// 导入所需的OpenCV头文件
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/features2d.hpp>
// 导入向量和映射容器
#include <vector>
#include <map>
// 导入输入输出流库
#include <iostream>// 使用标准命名空间和OpenCV命名空间,避免在使用这些命名空间下的类型和函数时反复输入std::和cv::
using namespace std;
using namespace cv;// 帮助函数,用于提供程序的使用说明
static void help(char** argv)
{cout << "\n This program demonstrates how to use BLOB to detect and filter region \n"<< "Usage: \n"<< argv[0]<< " <image1(detect_blob.png as default)>\n"<< "Press a key when image window is active to change descriptor";
}// 函数Legende用于根据SimpleBlobDetector的参数pAct生成不同Blob检测条件的文字描述
static String Legende(SimpleBlobDetector::Params &pAct)
{// 创建一个空字符串s,用于存放最终生成的描述文字String s = "";// 如果启用了面积过滤器filterByAreaif (pAct.filterByArea){// 将最小面积minArea和最大面积maxArea转换成字符串表示,并追加到s中String inf = static_cast<const ostringstream&>(ostringstream() << pAct.minArea).str();String sup = static_cast<const ostringstream&>(ostringstream() << pAct.maxArea).str();s = " Area range [" + inf + " to " + sup + "]";}// 如果启用了圆度过滤器filterByCircularityif (pAct.filterByCircularity){// 将最小圆度minCircularity和最大圆度maxCircularity转换成字符串表示,并追加到s中String inf = static_cast<const