure out the rest.挂载 创建一些文件
192 CHECKCALL(mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755"));
193 CHECKCALL(mkdir("/dev/pts", 0755));
194 CHECKCALL(mkdir("/dev/socket", 0755));
195 省略
332 CHECKCALL(mknod("/dev/null", S_IFCHR | 0666, makedev(1, 3)));输入输出SetStdioToDevNull(argv);以及启动 selinuxupconst char* args[] = {path, "selinux_setup", nullptr};execv(path, const_cast<char**>(args));
333 return 1;
334 }First 主要作用是挂载,初始化重要文件,重定向输入输出,log,以及启动 selinux_setup
execv函数会再走一次这个main函数
然后再次进入,启动 Second

SetupSelinux 是一个最小权限原则
672 int SetupSelinux(char** argv) {
673 SetStdioToDevNull(argv);
674 InitKernelLogging(argv);697 省略
698 const char* path = "/system/bin/init";打开 second_stage
699 const char* args[] = {path, "second_stage", nullptr};
700 execv(path, const_cast<char**>(args));
701
702 // execv() only returns if an error happened, in which case we
703 // panic and never return from this function.
704 PLOG(FATAL) << "execv(\"" << path << "\") failed";
705
706 return 1;
707 }selinux_setup 是一个安全策略 然后进入SecondStageMain
if (!strcmp(argv[1], "second_stage")) {
73 return SecondStageMain(argc, argv);
74 } int SecondStageMain(int argc, char** argv) {省略初始化一些属性域PropertyInit();处理子进程终止信号,僵尸进程InstallSignalFdHandler(&epoll);InstallInitNotifier(&epoll);StartPropertyService(&property_fd);匹配命令和函数之间的关系const BuiltinFunctionMap& function_map = GetBuiltinFunctionMap();解析init.rcLoadBootScripts(am, sm);}然后看下如何解析init.rc这个工作吧
272 static void LoadBootScripts(ActionManager& action_manager, ServiceList& service_list) { 创建解析器
273 std::string bootscript = GetProperty("ro.boot.init_rc", "");
276 if (bootscript.empty()) {解析init.rc
277 parser.ParseConfig("/system/etc/init/hw/init.rc");
278 if (!parser.ParseConfig("/system/etc/init")) {
279 late_import_paths.emplace_back("/system/etc/init");
280 }
281 // late_import is available only in Q and earlier release. As we don't
282 // have system_ext in those versions, skip late_import for system_ext.
283 parser.ParseConfig("/system_ext/etc/init");
284 if (!parser.ParseConfig("/product/etc/init")) {
285 late_import_paths.emplace_back("/product/etc/init");
286 }
287 if (!parser.ParseConfig("/odm/etc/init")) {
288 late_import_paths.emplace_back("/odm/etc/init");
289 }
290 if (!parser.ParseConfig("/vendor/etc/init")) {
291 late_import_paths.emplace_back("/vendor/etc/init");
292 }
293 } else {
294 parser.ParseConfig(bootscript);
296 }
297 先看下这个CreateParser方法 创建三种解析器,对rc语法进行解析
251 Parser CreateParser(ActionManager& action_manager, ServiceList& service_list) {
252 Parser parser;
253
254 parser.AddSectionParser("service", std::make_unique<ServiceParser>(
255 &service_list, GetSubcontext(), std::nullopt));
256 parser.AddSectionParser("on", std::make_unique<ActionParser>(&action_manager, GetSubcontext()));
257 parser.AddSectionParser("import", std::make_unique<ImportParser>(&parser));
258
259 return parser;
260 }解析出二进制文件这个地方省略,有兴趣可以后面研究
解析出init.rc后会进入一个while循环 还是这个 SecondStageMain 方法,接下来进入while循环当中
操作系统到最终还是一个死循环
int SecondStageMain(int argc, char** argv) {842 进入while
843 while (true) {
844 // By default, sleep until something happens.
845 auto epoll_timeout = std::optional<std::chrono::milliseconds>{};
846
847 auto shutdown_command = shutdown_state.CheckShutdown();
848 if (shutdown_command) {
849 HandlePowerctlMessage(*shutdown_command);
850 }
851
852 if (!(prop_waiter_state.MightBeWaiting() || Service::is_exec_service_running())) {
853 am.ExecuteOneCommand();
854 }
855 if (!IsShuttingDown()) {
856 auto next_process_action_time = HandleProcessActions();
857
858 // If there's a process that needs restarting, wake up in time for that.
