1、相机选型
在选择机器视觉相机时,通常需要考虑以下几个方面:
1、分辨率:相机的分辨率决定了其拍摄图像的清晰度和细节程度。根据具体的应用需求,可以选择适当的分辨率范围。
2、帧率:帧率表示相机每秒钟能够拍摄的图像帧数,对于一些快速运动的物体或需要实时处理的场景,高帧率的相机可能更为合适。
3、接口:相机的接口类型包括USB、GigE、Camera Link、CoaXPress等,需要根据实际情况选择合适的接口以便与其他设备连接和数据传输。
4、光学参数:包括镜头类型、焦距、光圈等,根据具体应用需要选择适当的光学参数。
5、高速成像能力:对于一些需要进行高速成像或快速检测的应用,需要选择具有高速成像能力的相机。
6、环境适应能力:一些特殊的工业环境可能对相机有特殊的要求,比如防尘防水、耐高温等能力。
7、支持的软件和平台:相机所支持的软件开发工具和平台也是选择的考量因素之一,这将影响到后续的图像处理和数据分析工作。

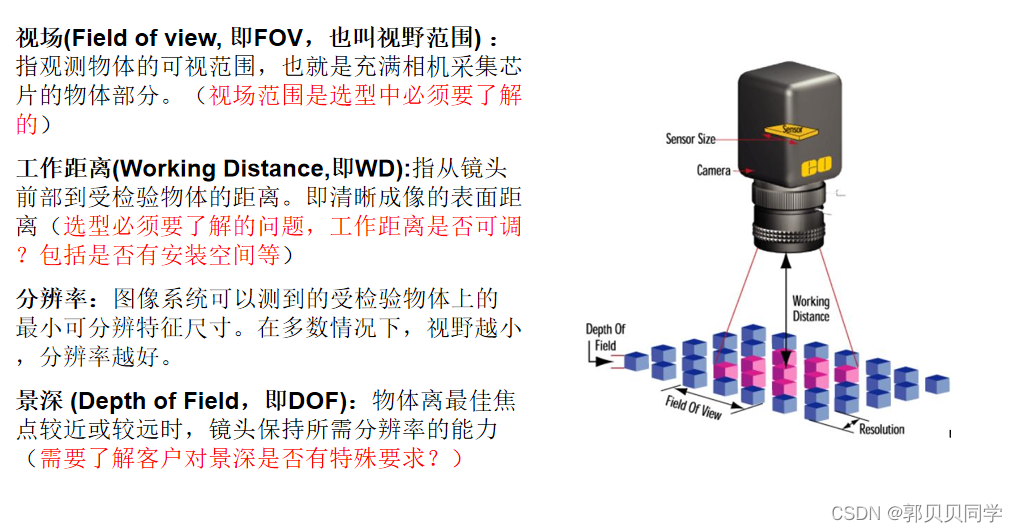
焦距: 指镜头光学后主点到焦点的距离。镜头焦距的长短决定着拍摄的工作距离、成像大小、视场角大小及景深大小。常用的FA镜头焦距为4mm、6mm、8mm、12mm、16mm、25mm、35mm、50mm、75mm等。
工作距离: 目标到镜头之间的距离
视场/视场角: 指镜头能观测到的实际范围的物理尺寸,可以用视场 “ 长x宽 ” 或者 ” 视场角 ”表示
放大倍率: 光学放大倍率用 ” β”表示
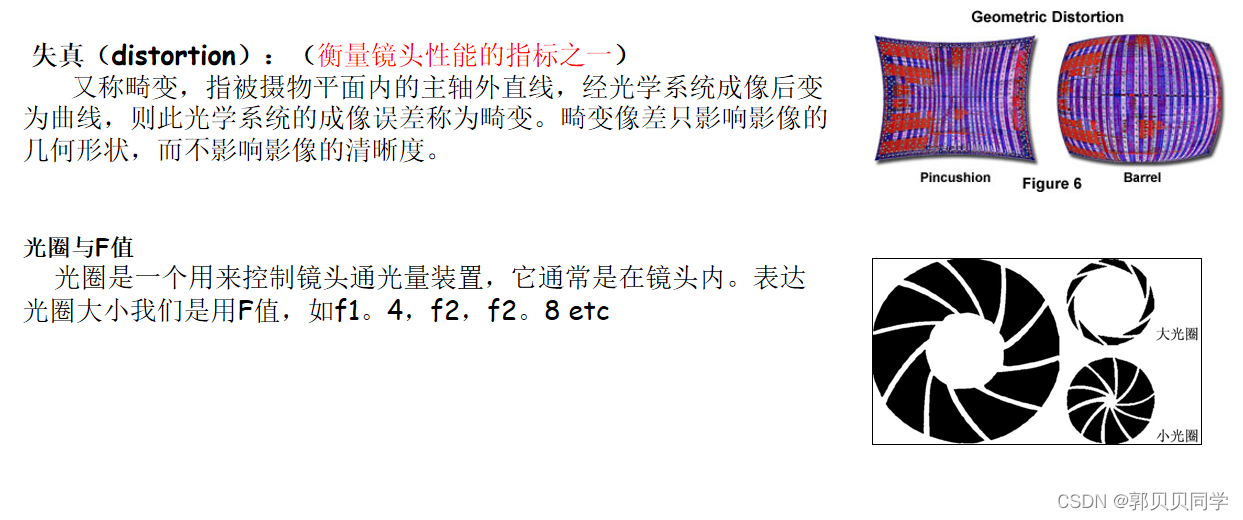
光圈: 控制镜头通光量的光学装置,光圈数一般用F值表示,常用值为1.4、2、2.8、4、5.6、8、11
光圈数F=焦距f/通光孔径d,F数越小,通光孔径越大,光圈越大
靶面尺寸(靶面尺寸是指摄像机或相机传感器的有效成像区域的物理尺寸。)