ostringstream&>(ostringstream() << pAct.minCircularity).str();String sup = static_cast<const ostringstream&>(ostringstream() << pAct.maxCircularity).str();// 判断之前的描述文字s是否为空,如果为空则直接赋值,不为空则添加"AND"进行连接if (s.length() == 0)s = " Circularity range [" + inf + " to " + sup + "]";elses += " AND Circularity range [" + inf + " to " + sup + "]";}// 如果启用了颜色过滤器filterByColorif (pAct.filterByColor){// 将Blob的颜色blobColor转换为整数并转换成字符串表示,然后追加到s中String inf = static_cast<const ostringstream&>(ostringstream() << (int)pAct.blobColor).str();// 判断之前的描述文字s是否为空,如果为空则直接赋值,不为空则添加"AND"进行连接if (s.length() == 0)s = " Blob color " + inf;elses += " AND Blob color " + inf;}// 如果启用了凸度过滤器filterByConvexityif (pAct.filterByConvexity){// 将最小凸度minConvexity和最大凸度maxConvexity转换成字符串表示,并追加到s中String inf = static_cast<const ostringstream&>(ostringstream() << pAct.minConvexity).str();String sup = static_cast<const ostringstream&>(ostringstream() << pAct.maxConvexity).str();// 判断之前的描述文字s是否为空,如果为空则直接赋值,不为空则添加"AND"进行连接if (s.length() == 0)s = " Convexity range[" + inf + " to " + sup + "]";elses += " AND Convexity range[" + inf + " to " + sup + "]";}// 如果启用了惯性比过滤器filterByInertiaif (pAct.filterByInertia){// 将最小惯性比minInertiaRatio和最大惯性比maxInertiaRatio转换成字符串表示,并追加到s中String