859 if (next_process_action_time) {
860 epoll_timeout = std::chrono::ceil<std::chrono::milliseconds>(
861 *next_process_action_time - boot_clock::now());
862 if (*epoll_timeout < 0ms) epoll_timeout = 0ms;
863 }
864 }
865
866 if (!(prop_waiter_state.MightBeWaiting() || Service::is_exec_service_running())) {
867 // If there's more work to do, wake up again immediately.
868 if (am.HasMoreCommands()) epoll_timeout = 0ms;
869 }
870 这里有个Wait 会在这里循环等待
871 auto pending_functions = epoll.Wait(epoll_timeout);
872 if (!pending_functions.ok()) {
873 LOG(ERROR) << pending_functions.error();
874 } else if (!pending_functions->empty()) {
875 // We always reap children before responding to the other pending functions. This is to
876 // prevent a race where other daemons see that a service has exited and ask init to
877 // start it again via ctl.start before init has reaped it.
878 ReapAnyOutstandingChildren();
879 for (const auto& function : *pending_functions) {
880 (*function)();
881 }
882 }
883 if (!IsShuttingDown()) {
884 HandleControlMessages();
885 SetUsbController();
886 }
887 }
888
889 return 0;
890 }一张时序图,接下来会进入init.rc当中
init处理几个重要事情
1.挂载文件
2.设置selinux 安全策略
3.设置属性服务 注册到epoll中
4.解析init.rc
5.循环处理脚本
6.循环等待
画张时序图

接下来继续分析,init.rc 就会启动zygote zygto 是第一个进入到java层,从zygto 开始才会开启java层
import /init.environ.rc
8 import /system/etc/init/hw/init.usb.rc
9 import /init.${ro.hardware}.rc
10 import /vendor/etc/init/hw/init.${ro.hardware}.rc
11 import /system/etc/init/hw/init.usb.configfs.rc
12 import /system/etc/init/hw/init.${ro.zygote}.rc
13
14 # Cgroups are mounted right before early-init using list from /etc/cgroups.json
15 on early-init
16 # Disable sysrq from keyboard
17 write /proc/sys/kernel/sysrq 0
18
19 # Android doesn't need kernel module autoloading, and it causes SELinux
20 # denials. So disable it by setting modprobe to the empty string. Note: to
21 # explicitly set a sysctl to an empty string, a trailing newline is needed.
22 write /proc/sys/kernel/modprobe \n省略# Now we can start zygote for devices with file based encryption
443 trigger zygote-start当执行到这的时候就会启动 zygote
812 on zygote-start && property:ro.crypto.state=unencrypted
813 # A/B update verifier that marks a successful boot.
814 exec_start update_verifier_nonencrypted
815 start statsd
816 start netd
817 start zygote
818 start zygote_secondary可以看到init.rc导入了这个 zygote的文件
然后实际上启动的是 init.zygote.32.rc / init.zygote.64.rc 文件
具体启动哪个,是要分系统32/64 位系统
主要作用是启动 zygote的main方法,还有 如果被关闭会重启
接下来启动app_main.cpp 的main方法,现在仍然是main方法
Android的运行环境就是zygto启动的
172
173 int main(int argc, char* const argv[])
174 {
175 if (!LOG_NDEBUG) {
176 String8 argv_String;
177 for (int i = 0; i < argc; ++i) {
178 argv_String.append("\"");
179 argv_String.append(argv[i]);
180 argv_String.append("\" ");
181 }
182 ALOGV("app_process main with argv: %s", argv_String.string());
183 }
184 Android 时运行环境
185 AppRuntime runtime(argv[0], computeArgBlockSize(argc, argv));
186 // Process command line arguments
187 // ignore argv[0]
188 argc--;
189 argv++;
190
216 const char* spaced_commands[] = { "-cp", "-classpath" };
218 bool known_command = false;
219
220 int i;解析一堆东西,不详细看了
221 for (i = 0; i < argc; i++) {
222 if (known_command == true) {
223 runtime.addOption(strdup(argv[i]));
227 ALOGV("app_process main add known option '%s'", argv[i]);
228 known_command = false;
229 continue;
230 }
231
232 for (int j = 0;
233 j < static_cast<int>(sizeof(spaced_commands) / sizeof(spaced_commands[0]));
234 ++j) {
235 if (strcmp(argv[i], spaced_commands[j]) == 0) {
236 known_command = true;
237 ALOGV("app_process main found known command '%s'", argv[i]);
238 }
239 }
240
241 if (argv[i][0] != '-') {
242 break;
243 }
244 if (argv[i][1] == '-' && argv[i][2] == 0) {
245 ++i; // Skip --.
