ubuntu22.04@laptop OpenCV Get Started: 007_color_spaces
- 1. 源由
- 2. 颜色空间
- 2.1 RGB颜色空间
- 2.2 LAB颜色空间
- 2.3 YCrCb颜色空间
- 2.4 HSV颜色空间
- 3 代码工程结构
- 3.1 C++应用Demo
- 3.2 Python应用Demo
- 4. 重点分析
- 4.1 interactive_color_detect
- 4.2 interactive_color_segment
- 4.3 data_analysis
- 4.3.1 黄色
- 4.3.2 红色
- 4.3.3 蓝色
- 4.3.4 绿色
- 4.3.5 橙色
- 5. 总结
- 6. 参考资料
- 7. 补充
1. 源由
在本章中,将了解计算机视觉中使用的流行颜色空间,并将其用于基于颜色的分割。
- 不同颜色空间定义
- 基于颜色图像分割
记得曾经有人谈到,什么是科学? 或者说对于我们来说科学的定义是什么?
Science is a rigorous, systematic endeavor that builds and organizes knowledge in the form of testable explanations and predictions about the world.
这里话题稍微展开一些,因为,从工程技术的角度来说,个人感觉国内目前更多偏于浮躁,注重功利性。因为,目前工程技术在企业、社会上更多的认知是解决问题。
从个人的观点来看,其实科学的定义在wiki百科上讲的非常清楚,换言之,讲的是逻辑和道理。
- 知识体系
- 可解释
- 可预测
因为企业的逐利性,社会的导向性,过于表面的注重解决实际应用问题,而忽略了逻辑和道理。导致很多表现上只要解决问题,就觉得好了,成功了。而真正的本质没有讲清楚或者深入研究清楚,进而无法将科学更好的应用于生产力。
通常也是大家可以看到,很多人似乎能解决问题,但是无法用言语表达清楚,甚至用纸笔记录下来,因为这些问题的解决是一种表象,内部实质问题没有了解清楚。
我可能多说了很多“废话”,希望国内这种浮躁的科学技术作风能有所改善!
2. 颜色空间
颜色空间可以简单的理解为色彩在不同坐标系下的展开方式。
正交坐标系统,通常理解为不同单位向量之间是解耦的关系。对于非正交系统来说,单位向量有松耦合,甚至紧耦合的关系。而颜色在不同坐标系统下的展开也会影响到对于特征的判断。
在计算机视觉里面也有类似的问题,这是一个物理到计算机语言的表达过程。这里就凸显基础学科的重要性,通过定义,基本原理和逻辑来给出解决方案。当然应用方面,“拿来主义”也能出色的完成工作,但是背后的逻辑思路,以及遇到复杂问题的分析能力将会在后续的研发、研究上阻碍技术的发展。
希望通过这些点滴思考,能够对于当下社会浮躁研发氛围有所触发和讨论。当然,总的方向是好的,只不过。。。。
大体上计算机视觉上有以下颜色空间:
- RGB颜色空间
- LAB颜色空间
- YCrCb颜色空间
- HSV颜色空间
2.1 RGB颜色空间
定义:
A linear combination of Red, Green, and Blue values.
The three channels are correlated by the amount of light hitting the surface.
下面是同一个物体在不同光照条件下的对比分析:
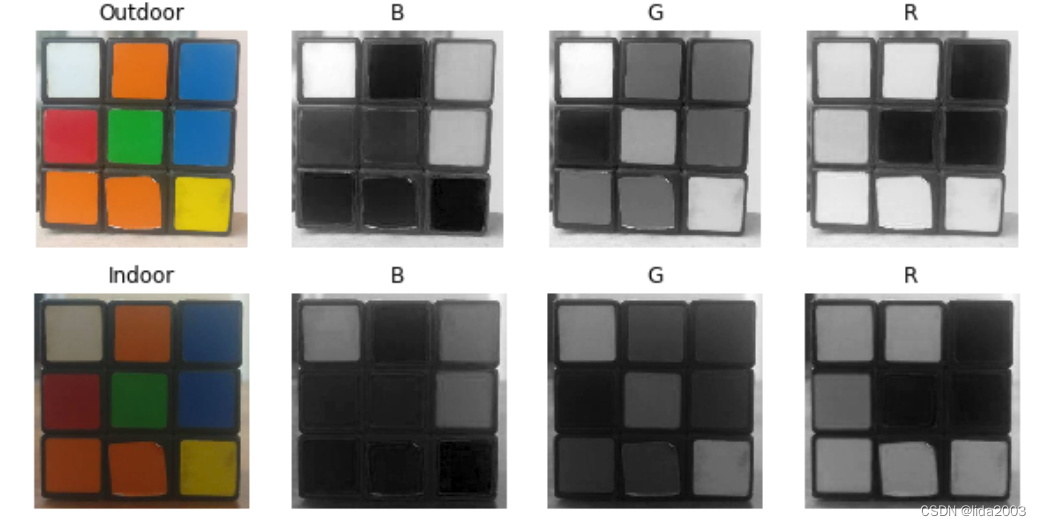
- 显著的感知不一致性
- 色度(颜色相关信息)和亮度(强度相关信息)数据的混合
换句话说:其坐标系是非解耦的,有相关性;当亮度变化的时候,RGB都会发生变化。
默认读入的文件数据就是BGR格式:
C++:
//C++
bright = cv::imread('cube1.jpg')
dark = cv::imread('cube8.jpg')
Python:
#python
bright = cv2.imread('cube1.jpg')
dark = cv2.imread('cube8.jpg')
2.2 LAB颜色空间
定义:
L – Lightness ( Intensity ).