inf = static_cast<const ostringstream&>(ostringstream() << pAct.minInertiaRatio).str();String sup = static_cast<const ostringstream&>(ostringstream() << pAct.maxInertiaRatio).str();// 判断之前的描述文字s是否为空,如果为空则直接赋值,不为空则添加"AND"进行连接if (s.length() == 0)s = " Inertia ratio range [" + inf + " to " + sup + "]";elses += " AND Inertia ratio range [" + inf + " to " + sup + "]";}// 返回最终生成的Blob检测条件描述文字return s;
}// 主函数
int main(int argc, char *argv[])
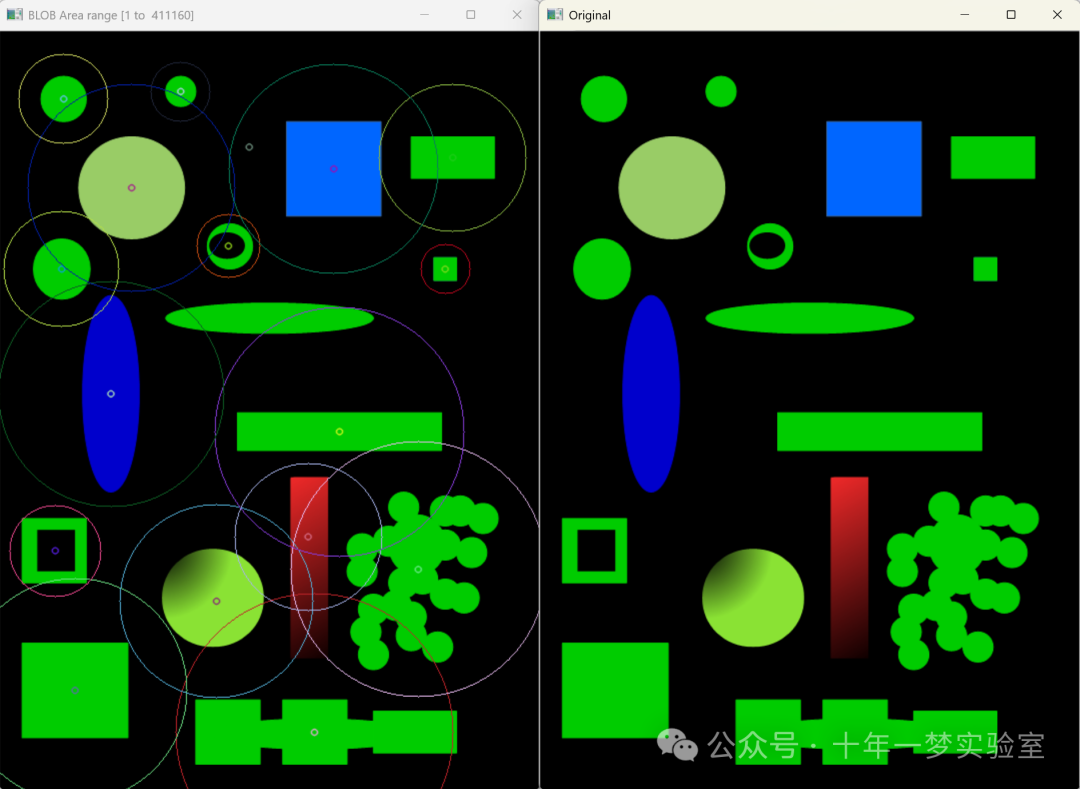
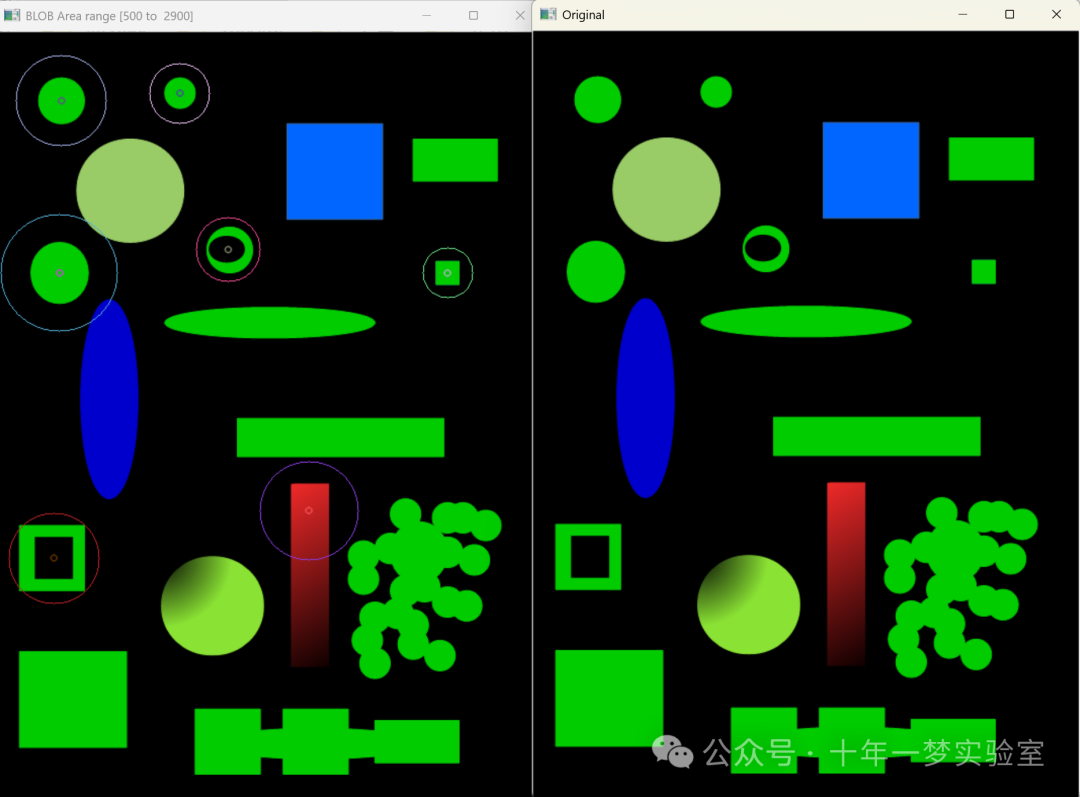
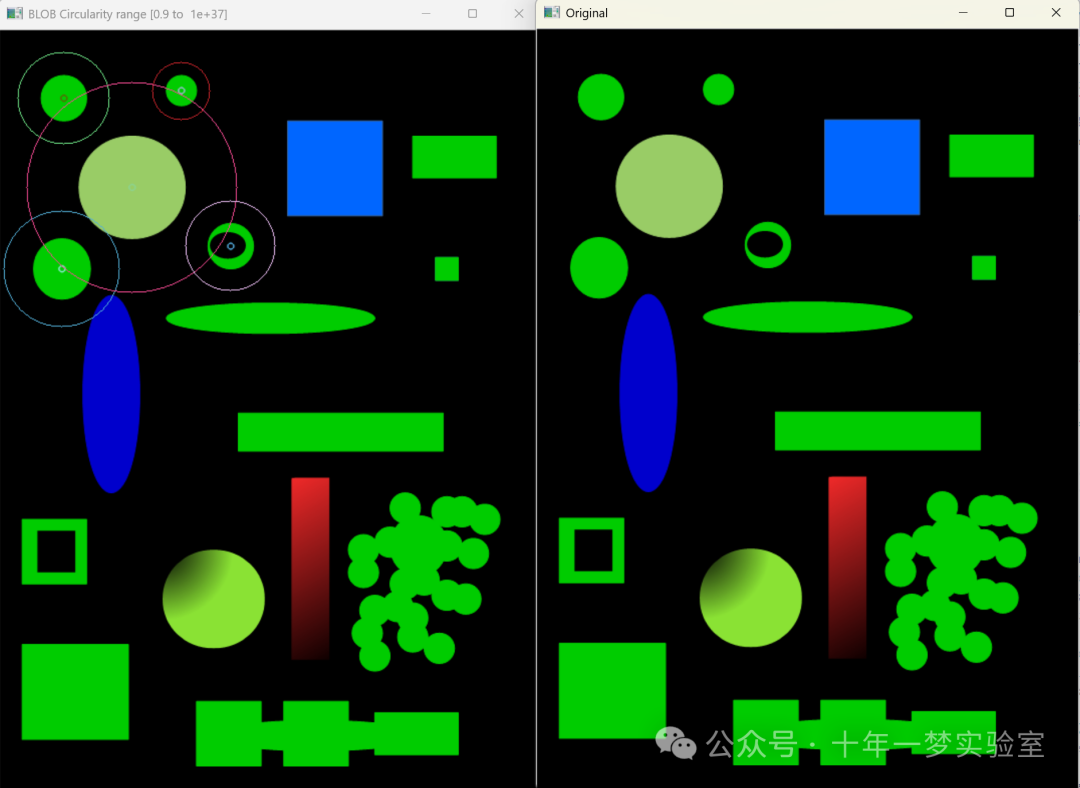
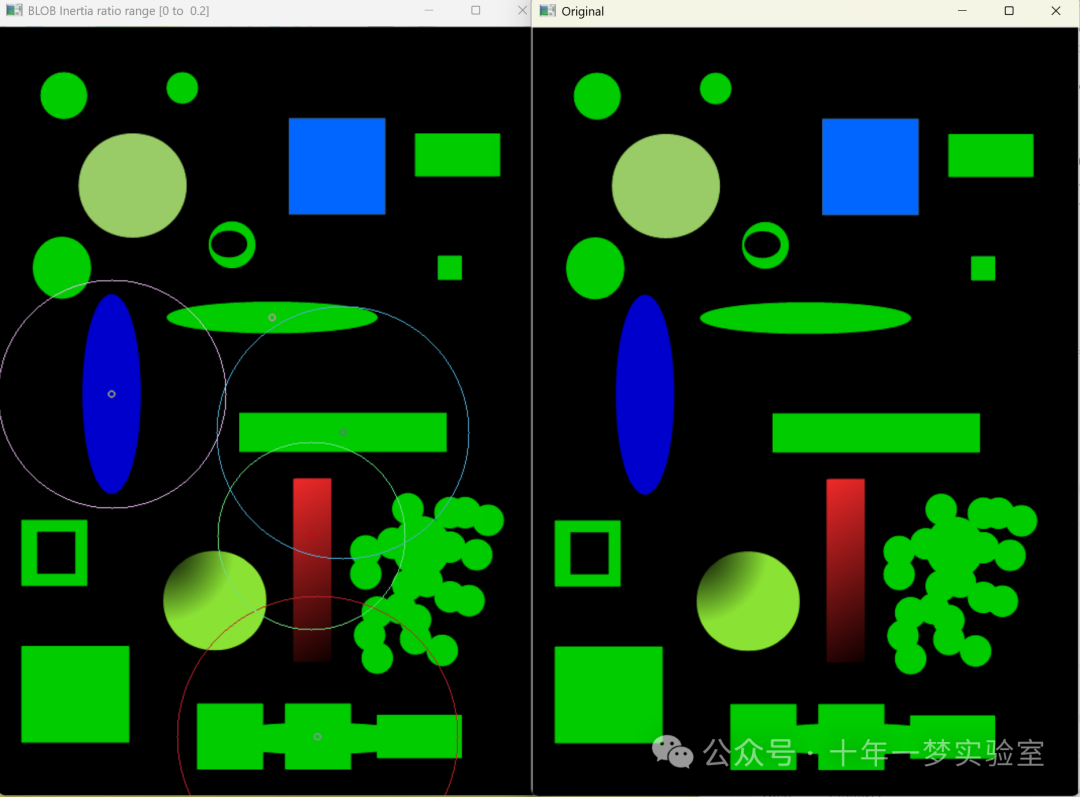
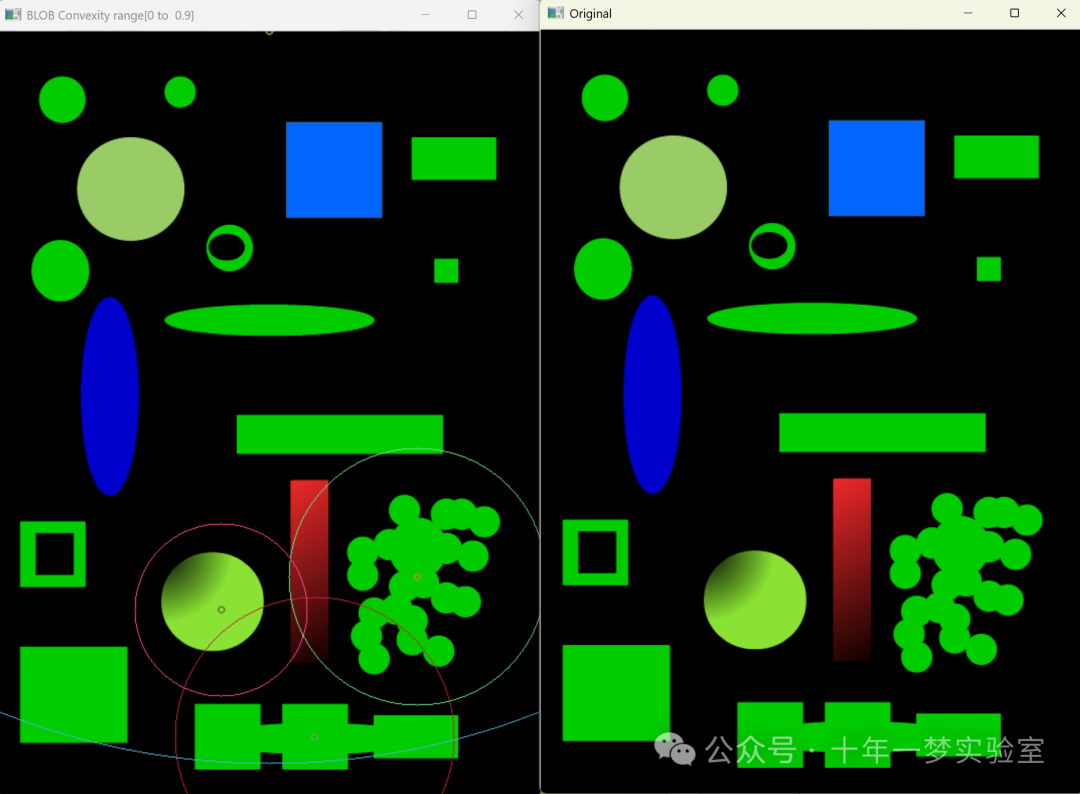
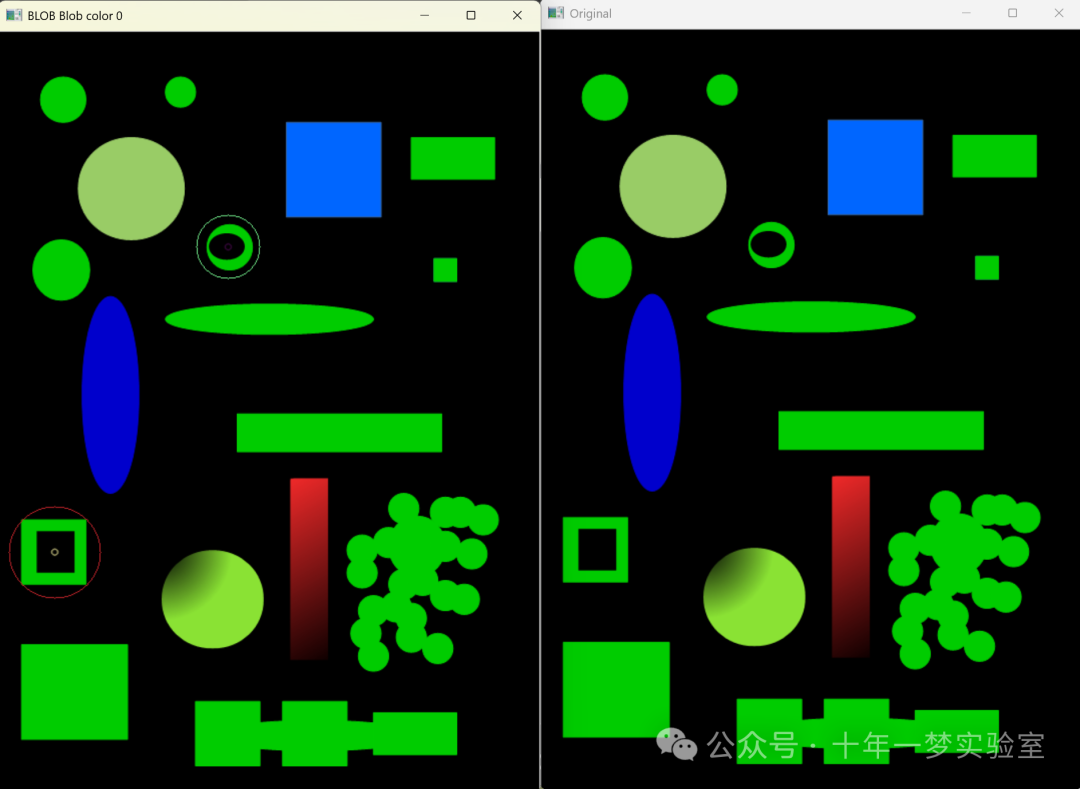
{// 用于存储读取的文件名String fileName;// 创建命令行解析器,用于处理通过命令行传入的参数cv::CommandLineParser parser(argc, argv, "{@input |detect_blob.png| }{h help | | }");// 如果有"-h"或"--help"参数,显示帮助信息后结束程序if (parser.has("h")){help(argv);return 0;}// 如果没有提供输入文件名参数,则使用默认的"detect_blob.png"fileName = parser.get<string>("@input");// 读取并存储图像Mat img = imread(samples::findFile(fileName), IMREAD_COLOR);// 如果读取失败或图像为空,则输出错误信息并结束程序if (img.empty()){cout << "Image " << fileName << " is empty or cannot be