246 break;
247 }
248
249 runtime.addOption(strdup(argv[i]));
250 // The static analyzer gets upset that we don't ever free the above
251 // string. Since the allocation is from main, leaking it doesn't seem
252 // problematic. NOLINTNEXTLINE
253 ALOGV("app_process main add option '%s'", argv[i]);
254 }
255
256 // Parse runtime arguments. Stop at first unrecognized option.
257 bool zygote = false;
258 bool startSystemServer = false;
259 bool application = false;
260 String8 niceName;
261 String8 className;
262
263 ++i; // Skip unused "parent dir" argument.
264 while (i < argc) {
265 const char* arg = argv[i++];如果是 zygote
266 if (strcmp(arg, "--zygote") == 0) {
267 zygote = true;
268 niceName = ZYGOTE_NICE_NAME;如果是 system-server
269 } else if (strcmp(arg, "--start-system-server") == 0) {
270 startSystemServer = true;
271 } else if (strcmp(arg, "--application") == 0) {
272 application = true;
273 } else if (strncmp(arg, "--nice-name=", 12) == 0) {
274 niceName.setTo(arg + 12);
275 } else if (strncmp(arg, "--", 2) != 0) {
276 className.setTo(arg);
277 break;
278 } else {
279 --i;
280 break;
281 }
282 }
283
284 Vector<String8> args;
285 if (!className.isEmpty()) {
292 runtime.setClassNameAndArgs(className, argc - i, argv + i);
293
294 if (!LOG_NDEBUG) {
295 String8 restOfArgs;
296 char* const* argv_new = argv + i;
297 int argc_new = argc - i;
298 for (int k = 0; k < argc_new; ++k) {
299 restOfArgs.append("\"");
300 restOfArgs.append(argv_new[k]);
301 restOfArgs.append("\" ");
302 }
303 ALOGV("Class name = %s, args = %s", className.string(), restOfArgs.string());
304 }
305 } else {
306 // We're in zygote mode.
307 maybeCreateDalvikCache();
308
309 if (startSystemServer) {
310 args.add(String8("start-system-server"));
311 }
312
313 char prop[PROP_VALUE_MAX];
314 if (property_get(ABI_LIST_PROPERTY, prop, NULL) == 0) {
315 LOG_ALWAYS_FATAL("app_process: Unable to determine ABI list from property %s.",
316 ABI_LIST_PROPERTY);
317 return 11;
318 }
319
320 String8 abiFlag("--abi-list=");
321 abiFlag.append(prop);
322 args.add(abiFlag);
323
324 // In zygote mode, pass all remaining arguments to the zygote
325 // main() method.