1英寸——靶面尺寸为宽 12.8mm高 9.6mm
1.1英寸——靶面尺寸为宽 12mm高 12mm
4/3 英寸——靶面尺寸为宽18.5mm高 13.5mm
1/4英寸——靶面尺寸为宽 2.4mm高 3.2mm
1/3.6英寸——靶面尺寸为宽4mm高 3mm
1/3.2 英寸——靶面尺寸为宽4.54mm高 3.42mm
1/3英寸——靶面尺寸为宽4.8mm高 3.6mm
1/2.5英寸——靶面尺寸为宽 5.76mm高4.29mm
1/2.3 英寸——靶面尺寸为宽 6.16mm高4.62mm
1/2 英寸——靶面尺寸为宽6.4mm高 4.8mm
1/1.8 英寸——靶面尺寸为宽 7.18mm高 5.32mm
1/1.7 英寸——靶面尺寸为宽 7.6mm高 5.7mm
2/3 英寸——靶面尺寸为宽 8.8mm*高 6.6mm
检测精度
视野:
视觉系统视野要比实际产品稍大1/5
视觉精度:
理论视觉精度>实际精度 (一般实际精度对应3~5个像素)
计算公式:
单边视野/视觉精度=单边分辨率
相机芯片一般比例为3 : 4
相机选型案例
产品尺寸30mm * 20mm,公差大小±0.1mm,相机如何选择?
视觉精度=产品尺寸大小/10
视觉精度=0.1mm/10=0.01mm
相机视野要比产品尺寸稍大:35mm * 25mm
单边分辨率=35/0.01=3500 25/0.01=2500
3500 * 2500=875万像素 选择890万(4096 * 2160)即可
运动拍摄
拍摄场景:
飞拍(运动拍照),精准的体现出了全局曝光 的优势
**曝光方式:**全局曝光、考虑不产生拖影
计算公式:
曝光时间内,移动距离不超过一个像元尺寸
理论曝光时间Tmax=S像/V像
运动拍摄相机选型案例
产品运动速度为200mm/s,视觉精度为0.015mm,视野大小30mm * 20mm,6pc/s,相机该如何选择?
