系列文章目录
- 如何在前端项目中使用opencv.js | opencv.js入门
- 如何使用tensorflow.js实现面部特征点检测
- tensorflow.js 如何从 public 路径加载人脸特征点检测模型
- tensorflow.js 如何使用opencv.js通过面部特征点估算脸部姿态并绘制示意图
文章目录
- 系列文章目录
- 前言
- 一、实现步骤
- 1. 修改drawMesh.js文件为drawCanvas.js文件
- 2. 获取帧数信息并显示出来
- 3. 运行代码查看效果
- 总结
前言
本文将基于前文的工程进度,将人脸特征点网格(使用原生的canvas方法绘制)和姿态估计线(使用opencv.js+canvas绘制)统一起来,使用opencv.js绘制两者以达到更高的帧数。由于一部分工作基于前文,如果有一些跳跃或者不连贯的地方的疑问请参考前文,或者在评论区提出问题。
一、实现步骤
1. 修改drawMesh.js文件为drawCanvas.js文件
详细代码见drawCanvas.js
drawCanvas函数包含了drawTriangle和drawPoseLine函数,前者是绘制人脸特征点网格的关键函数后者是绘制姿态估计示意线的关键函数,在该文件中将原本的人脸特征点网格的实现修改为opencv.js实现,最终的帧数为60左右,与本机相机的默认帧数相同。
import { TRIANGULATION } from "./triangulation";export const drawCanvas = (prediction, canvas) => {if (!prediction) return;const keyPoints = prediction.keypoints;if (!keyPoints) return;const canvasMat = new window.cv.Mat.zeros(canvas.height,canvas.width,window.cv.CV_8UC4);for (let i = 0; i < TRIANGULATION.length / 3; i++) {const points = [TRIANGULATION[i * 3],TRIANGULATION[i * 3 + 1],TRIANGULATION[i * 3 + 2],].map((index) =>new window.cv.Point(Math.round(keyPoints[index].x),Math.round(keyPoints[index].y)));drawTriangle(canvasMat, points);}const circleColor = new window.cv.Scalar(0, 0, 255, 255);for (let i = 0; i < keyPoints.length; i++) {let center = new window.cv.Point(Math.round(keyPoints[i].x),Math.round(keyPoints[i].y));window.cv.circle(canvasMat, center, 2, circleColor);}drawPoseLine(canvasMat, keyPoints);window.cv.imshow(canvas.id, canvasMat);canvasMat.delete();