326 for (; i < argc; ++i) {
327 args.add(String8(argv[i]));
328 }
329 }
330
331 if (!niceName.isEmpty()) {
332 runtime.setArgv0(niceName.string(), true /* setProcName */);
333 }
334
335 if (zygote) {现在是zygote 走这里
336 runtime.start("com.android.internal.os.ZygoteInit", args, zygote);
337 } else if (className) {App走这
338 runtime.start("com.android.internal.os.RuntimeInit", args, zygote);
339 } else {
340 fprintf(stderr, "Error: no class name or --zygote supplied.\n");
341 app_usage();
342 LOG_ALWAYS_FATAL("app_process: no class name or --zygote supplied.");
343 }
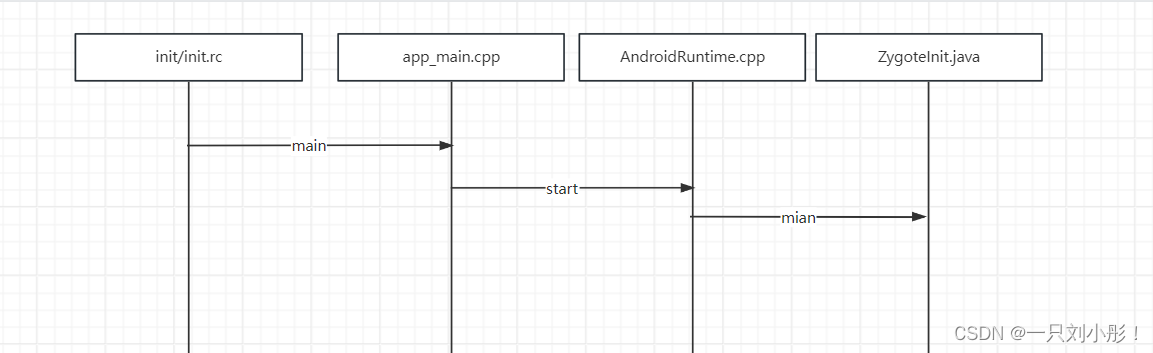
344 }最终会走到 AndroidRuntime 的start 这里有三件事
启动虚拟机
注册jni
启动ZygtoInit.java的main方法
1136 void AndroidRuntime::start(const char* className, const Vector<String8>& options, bool zygote)
1137 {
1138 ALOGD(">>>>>> START %s uid %d <<<<<<\n",
1139 className != NULL ? className : "(unknown)", getuid());
1140
1141 static const String8 startSystemServer("start-system-server");
1142 // Whether this is the primary zygote, meaning the zygote which will fork system server.
1143 bool primary_zygote = false;
1144
1145 /*
1146 * 'startSystemServer == true' means runtime is obsolete and not run from
1147 * init.rc anymore, so we print out the boot start event here.
1148 */
1149 for (size_t i = 0; i < options.size(); ++i) {
1150 if (options[i] == startSystemServer) {
1151 primary_zygote = true;
1152 /* track our progress through the boot sequence */
1153 const int LOG_BOOT_PROGRESS_START = 3000;
1154 LOG_EVENT_LONG(LOG_BOOT_PROGRESS_START, ns2ms(systemTime(SYSTEM_TIME_MONOTONIC)));
1155 }
1156 }
1157
1158 const char* rootDir = getenv("ANDROID_ROOT");
1159 if (rootDir == NULL) {
1160 rootDir = "/system";
1161 if (!hasDir("/system")) {
1162 LOG_FATAL("No root directory specified, and /system does not exist.");
1163 return;
1164 }
1165 setenv("ANDROID_ROOT", rootDir, 1);
1166 }
1167
1168 const char* artRootDir = getenv("ANDROID_ART_ROOT");
1169 if (artRootDir == NULL) {
1170 LOG_FATAL("No ART directory specified with ANDROID_ART_ROOT environment variable.");
1171 return;
1172 }
1173
1174 const char* i18nRootDir = getenv("ANDROID_I18N_ROOT");
1175 if (i18nRootDir == NULL) {
1176 LOG_FATAL("No runtime directory specified with ANDROID_I18N_ROOT environment variable.");
1177 return;
1178 }
1179
1180 const char* tzdataRootDir = getenv("ANDROID_TZDATA_ROOT");
1181 if (tzdataRootDir == NULL) {
1182 LOG_FATAL("No tz data directory specified with ANDROID_TZDATA_ROOT environment variable.");
1183 return;
1184 }
1185
1186 //const char* kernelHack = getenv("LD_ASSUME_KERNEL");
1187 //ALOGD("Found LD_ASSUME_KERNEL='%s'\n", kernelHack);
1188
1189 /* start the virtual machine */
1190 JniInvocation jni_invocation;
1191 jni_invocation.Init(NULL);
1192 JNIEnv* env;启动虚拟机
1193 if (startVm(&mJavaVM, &env, zygote, primary_zygote) != 0) {
1194 return;
1195 }
1196 onVmCreated(env);
1197
1198 /*
1199 * Register android functions.
1200 */启动注册JNI (与java层通信的方法)只加载一部分
1201 if (startReg(env) < 0) {
1202 ALOGE("Unable to register all android natives\n");
1203 return;
1204 }
1205
1206 /*
1207 * We want to call main() with a String array with arguments in it.
1208 * At present we have two arguments, the class name and an option string.
1209 * Create an array to hold them.