相机分辨率 = (30/0.015)*(20/0.015)=266.6万像素
每秒6pcs产品,相机帧率要大于6帧;
运动拍摄,理论曝光时间T<0.015/200=75us
综上,可选择320万(2048*1536)全局相机
计算公式总结:
- 视觉精度 = 公差大小 / 10
- 单边分辨率 = 视野的大小或产品尺寸(长或宽)/ 视觉精度(像素)/ 2(亚像素)
- 选择的像素=单边分辨率(长)* 单边分辨率(宽)
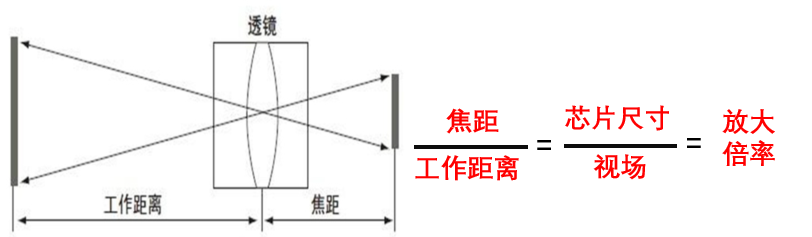
- 焦距(f)=工作距离(镜头到目标的距离 WD)* 芯片尺寸( CCD靶面型号的尺寸)/ 视场大小或者物体高度(FOV)
- 光学放大倍数 = 芯片尺寸( CCD靶面型号的尺寸)/ 视场大小或者物体高度(FOV)
- 系统放大倍率 = 芯片短边( CCD靶面型号的尺寸)/ 视野短边
- 工作距离(WD)=焦距(f)* 芯片尺寸( CCD靶面型号的尺寸) / 视场大小或者物体高度(FOV)
- 工作距离(WD)=焦距(f)/ 倍率
- 视场大小或者物体高度(FOV)=工作距离(WD)* 芯片尺寸( CCD靶面型号的尺寸)/ 焦距(f)
- 芯片尺寸(CCD靶面型号的尺寸) = 像元尺寸(长或宽)* 单边分辨率(长或宽)/ 1000(转mm)
- 工作高度 = 焦距 / 倍率
2、工业镜头选型
镜头物理接口类型
