
运行环境
数据库:MySql
编译器:Intellij IDEA
前端运行环境:node.js v12.13.0
JAVA版本:JDK 1.8
主要功能
基于Springboot的商城管理系统包含管理端和用户端两个部分,主要功能有:
- 管理端
-
- 首页
- 商品列表
- 添加商品
- 商品分类
- 商品品牌
- 商品规格
- 商品采购
- 供应商管理
- 订单列表
- 退货申请处理
- 退货原因设置
- 商品轮播图
- 管理员列表
- 顾客列表
- 角色列表
- 用户端
- 首页
- 分类
- 商品详情页
- 下单
- 个人中心
- 我的订单
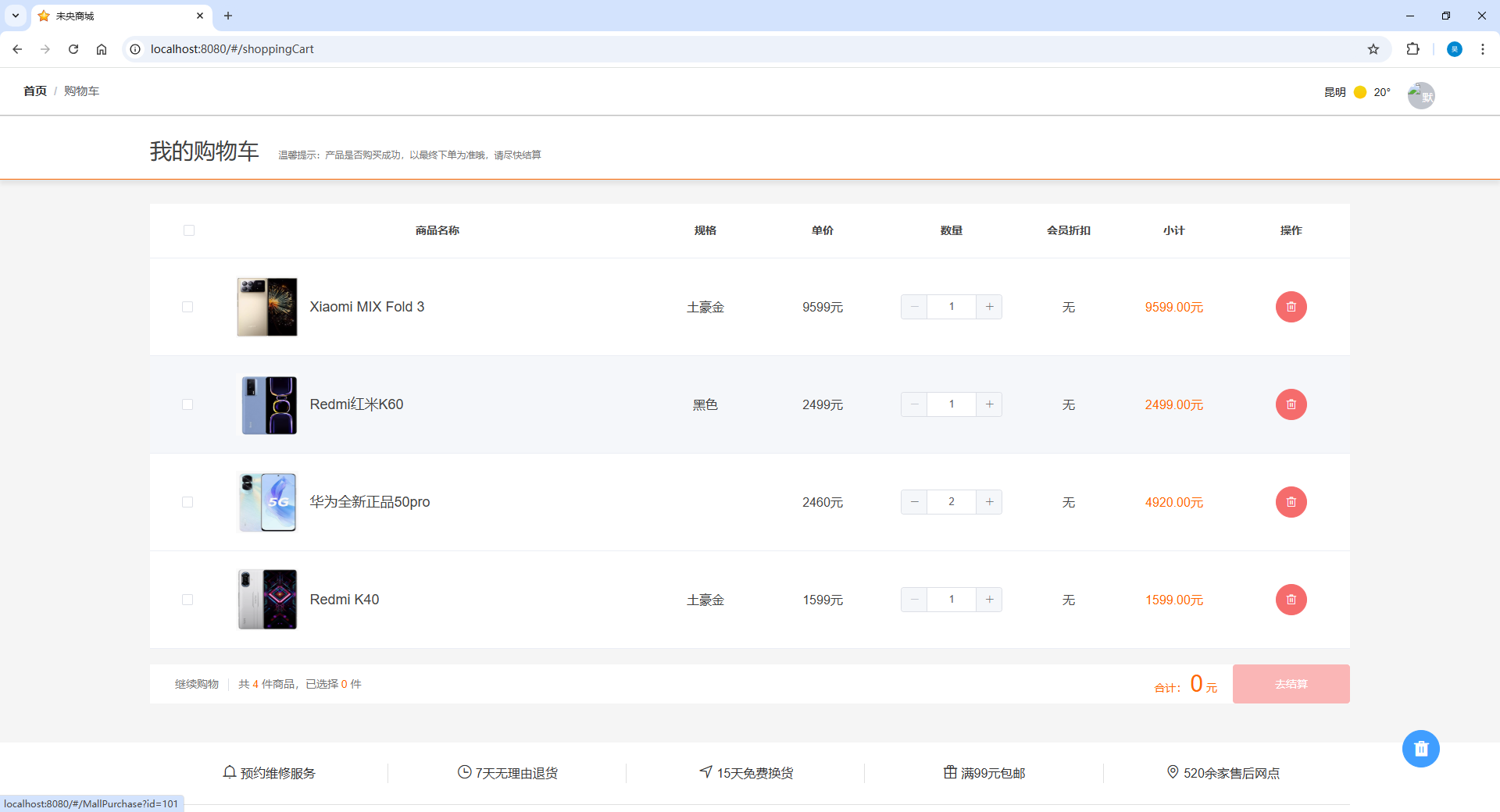
- 购物车
项目截图
管理端
首页

商品列表

添加商品

商品分类

商品品牌

商品规格

商品采购

供应商管理

订单列表

退货申请处理

退货原因设置

商品轮播图

管理员列表

顾客列表

角色列表

用户端
首页

分类

商品详情页

下单

个人中心

我的订单

购物车
源码地址:gitee.com/beginroad/bishe



