1210 */
1211 jclass stringClass;
1212 jobjectArray strArray;
1213 jstring classNameStr;
1214
1215 stringClass = env->FindClass("java/lang/String");
1216 assert(stringClass != NULL);
1217 strArray = env->NewObjectArray(options.size() + 1, stringClass, NULL);
1218 assert(strArray != NULL);
1219 classNameStr = env->NewStringUTF(className);
1220 assert(classNameStr != NULL);这里启动ZygoteInit.java文件
1221 env->SetObjectArrayElement(strArray, 0, classNameStr);
1222
1223 for (size_t i = 0; i < options.size(); ++i) {
1224 jstring optionsStr = env->NewStringUTF(options.itemAt(i).string());
1225 assert(optionsStr != NULL);
1226 env->SetObjectArrayElement(strArray, i + 1, optionsStr);
1227 }
1228
1229 /*
1230 * Start VM. This thread becomes the main thread of the VM, and will
1231 * not return until the VM exits.
1232 */
1233 char* slashClassName = toSlashClassName(className != NULL ? className : "");
1234 jclass startClass = env->FindClass(slashClassName);
1235 if (startClass == NULL) {
1236 ALOGE("JavaVM unable to locate class '%s'\n", slashClassName);
1237 /* keep going */
1238 } else {
1239 jmethodID startMeth = env->GetStaticMethodID(startClass, "main",
1240 "([Ljava/lang/String;)V");
1241 if (startMeth == NULL) {
1242 ALOGE("JavaVM unable to find main() in '%s'\n", className);
1243 /* keep going */
1244 } else {
1245 env->CallStaticVoidMethod(startClass, startMeth, strArray);
1246
1247 #if 0
1248 if (env->ExceptionCheck())
1249 threadExitUncaughtException(env);
1250 #endif
1251 }
1252 }
1253 free(slashClassName);
1254
1255 ALOGD("Shutting down VM\n");
1256 if (mJavaVM->DetachCurrentThread() != JNI_OK)
1257 ALOGW("Warning: unable to detach main thread\n");
1258 if (mJavaVM->DestroyJavaVM() != 0)
1259 ALOGW("Warning: VM did not shut down cleanly\n");
1260 }简单看下 setVM 一些大小的初始化
虚拟机到底是什么?其实就是一个内存管理
int AndroidRuntime::startVm(JavaVM** pJavaVM, JNIEnv** pEnv, bool zygote, bool primary_zygote)
610 {
611 JavaVMInitArgs initArgs;
612 char propBuf[PROPERTY_VALUE_MAX];
613 char jniOptsBuf[sizeof("-Xjniopts:")-1 + PROPERTY_VALUE_MAX];
614 char heapstartsizeOptsBuf[sizeof("-Xms")-1 + PROPERTY_VALUE_MAX];
615 char heapsizeOptsBuf[sizeof("-Xmx")-1 + PROPERTY_VALUE_MAX];省略,但是都是对虚拟机进行的初始化
670 char jdwpProviderBuf[sizeof("-XjdwpProvider:") - 1 + PROPERTY_VALUE_MAX];
671 char opaqueJniIds[sizeof("-Xopaque-jni-ids:") - 1 + PROPERTY_VALUE_MAX];
672 char bootImageBuf[sizeof("-Ximage:") - 1 + PROPERTY_VALUE_MAX];在看下注册jni这块
1592 /*static*/ int AndroidRuntime::startReg(JNIEnv* env)
1593 {
1594 ATRACE_NAME("RegisterAndroidNatives");1600 androidSetCreateThreadFunc((android_create_thread_fn) javaCreateThreadEtc);
1601
1602 ALOGV("--- registering native functions ---\n");1610 env->PushLocalFrame(200);
1611
1612 if (register_jni_procs(gRegJNI, NELEM(gRegJNI), env) < 0) {
1613 env->PopLocalFrame(NULL);
1614 return -1;
1615 }
1616 env->PopLocalFrame(NULL);
1617
1620 return 0;
1621 } static const RegJNIRec gRegJNI[] = {
1449 REG_JNI(register_com_android_internal_os_RuntimeInit),
1450 REG_JNI(register_com_android_internal_os_ZygoteInit_nativeZygoteInit),
1451 REG_JNI(register_android_os_SystemClock),
1452 REG_JNI(register_android_util_EventLog),
1453 REG_JNI(register_android_util_Log),
1454 REG_JNI(register_android_util_MemoryIntArray),