a – color component ranging from Green to Magenta.
b – color component ranging from Blue to Yellow.
下面是同一个物体在不同光照条件下的对比分析:
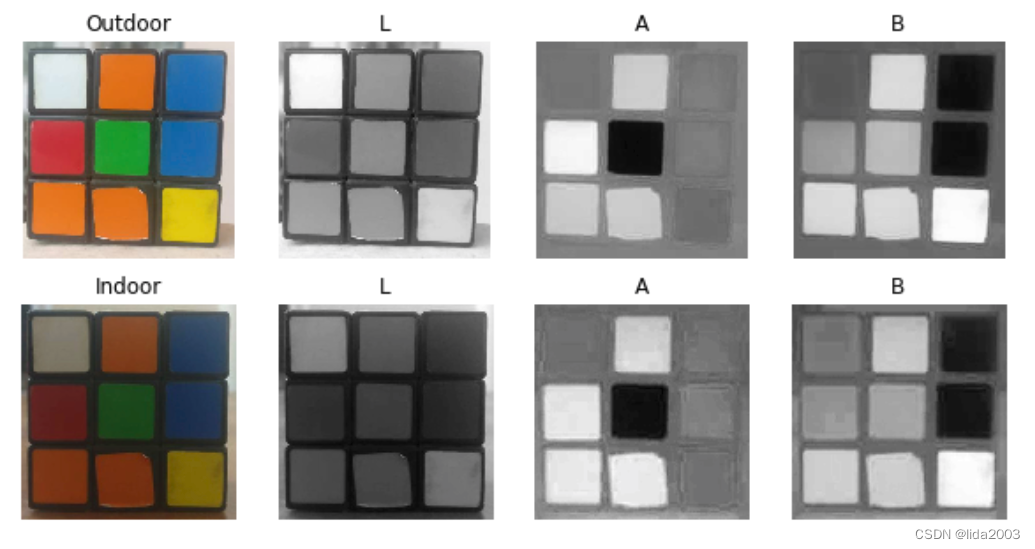
- 感知均匀的颜色空间,近似于我们感知颜色的方式
- 独立于设备(捕捉或显示)
- 在Adobe Photoshop中广泛使用
- 通过一个复杂的变换方程与RGB颜色空间相关的。
BGR转换:
C++:
//C++
cv::cvtColor(bright, brightLAB, cv::COLOR_BGR2LAB);
cv::cvtColor(dark, darkLAB, cv::COLOR_BGR2LAB);
Python:
#python
brightLAB = cv2.cvtColor(bright, cv2.COLOR_BGR2LAB)
darkLAB = cv2.cvtColor(dark, cv2.COLOR_BGR2LAB)
2.3 YCrCb颜色空间
定义:
Y – Luminance or Luma component obtained from RGB after gamma correction.
Cr = R – Y ( how far is the red component from Luma ).
Cb = B – Y ( how far is the blue component from Luma ).