found\n";return 1;}// 初始化SimpleBlobDetector的默认参数SimpleBlobDetector::Params pDefaultBLOB;// 设置默认的BLOB检测器的参数// 设置SimpleBlobDetector的阈值步长pDefaultBLOB.thresholdStep = 10;// 设置SimpleBlobDetector的最小阈值pDefaultBLOB.minThreshold = 10;// 设置SimpleBlobDetector的最大阈值pDefaultBLOB.maxThreshold = 220;// 设置SimpleBlobDetector的最小重复性pDefaultBLOB.minRepeatability = 2;// 设置SimpleBlobDetector的BLOB之间的最小距离pDefaultBLOB.minDistBetweenBlobs = 10;pDefaultBLOB.filterByColor = false; // 不按颜色过滤pDefaultBLOB.blobColor = 0; // BLOB的默认颜色pDefaultBLOB.filterByArea = false; // 不按区域大小过滤pDefaultBLOB.minArea = 25; // 最小区域大小pDefaultBLOB.maxArea = 5000; // 最大区域大小pDefaultBLOB.filterByCircularity = false; // 不按圆度过滤pDefaultBLOB.minCircularity = 0.9f; // 最小圆度pDefaultBLOB.maxCircularity = (float)1e37; // 设置一个非常大的数,代表无上限pDefaultBLOB.filterByInertia = false; // 不按惯性比过滤pDefaultBLOB.minInertiaRatio = 0.1f; // 最小惯性比pDefaultBLOB.maxInertiaRatio = (float)1e37; // 设置一个非常大的数,代表无上限pDefaultBLOB.filterByConvexity = false; // 不按凸度过滤pDefaultBLOB.minConvexity = 0.95f; // 最小凸度pDefaultBLOB.maxConvexity = (float)1e37; // 设置一个非常大的数,代表无上限// 存储BLOB类型描述符的字符串向量vector<String> typeDesc;// 