};const drawTriangle = (canvasMat, points) => {window.cv.line(canvasMat,points[0],points[1],new window.cv.Scalar(0, 0, 0, 255),1);window.cv.line(canvasMat,points[1],points[2],new window.cv.Scalar(0, 0, 0, 255),1);window.cv.line(canvasMat,points[2],points[0],new window.cv.Scalar(0, 0, 0, 255),1);
};function drawPoseLine(canvasMat, keyPoints) {// 右下眼 145 右上眼 159 左下眼 374 左上眼 386 下嘴唇14 上嘴唇13 鼻梁5 鼻头4// 面部上顶点 10 下顶点 152 左顶点 454 右顶点 234// 左嘴角 308 右嘴角 78// 左眼角 263 右眼角 33// 左眼开合距离const lEyeValue = Math.pow(Math.pow(keyPoints[374].x - keyPoints[386].x, 2) +Math.pow(keyPoints[374].y - keyPoints[386].y, 2),0.5);// 右眼开合距离const rEyeValue = Math.pow(Math.pow(keyPoints[145].x - keyPoints[159].x, 2) +Math.pow(keyPoints[145].y - keyPoints[159].y, 2),0.5);// 嘴巴开合距离const mouthValue = Math.pow(Math.pow(keyPoints[14].x - keyPoints[13].x, 2) +Math.pow(keyPoints[14].y - keyPoints[13].y, 2),0.5);// 左眼位置const lEyeX = (keyPoints[374].x + keyPoints[386].x) / 2;const lEyeY = (keyPoints[374].y + keyPoints[386].y) / 2;// 右眼位置const rEyeX = (keyPoints[145].x - keyPoints[159].x) / 2;const rEyeY = (keyPoints[145].y - keyPoints[159].y) / 2;// 脸中心const faceCenterX = ((lEyeX + rEyeX) / 2 + keyPoints[4].x) / 2;const faceCenterY = ((lEyeY + rEyeY) / 2 + keyPoints[4].y) / 2;//var modelPoints = window.cv.matFromArray(6, 3, window.cv.CV_32F, [0.0,0.0,0.0, // Nose tip0.0,-330.0,-65.0, // Chin-225.0,170.0,-135.0, // Left eye left corner225.0,170.0,-135.0, // Right eye right corne-150.0,-150.0,-125.0, // Left Mouth corner150.0,-150.0,-125.0, // Right mouth corner]);var imagePoints = window.cv.matFromArray(6, 2, window.cv.CV_32F, [keyPoints[4].x,keyPoints[4].y, // Nose tipkeyPoints[152].x,keyPoints[152].y, // ChinkeyPoints[263].x,keyPoints[263].y, // Left