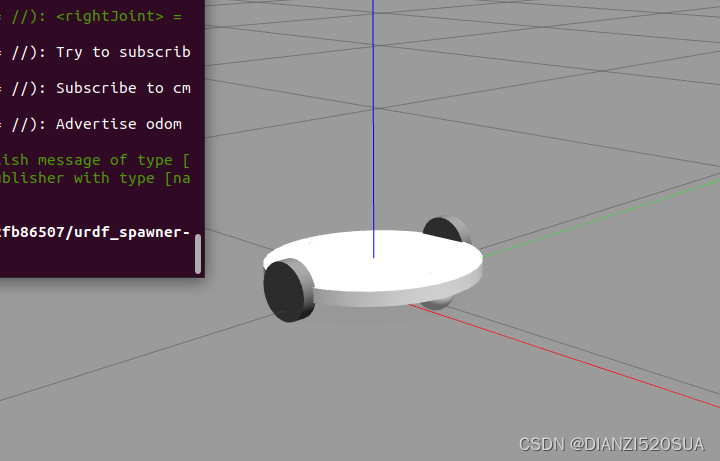
在rviz及gazebo练习差速轮式机器人时,很奇怪,只有个机器人的底板及底部的两个万向轮,如下图,

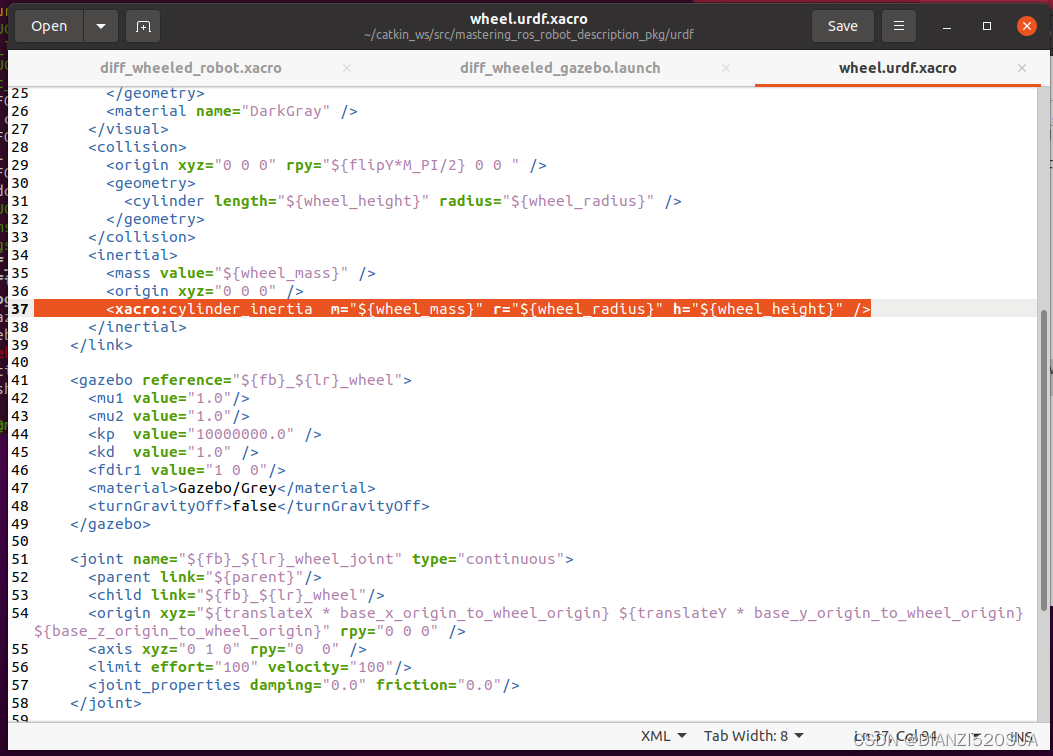
后来查看相关.xacro文件,里面是引用包含了轮子的xacro文件,只需传入不同的参数即可调用生成不同位置的轮子,精简了代码。找到定义轮子的xacro文件,在惯性那行增加xacro:即可,如下图所示,否则会找不到相关的值替换,自然不显示。
最终效果如下。
其他部件不显示的时候也可参考这种原因。
在rviz及gazebo练习差速轮式机器人时,很奇怪,只有个机器人的底板及底部的两个万向轮,如下图,
后来查看相关.xacro文件,里面是引用包含了轮子的xacro文件,只需传入不同的参数即可调用生成不同位置的轮子,精简了代码。找到定义轮子的xacro文件,在惯性那行增加xacro:即可,如下图所示,否则会找不到相关的值替换,自然不显示。
最终效果如下。
其他部件不显示的时候也可参考这种原因。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/280156.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!

![[python] 卡诺图化简](https://img-blog.csdnimg.cn/direct/b3adbf3952fc4dccaa206d464bf5f98f.png)