存储不同BLOB参数的向量vector<SimpleBlobDetector::Params> pBLOB;// BLOB参数向量的迭代器vector<SimpleBlobDetector::Params>::iterator itBLOB;// 初始化一个颜色调色板,用于给不同的BLOB着色vector< Vec3b > palette;// 随机生成调色板中的颜色for (int i = 0; i<65536; i++){uchar c1 = (uchar)rand();uchar c2 = (uchar)rand();uchar c3 = (uchar)rand();palette.push_back(Vec3b(c1, c2, c3));}// 调用help函数显示帮助信息help(argv);// 下面代码将创建不同参数的BLOB检测器,并显示它们的结果// 配置六种不同参数的BLOB检测器// 例如,第一个检测器我们要检测所有BLOB// 对每种类型描述符进行初始化,然后按不同的过滤条件修改参数// 将"BLOB"类型推入描述符类型向量typeDesc.push_back("BLOB"); // 参见OpenCV官方文档SimpleBlobDetector类的描述pBLOB.push_back(pDefaultBLOB); // 将默认BLOB参数推入参数向量pBLOB.back().filterByArea = true; // 启用面积过滤pBLOB.back().minArea = 1; // 设置筛选的最小面积pBLOB.back().maxArea = float(img.rows * img.cols); // 设置筛选的最大面积为图像的总面积// 第二个BLOB检测器的参数设置:要求检测面积在500到2900像素之间的区域typeDesc.push_back("BLOB"); // 类型描述符追加"BLOB"pBLOB.push_back(pDefaultBLOB); // 使用默认参数作为基础pBLOB.back().filterByArea = true; // 启用面积过滤pBLOB.back().minArea = 500; // 设置最小面积为500像素pBLOB.back().maxArea = 2900; // 设置最大面积为2900像素// 第三个BLOB检测器的参数设置:仅检测圆形物体typeDesc.push_back("BLOB"); // 类型描述符追加"BLOB"pBLOB.push_back(pDefaultBLOB); // 使用默认参数作为基础pBLOB.back().filterByCircularity = true; // 启用圆度过滤// 第四个BLOB检测器的参数设置:根据惯性比进行筛选typeDesc.push_back("BLOB"); // 