镜头的接口尺寸是有国际标准的,共有三种接口型式,即F型、C型、CS型。F型接口是通用型接口,
一般适用于焦距大于25mm的镜头;而当镜头的焦距约小于25mm时,因镜头的尺寸不大,
便采用C型或CS型接口。
镜头参数
焦距(f) 焦距,是光学系统中衡量光的聚集或发散的度量方式,指从透镜的光心到光聚集之焦点的距离。亦是照相机中,从镜片中心到底片或CCD等成像平面的距离。
公式:
(焦距)f={工作距离/视野范围长边(或短边)}X CCD长(或短)
焦距大小的影响情况:焦距越小,景深越大; 焦距越小,畸变越大; 焦距越小,渐晕现象越严重,使像差边缘的照度降低。
工业镜头选型案例
案例分析:
已知条件:工业相机型号已经选择好,具体参数:工业相机芯片尺寸为2/3",C接口,5百万像素;
视野是100*100mm, 工作距离:500mm;
根据以上条件,我们来选择合适的工业镜头;
镜头接口: 首先工业镜头要和工业相机接口一致,所以这里也选择C接口;
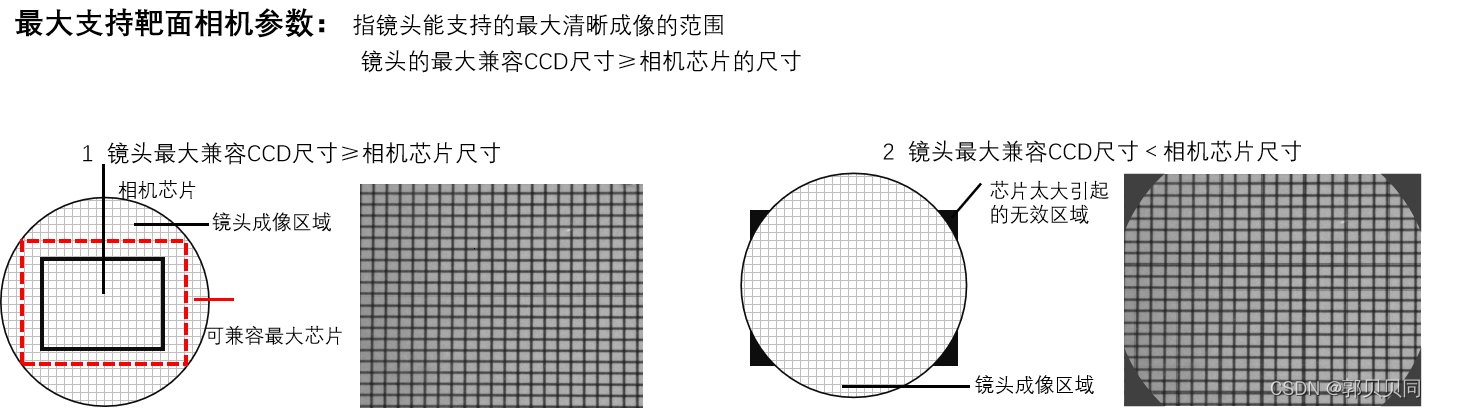
镜头大小: 遵循镜头大小要大于相机的芯片大小,所以这里镜头尺寸最少支持2/3";
镜头分辨率: 镜头的分辨率要高于相机的分辨率,所以选择5百万像素以上;
焦距: 500(工作距离)× 8.8(芯片水平长度)/ 100(视野)=44mm;
镜头放大倍率: 8.8(芯片水平长度)/ 100=0.088