下面是同一个物体在不同光照条件下的对比分析:
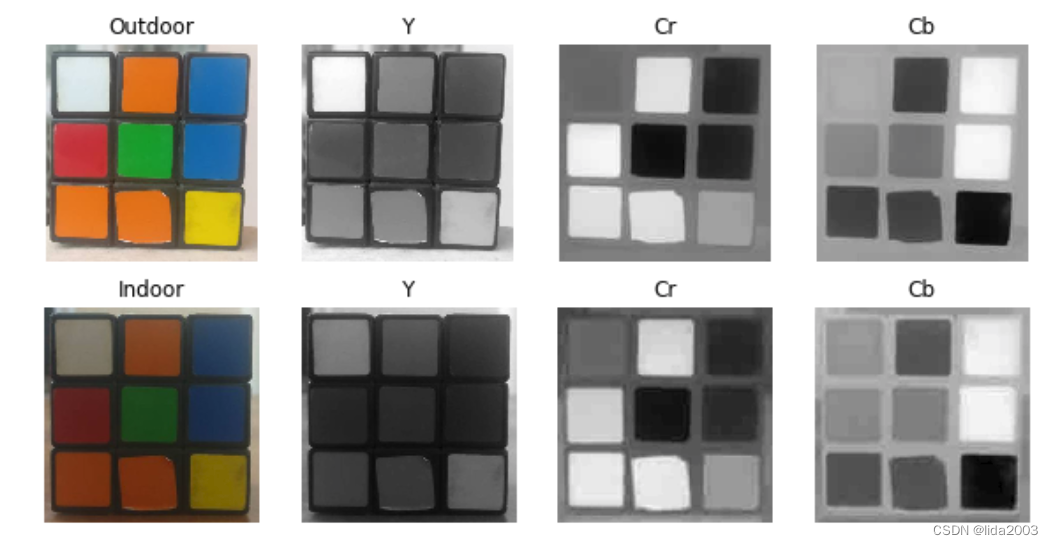
- 亮度与LAB类似的
- 与LAB相比,即使在室外图像中,红色和橙色之间的感知差异也较小
- 白色的所有三个组成部分都发生了变化
BGR转换:
C++:
//C++
cv::cvtColor(bright, brightYCB, cv::COLOR_BGR2YCrCb);
cv::cvtColor(dark, darkYCB, cv::COLOR_BGR2YCrCb);
Python:
#python
brightYCB = cv2.cvtColor(bright, cv2.COLOR_BGR2YCrCb)
darkYCB = cv2.cvtColor(dark, cv2.COLOR_BGR2YCrCb)
2.4 HSV颜色空间
定义:
H – Hue ( Dominant Wavelength ).
S – Saturation ( Purity / shades of the color ).
V – Value ( Intensity ).
下面是同一个物体在不同光照条件下的对比分析:
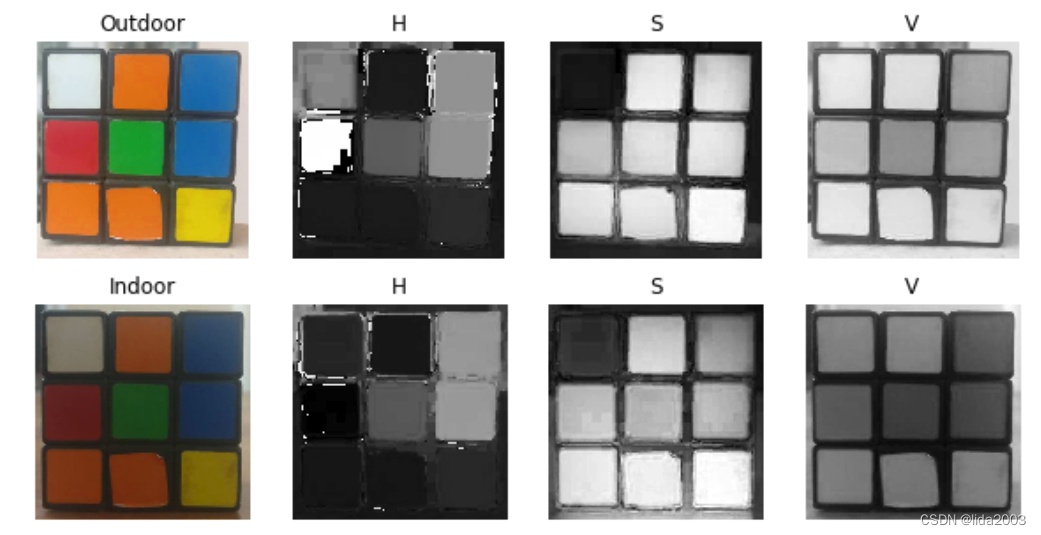
- H分量在两个图像中都非常相似,这表明即使在照明变化的情况下颜色信息也是完整的
- S分量在两幅图像中也非常相似
- V分量捕捉落在其上的光量,因此它会因照明变化而变化
- 室外和室内图像的红色部分的值之间存在巨大差异。这是因为色调表示为一个圆形,而红色处于起始角度。因此,它可以取介于[300360]和[0,60]之间的值
BGR转换:
C++:
//C++
cv::cvtColor(bright, brightHSV, cv::COLOR_BGR2HSV);
cv::cvtColor(dark, darkHSV, cv::COLOR_BGR2HSV);
Python:
#python
brightHSV = cv2.cvtColor(bright, cv2.COLOR_BGR2HSV)
darkHSV = cv2.cvtColor(dark, cv2.COLOR_BGR2HSV)
3 代码工程结构
3.1 C++应用Demo
C++应用Demo工程结构:
007_color_spaces/CPP$ tree . -L 1
.