eye left cornerkeyPoints[33].x,keyPoints[33].y, // Right eye right cornekeyPoints[308].x,keyPoints[308].y, // Left Mouth cornerkeyPoints[78].x,keyPoints[78].y, // Right mouth corner]);var focal_length = canvasMat.cols;var center = [canvasMat.cols / 2, canvasMat.rows / 2];var cameraMatrix = window.cv.matFromArray(3, 3, window.cv.CV_64F, [focal_length,0,center[0],0,focal_length,center[1],0,0,1,]);// console.log("Camera Matrix", cameraMatrix.data64F);var distCoeffs = window.cv.matFromArray(4, 1, window.cv.CV_64F, [0, 0, 0, 0]); // Assuming no lens distortionvar rvec = new window.cv.Mat(3, 1, window.cv.CV_64F);var tvec = new window.cv.Mat(3, 1, window.cv.CV_64F);let ret_val = window.cv.solvePnP(modelPoints,imagePoints,cameraMatrix,distCoeffs,rvec,tvec,false,window.cv.SOLVEPNP_ITERATIVE // flags);if (!ret_val) return false;var rtn = getEulerAngle(rvec);var pitch = rtn[0]; // 俯仰角var yaw = rtn[1]; // 水平角var roll = rtn[2]; // 翻滚角// console.log("pitch:", pitch, "yaw:", yaw, "roll:", roll);var noseEndPoint2D = new window.cv.Mat(1, 2, window.cv.CV_64F);var jacobian = new window.cv.Mat(imagePoints.rows * 2, 13, window.cv.CV_64F);window.cv.projectPoints(window.cv.matFromArray(1, 3, window.cv.CV_64F, [0.0, 0.0, 700.0]),rvec,tvec,cameraMatrix,distCoeffs,noseEndPoint2D,jacobian);// 绘制线段,连接鼻尖和其它点var p1 = new window.cv.Point(Math.round(imagePoints.data32F[0]),Math.round(imagePoints.data32F[1]));var p2 = new window.cv.Point(Math.round(noseEndPoint2D.data64F[0]),Math.round(noseEndPoint2D.data64F[1]));window.cv.line(canvasMat, p1, p2, new window.cv.Scalar(255, 0, 0, 255), 2);modelPoints.delete();imagePoints.delete();cameraMatrix.delete();distCoeffs.delete();rvec.delete();tvec.delete();noseEndPoint2D.delete();jacobian.delete();return true;