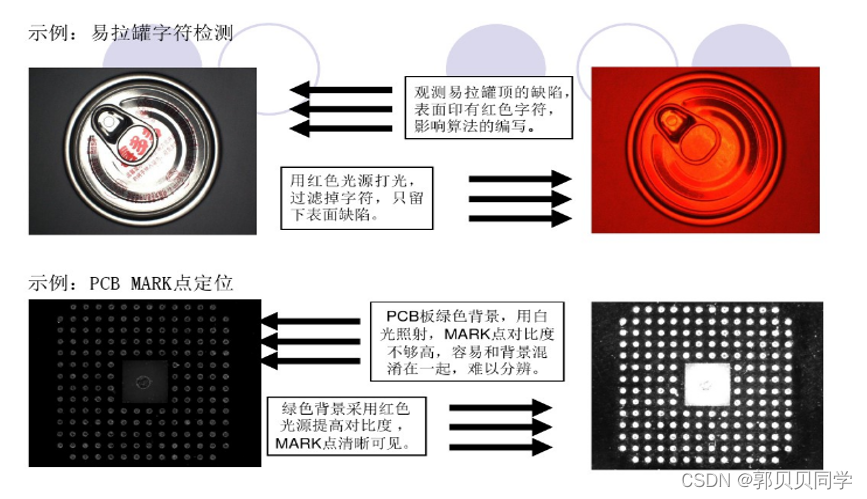
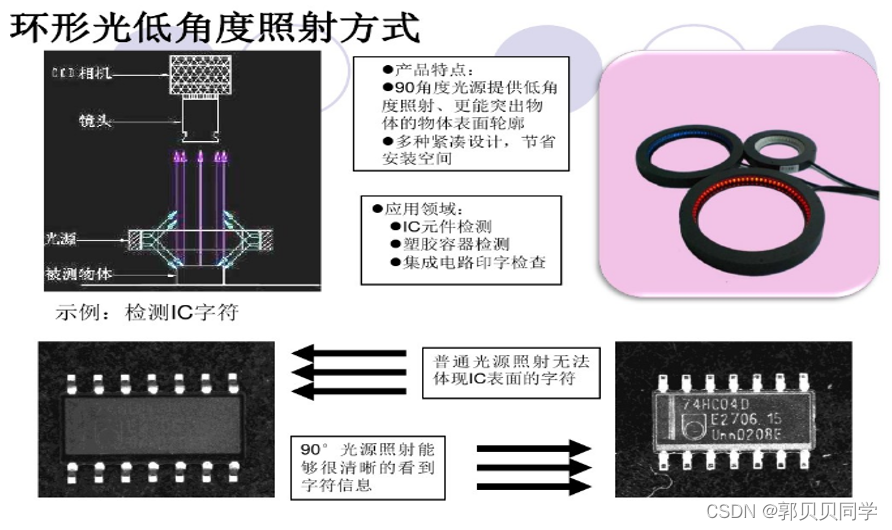
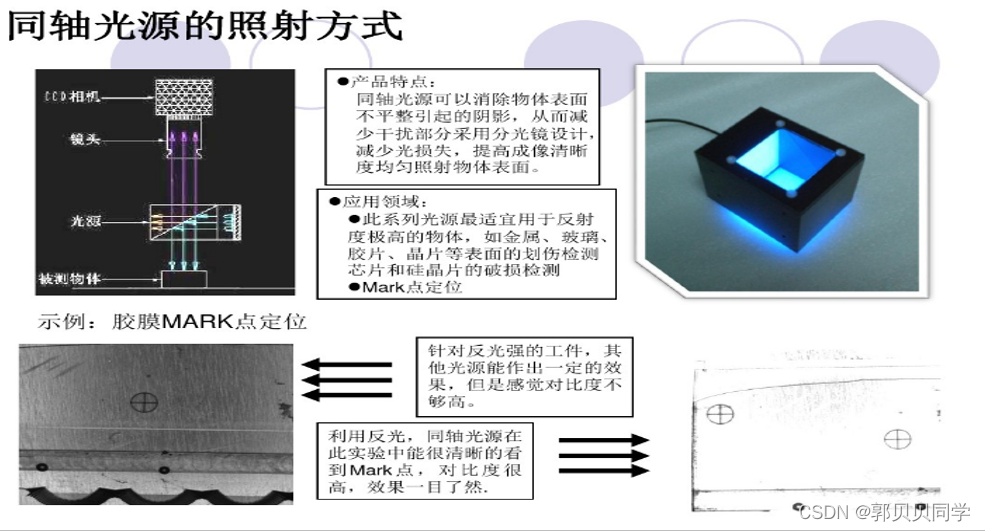
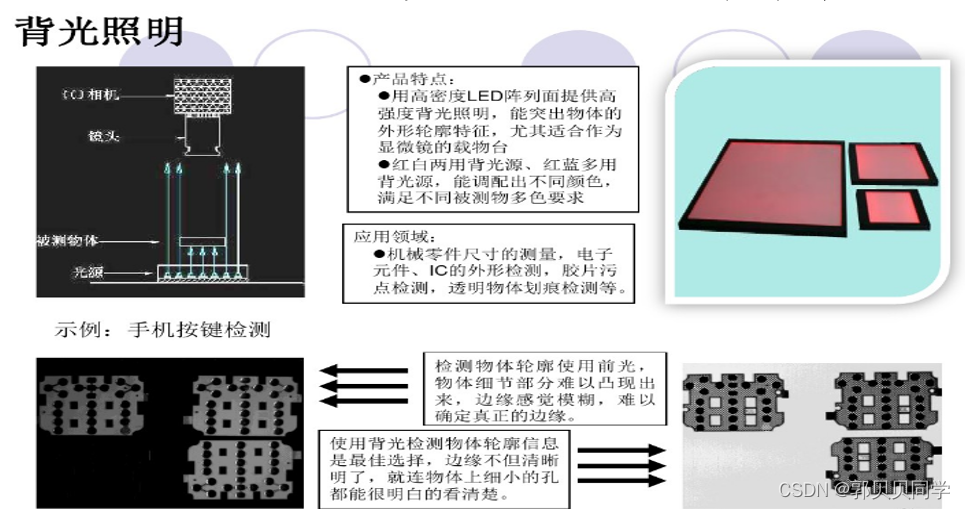
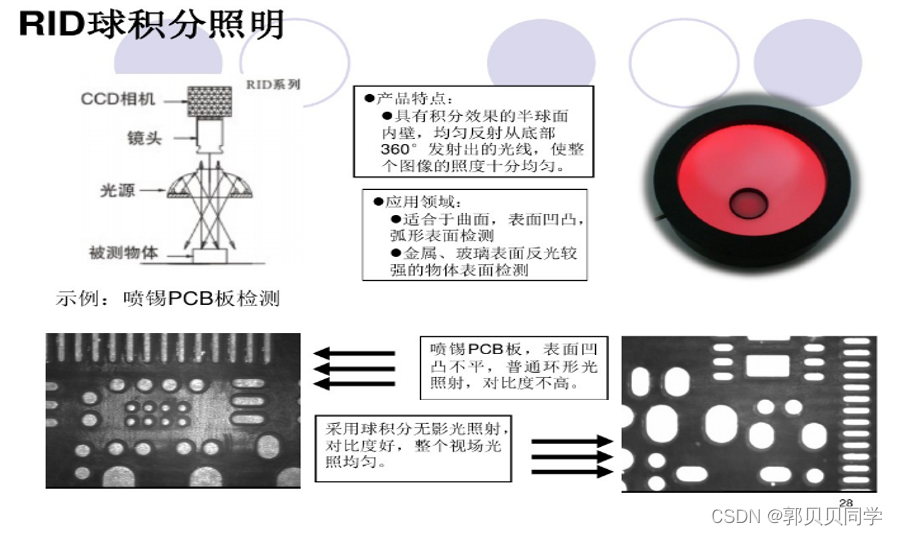
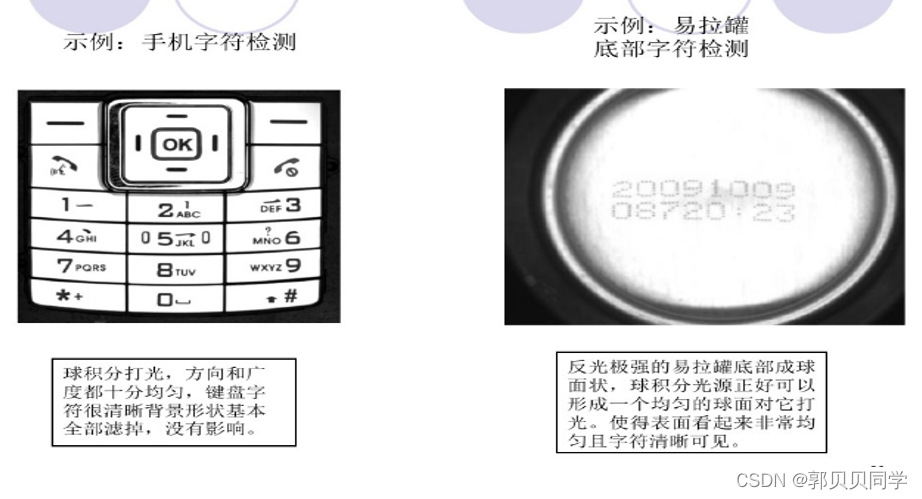
3、光源选型
光的反射定律:反射光线与入射光线、法线在同一平面上,反射光线和入射光线分居在法线的两侧;反射角等于入射角。背光源的原理:利用光源发光,并通过液晶屏幕的控制,使得图像能够显示出来。同轴光原理:指在光学系统中,采用同一光轴传输的光线,以实现光学成像或光学效果的原理。在同轴光系统中,光线沿着同一轴线传输,减少了光线的散射和干扰,有利于提高成像质量和系统稳定性。非同轴漫射光原理:指在光学系统中,光线不沿着同一轴线传输,而是以散射的方式传播的原理。这种光线传输方式通常用于照明系统或投影系统中,其特点是能够实现均匀、柔和的光线分布。偏振光:是在振动方向上具有一定规律的光,其原理涉及到光波的振动方向和传播方向。光是一种电磁波,它的电场和磁场垂直于光的传播方向,并以横波的形式传播。当光波的电场振动方向被限制在特定方向上时,就产生了偏振光。