├── CMakeLists.txt
├── interactive_color_detect.cpp
├── interactive_color_segment.cpp
├── images
└── pieces2 directories, 3 files
C++示例编译前,确认OpenCV安装路径:
$ find /home/daniel/ -name "OpenCVConfig.cmake"
/home/daniel/OpenCV/installation/opencv-4.9.0/lib/cmake/opencv4/
/home/daniel/OpenCV/opencv/build/OpenCVConfig.cmake
/home/daniel/OpenCV/opencv/build/unix-install/OpenCVConfig.cmake$ export OpenCV_DIR=/home/daniel/OpenCV/installation/opencv-4.9.0/lib/cmake/opencv4/
C++应用Demo工程编译执行:
$ mkdir build
$ cd build
$ cmake ..
$ cmake --build . --config Release
$ cd ..
$ ./build/interactive_color_detect
$ ./build/interactive_color_segment
3.2 Python应用Demo
Python应用Demo工程结构:
007_color_spaces/Python$ tree . -L 1
.
├── data_analysis.py
├── interactive_color_detect.py
├── interactive_color_segment.py
├── images
└── pieces2 directories, 3 files
Python应用Demo工程执行:
$ sudo apt-get install tcl-dev tk-dev python-tk python3-tk
$ workoncv-4.9.0
$ pip install PyQt5 PySide2
$ python interactive_color_detect.py
$ python interactive_color_segment.py
$ python data_analysis.py
4. 重点分析
4.1 interactive_color_detect
- cvtColor(src, dst, code)
获取图像数据中一个点的色彩坐标数据:
C++:
Vec3b bgrPixel(img.at<Vec3b>(y, x));Mat3b hsv,ycb,lab;
// Create Mat object from vector since cvtColor accepts a Mat object
Mat3b bgr (bgrPixel);//Convert the single pixel BGR Mat to other formats
cvtColor(bgr, ycb, COLOR_BGR2YCrCb);
cvtColor(bgr, hsv, COLOR_BGR2HSV);
cvtColor(bgr, lab, COLOR_BGR2Lab);//Get back the vector from Mat
Vec3b hsvPixel(hsv.at<Vec3b>(0,0));
Vec3b ycbPixel(ycb.at<Vec3b>(0,0));
Vec3b labPixel(lab.at<Vec3b>(0,0));
Python:
# get the value of pixel from the location of mouse in (x,y)
bgr = img[y,x]# Convert the BGR pixel into other colro formats
ycb = cv2.cvtColor(np.uint8([[bgr]]),cv2.COLOR_BGR2YCrCb)[0][0]
lab = cv2.cvtColor(np.uint8([[bgr]]),cv2.COLOR_BGR2Lab)[0][0]
hsv = cv2.cvtColor(np.uint8([[bgr]]),cv2.COLOR_BGR2HSV)[0][0]
4.2 interactive_color_segment
- inRange(src, lowerb, upperb, dst )
- bitwise_and(src1, src2, dst, mask)
使用mask过滤图像数据:
C++:
// Get values from the BGR trackbar
BMin = getTrackbarPos("BMin", "SelectBGR");
GMin = getTrackbarPos("GMin", "SelectBGR");
RMin = getTrackbarPos("RMin", "SelectBGR");BMax = getTrackbarPos("BMax", "SelectBGR");
GMax = getTrackbarPos("GMax", "SelectBGR");
RMax = getTrackbarPos("RMax", "SelectBGR");minBGR = Scalar(BMin, GMin, RMin);
maxBGR = Scalar(BMax, GMax, RMax);// Get values from the HSV trackbar
HMin = getTrackbarPos("HMin", "SelectHSV");
SMin = getTrackbarPos("SMin", "SelectHSV");
VMin = getTrackbarPos("VMin", "SelectHSV");HMax = getTrackbarPos("HMax", "SelectHSV");
SMax = getTrackbarPos("SMax", "SelectHSV");
