工作方式: UART异步全双工通信
目的: 通过串口实现多机通信
注:树莓派使用串口通信前需要进行一些配置
sudo vi /home/boot/cmdline.txt
需要将里面用于串口登录的console=serial0,115200 删除
dwc_otg.lpm_enable=0 console=serial0,115200 console=tty1 root=PARTUUID=cd48578f-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait quiet init=/usr/lib/raspi-config/init_resize.sh splash plymouth.ignore-serial-consoles然后sudo reboot
Tips:删除之后就无法通过串口登录树莓派,若需要串口登录再添加进去就ok了
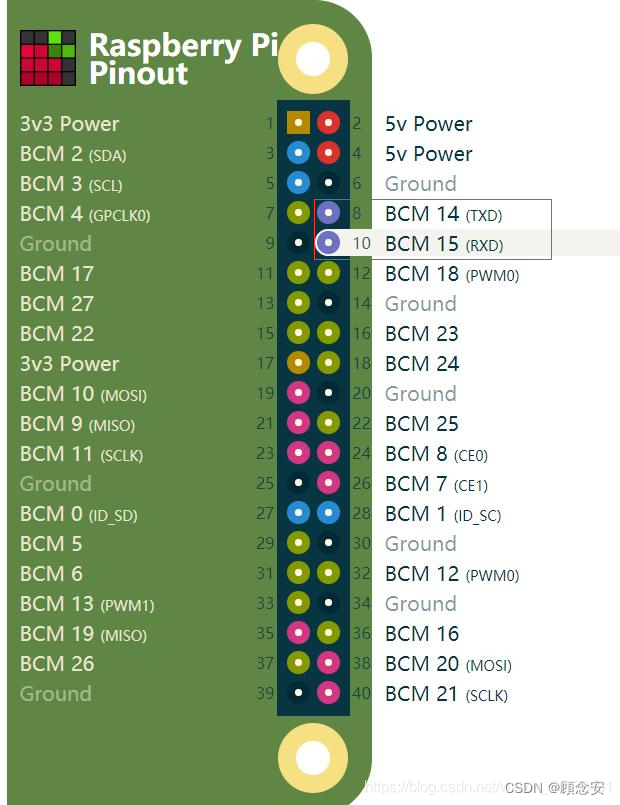
接线:列如使用USB转TTL让电脑和树莓派进行通信,树莓派的TXD则接转换模块的RXD,RXD接TXD交叉连接。同时需要把GND也接上,因为两个平台的电压可能不同,导致数据传输发生错误,接上GND可以稳个压
在树莓派中有封装好的wiringPi库,可以使用库函数进行通信
#include <wiringSerial.h>int serialOpen(char *device, int baud); // 打开并初始化串口返回值:调用成功返回文件描述符,失败返回 -1
device :串口的地址,在 Linux 中就是设备所在的目录,默认一般是 "/dev/ttyAMA0"
baud:波特率void serialClose(int fd); // 关闭 fd 关联串口void serialPutchar(int fd, unsigned char c); // 向串口发送一个字节的数据void serialPuts(int fd, char *s); // 发送一个字符串到串口void serialPrintf(int fd, char *message, …) // 向串口发送数据,用法类似 C语言中的 printf()int serialDataAvail(int fd); // 获取串口缓冲区可用的字节数,错误返回 -1int serialGetchar(int fd); /* 从串口读取一个字节数据并返回,如果串口缓冲区中没有可用的数据,则会等待大概10 秒,若 10 秒后仍
无数据,则返回-1,所以读取前最好调用 serialDataAvail() 判断,读取多个字符则采用地址偏移的方式读取 */void serialFlush(int fd); // 清空串口缓冲区#include <unistd.h>ssize_t read(int fd, void *buf, size_t count); // Linux 下的标准 IO库 函数
ssize_t write(int fd, const void *buf, size_t count); // Linux 下的标准 IO库 函数!注:在使用read函数对串口进行读取数据之前,最好先使用serialFlush函数对串口缓冲区进行刷新,不然可能会一直读不到数据。。。。。。(反正我在使用中出现过这种情况)
last:
1,一位大佬的wiring P i库详解
2,串口通信详解