1455 REG_JNI(register_android_app_admin_SecurityLog),
1456 REG_JNI(register_android_content_AssetManager),
1457 REG_JNI(register_android_content_StringBlock),
1458 REG_JNI(register_android_content_XmlBlock),
1459 REG_JNI(register_android_content_res_ApkAssets),
1460 REG_JNI(register_android_text_AndroidCharacter),
1461 REG_JNI(register_android_text_Hyphenator),jni其实是一个函数指针,函数指针对应了java里的方法
这个是静态注册,我们搞个例子看下 jni 既可以native -> java 也可以 java-> native
250 int register_com_android_internal_os_RuntimeInit(JNIEnv* env)
251 {
252 const JNINativeMethod methods[] = {
253 {"nativeFinishInit", "()V",
254 (void*)com_android_internal_os_RuntimeInit_nativeFinishInit},
255 {"nativeSetExitWithoutCleanup", "(Z)V",
256 (void*)com_android_internal_os_RuntimeInit_nativeSetExitWithoutCleanup},
257 };
258 return jniRegisterNativeMethods(env, "com/android/internal/os/RuntimeInit",
259 methods, NELEM(methods));
260 }画一张时序图
接下来看下zygoteInit.java的main方法
public static void main(String[] argv) {ZygoteServer zygoteServer = null;// Mark zygote start. This ensures that thread creation will throw// an error.ZygoteHooks.startZygoteNoThreadCreation();// Zygote goes into its own process group.try {Os.setpgid(0, 0);} catch (ErrnoException ex) {throw new RuntimeException("Failed to setpgid(0,0)", ex);}Runnable caller;try {// Store now for StatsLogging later.final long startTime = SystemClock.elapsedRealtime();final boolean isRuntimeRestarted = "1".equals(SystemProperties.get("sys.boot_completed"));String bootTimeTag = Process.is64Bit() ? "Zygote64Timing" : "Zygote32Timing";TimingsTraceLog bootTimingsTraceLog = new TimingsTraceLog(bootTimeTag,Trace.TRACE_TAG_DALVIK);bootTimingsTraceLog.traceBegin("ZygoteInit");RuntimeInit.preForkInit();boolean startSystemServer = false;String zygoteSocketName = "zygote";String abiList = null;boolean enableLazyPreload = false;for (int i = 1; i < argv.length; i++) {if ("start-system-server".equals(argv[i])) {startSystemServer = true;} else if ("--enable-lazy-preload".equals(argv[i])) {enableLazyPreload = true;} else if (argv[i].startsWith(ABI_LIST_ARG)) {abiList = argv[i].substring(ABI_LIST_ARG.length());} else if (argv[i].startsWith(SOCKET_NAME_ARG)) {zygoteSocketName = argv[i].substring(SOCKET_NAME_ARG.length());} else {throw new RuntimeException("Unknown command line argument: " + argv[i]);}}final boolean isPrimaryZygote = zygoteSocketName.equals(Zygote.PRIMARY_SOCKET_NAME);if (!isRuntimeRestarted) {if (isPrimaryZygote) {FrameworkStatsLog.write(FrameworkStatsLog.BOOT_TIME_EVENT_ELAPSED_TIME_REPORTED,BOOT_TIME_EVENT_ELAPSED_TIME__EVENT__ZYGOTE_INIT_START,startTime);} else if (zygoteSocketName.equals(Zygote.SECONDARY_SOCKET_NAME)) {FrameworkStatsLog.write(FrameworkStatsLog.BOOT_TIME_EVENT_ELAPSED_TIME_REPORTED,BOOT_TIME_EVENT_ELAPSED_TIME__EVENT__SECONDARY_ZYGOTE_INIT_START,startTime);}}if (abiList == null) {throw new RuntimeException("No ABI list supplied.");}// In some configurations, we avoid preloading resources and classes eagerly.