VMax = getTrackbarPos("VMax", "SelectHSV");minHSV = Scalar(HMin, SMin, VMin);
maxHSV = Scalar(HMax, SMax, VMax);// Get values from the LAB trackbar
LMin = getTrackbarPos("LMin", "SelectLAB");
aMin = getTrackbarPos("AMin", "SelectLAB");
bMin = getTrackbarPos("BMin", "SelectLAB");LMax = getTrackbarPos("LMax", "SelectLAB");
aMax = getTrackbarPos("AMax", "SelectLAB");
bMax = getTrackbarPos("BMax", "SelectLAB");minLab = Scalar(LMin, aMin, bMin);
maxLab = Scalar(LMax, aMax, bMax);// Get values from the YCrCb trackbar
YMin = getTrackbarPos("YMin", "SelectYCB");
CrMin = getTrackbarPos("CrMin", "SelectYCB");
CbMin = getTrackbarPos("CbMin", "SelectYCB");YMax = getTrackbarPos("YMax", "SelectYCB");
CrMax = getTrackbarPos("CrMax", "SelectYCB");
CbMax = getTrackbarPos("CbMax", "SelectYCB");minYCrCb = Scalar(YMin, CrMin, CbMin);
maxYCrCb = Scalar(YMax, CrMax, CbMax);// Convert the BGR image to other color spaces
original.copyTo(imageBGR);
cvtColor(original, imageHSV, COLOR_BGR2HSV);
cvtColor(original, imageYCrCb, COLOR_BGR2YCrCb);
cvtColor(original, imageLab, COLOR_BGR2Lab);// Create the mask using the min and max values obtained from trackbar and apply bitwise and operation to get the results
inRange(imageBGR, minBGR, maxBGR, maskBGR);
resultBGR = Mat::zeros(original.rows, original.cols, CV_8UC3);
bitwise_and(original, original, resultBGR, maskBGR);inRange(imageHSV, minHSV, maxHSV, maskHSV);
resultHSV = Mat::zeros(original.rows, original.cols, CV_8UC3);
bitwise_and(original, original, resultHSV, maskHSV);inRange(imageYCrCb, minYCrCb, maxYCrCb, maskYCrCb);
resultYCrCb = Mat::zeros(original.rows, original.cols, CV_8UC3);
bitwise_and(original, original, resultYCrCb, maskYCrCb);inRange(imageLab, minLab, maxLab, maskLab);
resultLab = Mat::zeros(original.rows, original.cols, CV_8UC3);
bitwise_and(original, original, resultLab, maskLab);// Show the results
imshow("SelectBGR", resultBGR);
imshow("SelectYCB", resultYCrCb);
imshow("SelectLAB", resultLab);
imshow("SelectHSV", resultHSV);
Python:
# Get values from the BGR trackbar
BMin = cv2.getTrackbarPos('BGRBMin','SelectBGR')
GMin = cv2.getTrackbarPos('BGRGMin','SelectBGR')
RMin = cv2.getTrackbarPos('BGRRMin','SelectBGR')
BMax = cv2.getTrackbarPos('BGRBMax','SelectBGR')
GMax = cv2.getTrackbarPos('BGRGMax','SelectBGR')
RMax = cv2.getTrackbarPos('BGRRMax','SelectBGR')
minBGR = np.array([BMin, GMin, RMin])
maxBGR = np.array([BMax, GMax, RMax])# Get values from the HSV trackbar
HMin = cv2.getTrackbarPos('HMin','SelectHSV')
SMin = cv2.getTrackbarPos('SMin','SelectHSV')
VMin = cv2.getTrackbarPos('VMin','SelectHSV')
HMax = cv2.getTrackbarPos('HMax','SelectHSV')
SMax = cv2.getTrackbarPos('SMax','SelectHSV')
VMax = cv2.getTrackbarPos('VMax','SelectHSV')