}function getEulerAngle(rotationVector) {// calculate rotation angleslet theta = window.cv.norm(rotationVector, window.cv.NORM_L2);// transformed to quaternionlet w = Math.cos(theta / 2);let x = (Math.sin(theta / 2) * rotationVector.data64F[0]) / theta;let y = (Math.sin(theta / 2) * rotationVector.data64F[1]) / theta;let z = (Math.sin(theta / 2) * rotationVector.data64F[2]) / theta;let ysqr = y * y;// pitch (x-axis rotation)let t0 = 2.0 * (w * x + y * z);let t1 = 1.0 - 2.0 * (x * x + ysqr);// console.log("t0:", t0, "t1:", t1);let pitch = Math.atan2(t0, t1);// yaw (y-axis rotation)let t2 = 2.0 * (w * y - z * x);if (t2 > 1.0) {t2 = 1.0;}if (t2 < -1.0) {t2 = -1.0;}let yaw = Math.asin(t2);// roll (z-axis rotation)let t3 = 2.0 * (w * z + x * y);let t4 = 1.0 - 2.0 * (ysqr + z * z);let roll = Math.atan2(t3, t4);// console.log("pitch:", pitch, "yaw:", yaw, "roll:", roll);// 单位转换:将弧度转换为度let Y = parseInt((pitch / Math.PI) * 180);let X = parseInt((yaw / Math.PI) * 180);let Z = parseInt((roll / Math.PI) * 180);return [Y, X, Z];
}2. 获取帧数信息并显示出来
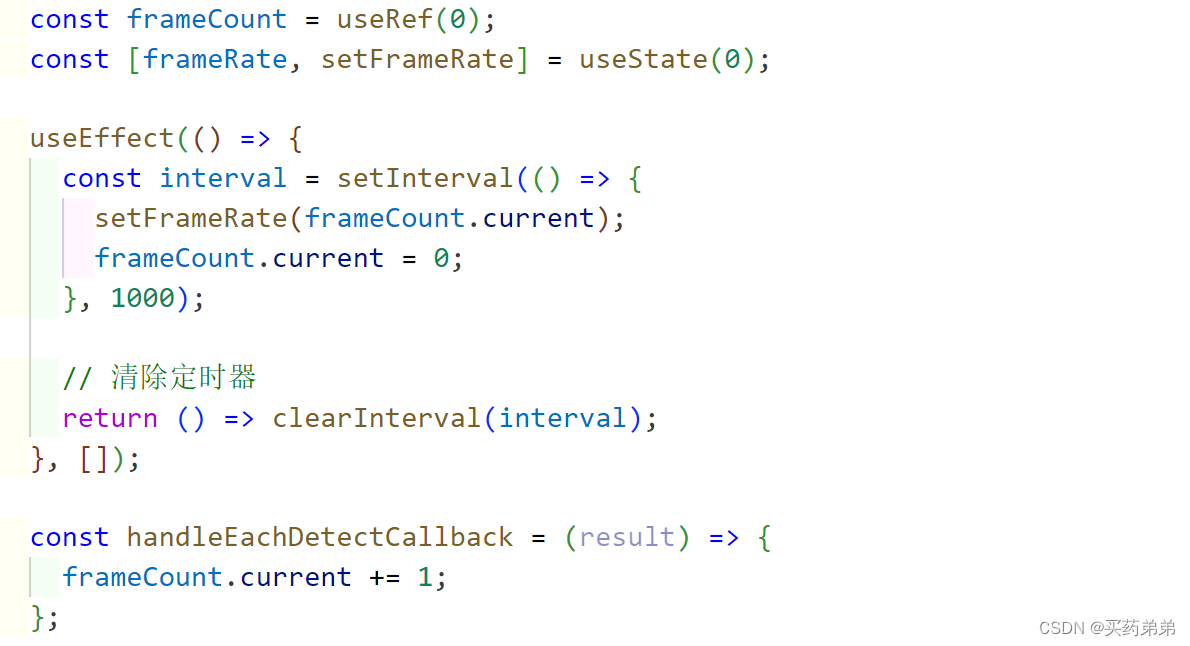
设计一个1秒间隔的定时器,和一个frameCount,定时器格一秒传出参数到frameRate并清零frameCount,frameCount在detector的callback函数中被增加,这样frameRate每个一秒就会获得当前的帧数,并触发组件更新,代码如下,详细代码见 index.js:
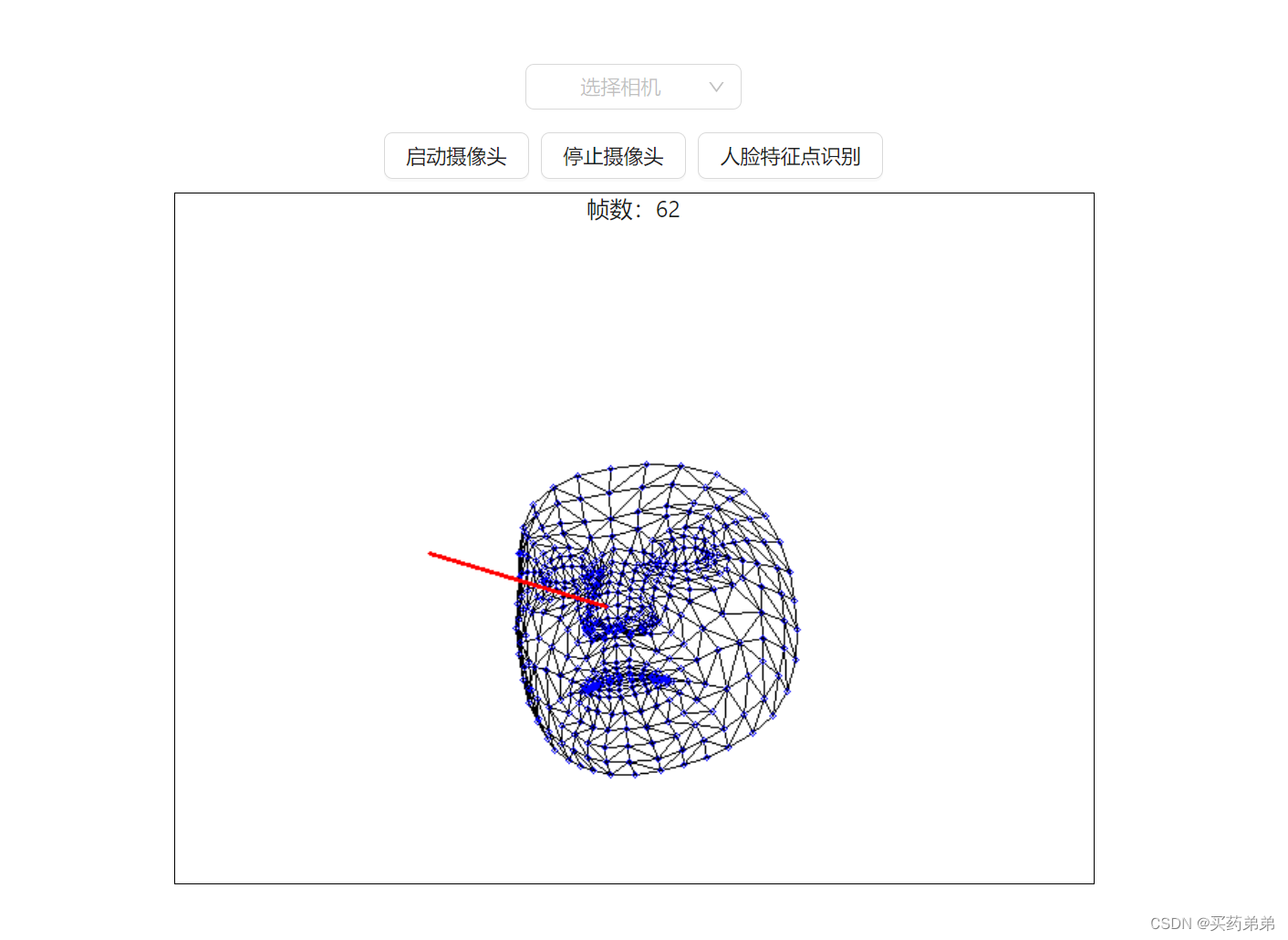
3. 运行代码查看效果
npm i -g yarn && yarn 安装依赖
npm start 运行项目,预览结果如下
总结
本文介绍了使用 opencv.js 将人脸特征点网格绘制与姿态估计线绘制结合起来,以获得更高的帧数,希望对您有所帮助,如果文章中存在任何问题、疏漏,或者您对文章有任何建议,请在评论区提出。