// In such cases, we will preload things prior to our first fork.if (!enableLazyPreload) {bootTimingsTraceLog.traceBegin("ZygotePreload");EventLog.writeEvent(LOG_BOOT_PROGRESS_PRELOAD_START,SystemClock.uptimeMillis());预加载资源,加速启动进程有一个preload_class preload(bootTimingsTraceLog);EventLog.writeEvent(LOG_BOOT_PROGRESS_PRELOAD_END,SystemClock.uptimeMillis());bootTimingsTraceLog.traceEnd(); // ZygotePreload}// Do an initial gc to clean up after startupbootTimingsTraceLog.traceBegin("PostZygoteInitGC");gcAndFinalize();bootTimingsTraceLog.traceEnd(); // PostZygoteInitGCbootTimingsTraceLog.traceEnd(); // ZygoteInitZygote.initNativeState(isPrimaryZygote);ZygoteHooks.stopZygoteNoThreadCreation();这个实际上就是socket如果AMS需要zygote 创建一个进程,就在这通信zygoteServer = new ZygoteServer(isPrimaryZygote);if (startSystemServer) {启动systemServerRunnable r = forkSystemServer(abiList, zygoteSocketName, zygoteServer);// {@code r == null} in the parent (zygote) process, and {@code r != null} in the// child (system_server) process.if (r != null) {r.run();return;}}Log.i(TAG, "Accepting command socket connections");// The select loop returns early in the child process after a fork and// loops forever in the zygote.启动一个循环,接收AMS的消息caller = zygoteServer.runSelectLoop(abiList);} catch (Throwable ex) {Log.e(TAG, "System zygote died with fatal exception", ex);throw ex;} finally {if (zygoteServer != null) {zygoteServer.closeServerSocket();}}// We're in the child process and have exited the select loop. Proceed to execute the// command.if (caller != null) {caller.run();}}现在知道AMS和zygote是靠socket通信,可是问题是为什么使用socket?
因为socket更安全,binder会有一个线程池,有死锁的风险,为什么有死锁风险?
这里有个题外话,为什么回调里不能加锁?当你在回调里加锁,如果回调里切了线程有锁,并且访问这把锁,下面代码又需要上一把锁就会死锁
binder这个死锁是另一个场景,如果你切换了进程,当前线程拿了一把锁,你在这里切进程,锁没人通知它解开就会一直锁住,也会死锁
AMS属于SystemServer里面,服务代码
还有一个小知识点,Loop之所以是主线程是因为main方法所在的线程被称为主线程
pid = Zygote.forkSystemServer(parsedArgs.mUid, parsedArgs.mGid,parsedArgs.mGids,parsedArgs.mRuntimeFlags,null,parsedArgs.mPermittedCapabilities,parsedArgs.mEffectiveCapabilities);} catch (IllegalArgumentException ex) {throw new RuntimeException(ex);}/* For child process */if (pid == 0) {if (hasSecondZygote(abiList)) {waitForSecondaryZygote(socketName);}zygoteServer.closeServerSocket();sytemServer在这里通过反射执行return handleSystemServerProcess(parsedArgs);}还是刚才的main方法,pid == 0 时候代表这段代码已经是SystemServer,所以这是一段 SystemServer专属方法
那么SystemServer fork是怎么执行的呢?
static jint com_android_internal_os_Zygote_nativeForkSystemServer(
2075 JNIEnv* env, jclass, uid_t uid, gid_t gid, jintArray gids,
2076 jint runtime_flags, jobjectArray rlimits, jlong permitted_capabilities,
2077 jlong effective_capabilities) {
2078 std::vector<int> fds_to_close(MakeUsapPipeReadFDVector()),
2079 fds_to_ignore(fds_to_close);
2080
2081 fds_to_close.push_back(gUsapPoolSocketFD);
2082
2083 if (gUsapPoolEventFD != -1) {
2084 fds_to_close.push_back(gUsapPoolEventFD);
2085 fds_to_ignore.push_back(gUsapPoolEventFD);
2086 }
2087
2088 if (gSystemServerSocketFd != -1) {
2089 fds_to_close.push_back(gSystemServerSocketFd);
2090 fds_to_ignore.push_back(gSystemServerSocketFd);
2091 }
2092
2093 pid_t pid = ForkCommon(env, true,
2094 fds_to_close,
2095 fds_to_ignore,
2096 true);static pid_t ForkCommon(JNIEnv* env, bool is_system_server,
1076 const std::vector<int>& fds_to_close,
1077 const std::vector<int>& fds_to_ignore,
1078 bool is_priority_fork) {
1091
1114
1115 pid_t pid = fork();关于fork函数需要结合linux的知识,这个后面专门做一期了解,把它和android系统关联起来
![Jenkins手把手图文教程[基于Jenkins 2.164.1]](https://img-blog.csdnimg.cn/img_convert/0f633c51ba730f5d28df269a1c43180b.png)