minHSV = np.array([HMin, SMin, VMin])
maxHSV = np.array([HMax, SMax, VMax])# Get values from the LAB trackbar
LMin = cv2.getTrackbarPos('LABLMin','SelectLAB')
AMin = cv2.getTrackbarPos('LABAMin','SelectLAB')
BMin = cv2.getTrackbarPos('LABBMin','SelectLAB')
LMax = cv2.getTrackbarPos('LABLMax','SelectLAB')
AMax = cv2.getTrackbarPos('LABAMax','SelectLAB')
BMax = cv2.getTrackbarPos('LABBMax','SelectLAB')
minLAB = np.array([LMin, AMin, BMin])
maxLAB = np.array([LMax, AMax, BMax])# Get values from the YCrCb trackbar
YMin = cv2.getTrackbarPos('YMin','SelectYCB')
CrMin = cv2.getTrackbarPos('CrMin','SelectYCB')
CbMin = cv2.getTrackbarPos('CbMin','SelectYCB')
YMax = cv2.getTrackbarPos('YMax','SelectYCB')
CrMax = cv2.getTrackbarPos('CrMax','SelectYCB')
CbMax = cv2.getTrackbarPos('CbMax','SelectYCB')
minYCB = np.array([YMin, CrMin, CbMin])
maxYCB = np.array([YMax, CrMax, CbMax])# Convert the BGR image to other color spaces
imageBGR = np.copy(original)
imageHSV = cv2.cvtColor(original,cv2.COLOR_BGR2HSV)
imageYCB = cv2.cvtColor(original,cv2.COLOR_BGR2YCrCb)
imageLAB = cv2.cvtColor(original,cv2.COLOR_BGR2LAB)# Create the mask using the min and max values obtained from trackbar and apply bitwise and operation to get the results
maskBGR = cv2.inRange(imageBGR,minBGR,maxBGR)
resultBGR = cv2.bitwise_and(original, original, mask = maskBGR) maskHSV = cv2.inRange(imageHSV,minHSV,maxHSV)
resultHSV = cv2.bitwise_and(original, original, mask = maskHSV)maskYCB = cv2.inRange(imageYCB,minYCB,maxYCB)
resultYCB = cv2.bitwise_and(original, original, mask = maskYCB) maskLAB = cv2.inRange(imageLAB,minLAB,maxLAB)
resultLAB = cv2.bitwise_and(original, original, mask = maskLAB) # Show the results
cv2.imshow('SelectBGR',resultBGR)
cv2.imshow('SelectYCB',resultYCB)
cv2.imshow('SelectLAB',resultLAB)
cv2.imshow('SelectHSV',resultHSV)
4.3 data_analysis
在4.2章节中,已经通过一个范围来对图像进行过滤,通过示例,可以看出RGB来进行过滤,在亮度发生变化的时候,其分类的效果非常差,简直不可用。
从实际情况来看,期望在颜色分量上,能够存在一个稳定的区间来进行过滤或判别。
本章节采用颜色空间色坐标上的数值来看图像的一致性(可辨性)。
- RGB空间:GB,RB,GR
- HSV空间:SH
- YCrCb空间:CbCr
- LAB空间:BA
由图可以看出,总体上LAB颜色空间的线性比例关系是最好,最易于用来进行颜色判别的。
详见代码:data_analysis.py
4.3.1 黄色

4.3.2 红色

4.3.3 蓝色

4.3.4 绿色

4.3.5 橙色

5. 总结
经过上面实验和讨论,可以比较清晰的看出,在颜色空间做颜色分类的时候,亮度(光照)对于RGB色坐标的影响是比较大的。
在计算机视觉应用这块,当遇到颜色分类的时候,可以使用LAB颜色空间,基于该AB坐标与亮度非耦合的特性来做分割应用会更加合适。
6. 参考资料
【1】ubuntu22.04@laptop OpenCV Get Started
【2】ubuntu22.04@laptop OpenCV安装
【3】ubuntu22.04@laptop OpenCV定制化安装
7. 补充
学习是一种过程,这里关于《ubuntu22.04@laptop OpenCV Get Started》的记录也是过程。因此,很多重复的代码或者注释,就不会展开讨论,甚至提及。
有兴趣了解更多的朋友,请从[《ubuntu22.04@laptop OpenCV Get Started》](ubuntu22.04@laptop OpenCV Get Started)开始,一个章节一个章节的了解,循序渐进。


![[1-docker-01]centos环境安装docker](https://img-blog.csdnimg.cn/direct/6dba3d59df004523973f1e7c35c5f7d5.png)