红外光原理:红外光是一种波长介于可见光和微波之间的电磁辐射,波长范围通常为0.75微米到1000微米。红外光在光谱中处于可见光的下方,因此人眼无法直接看到红外光。红外光原理是基于物体的红外辐射特性和红外光与物质相互作用。紫外光原理:紫外光是指波长较短的紫外线辐射,波长范围大致在10纳米到400纳米之间。紫外光在光谱中处于可见光的上方,人眼无法直接看到紫外光。紫外光原理是基于物质对紫外辐射的吸收特性和紫外光与物质相互作用的原理,通过紫外光源和光学系统实现了对紫外光的产生、利用和应用。彩色原理:指人类视觉系统是如何感知和识别不同颜色的。彩色的感知是通过人眼中的视锥细胞来实现的,这些细胞对不同波长的光有不同的反应,从而使我们能够看到丰富多彩的世界。色环原理:指色彩空间中的一种表示方法,通常用于描述和组织颜色之间的关系。在色环中,颜色被排列在一个圆环或者圆柱状的空间中,以便更直观地展示不同颜色之间的相对位置和关联。通过色相、饱和度和亮度这三个属性,色环可以很好地描述和组织各种颜色之间的关系。
工业光源选型案例
![[linux][xdp] xdp 入门](https://img-blog.csdnimg.cn/direct/defd49fdfb1e473fa7d37798ec1bd8a1.png)

![[RAM] DDR5 自带双通道](https://img-blog.csdnimg.cn/direct/5a3a7bf87bb1465182a1eb508ef437be.png)