类型描述符追加"BLOB"pBLOB.push_back(pDefaultBLOB); // 使用默认参数作为基础pBLOB.back().filterByInertia = true; // 启用惯性比过滤pBLOB.back().minInertiaRatio = 0; // 设置最小惯性比为0pBLOB.back().maxInertiaRatio = (float)0.2; // 设置最大惯性比为0.2// 第五个BLOB检测器的参数设置:根据凸度进行筛选typeDesc.push_back("BLOB"); // 类型描述符追加"BLOB"pBLOB.push_back(pDefaultBLOB); // 使用默认参数作为基础pBLOB.back().filterByConvexity = true; // 启用凸度过滤pBLOB.back().minConvexity = 0.; // 设置最小凸度为0pBLOB.back().maxConvexity = (float)0.9; // 设置最大凸度为0.9// 第六个BLOB检测器的参数设置:检测重心颜色为0的BLOBtypeDesc.push_back("BLOB"); // 类型描述符追加"BLOB"pBLOB.push_back(pDefaultBLOB); // 使用默认参数作为基础pBLOB.back().filterByColor = true; // 启用颜色过滤pBLOB.back().blobColor = 0; // 设置筛选的BLOB颜色为0// 迭代器指向BLOB参数向量的起始位置itBLOB = pBLOB.begin();// 存储比较结果的向量vector<double> desMethCmp;// 创建Feature2D的智能指针,用于后续的特征检测Ptr<Feature2D> b;// 用于存储文本标签String label;// 循环遍历所有类型描述符vector<String>::iterator itDesc;for (itDesc = typeDesc.begin(); itDesc != typeDesc.end(); ++itDesc){// 存储检测到的关键点vector<KeyPoint> keyImg1;// 对于BLOB类型描述符if (*itDesc == "BLOB"){b = SimpleBlobDetector::create(*itBLOB); // 创建BLOB检测器label = Legende(*itBLOB); // 生成描述字符串++itBLOB; // 移动到下一个参数集}// 错误处理try{// 存储检测到的关键点vector<KeyPoint> keyImg;vector<Rect> zone;vector<vector <Point> > region;// 创建用于描述的矩阵和结果显示的图像Mat desc, result(img.rows, img.cols, CV_8UC3);// 如果是SimpleBlobDetectorif (b.dynamicCast<SimpleBlobDetector>().get()){// 动态转换为SimpleBlobDetectorPtr<SimpleBlobDetector> sbd = b.dynamicCast<SimpleBlobDetector>();// 使用SimpleBlobDetector检测关键点sbd->detect(img, keyImg, Mat());// 绘制检测到的关键点drawKeypoints(img, keyImg, result);// 遍历关键点,并在结果图中用圆圈表示int i = 0;for (vector<KeyPoint>::iterator k = keyImg.begin(); k != keyImg.end(); ++k, ++i)circle(result, k->pt, (int)k->size, palette[i % 65536]);}// 创建窗口显示结果namedWindow(*itDesc + label, WINDOW_AUTOSIZE);imshow(*itDesc + label, result);// 显示原始图像imshow("Original", img);// 等待用户响应waitKey();}catch (const Exception& e){// 如果发生错误,则打印错误信息cout << "Feature : " << *itDesc << "\n";cout << e.msg << endl;}}// 程序正常退出return 0;
}这段代码是使用OpenCV库编写的C++源码,用于演示如何通过SimpleBlobDetector类检测图像中的BLOB(Binary Large Object,二进制大对象),并根据不同参数过滤和显示检测到的区域。BLOB主要用于分割图像中具有不同特性(如面积、颜色、凸性等)的连续区域。代码中包括Blob检测参数的配置、随机颜色调色板的生成、关键点检测、过滤条件的文字描述生成、图像的显示以及异常处理。通过更改SimpleBlobDetector的参数,用户可以筛选满足特定条件的图像区域,比如特定大小、形状或颜色的物体。
b.dynamicCast<SimpleBlobDetector>().get()



![[python] Numpy库用法(持续更新)](https://img-blog.csdnimg.cn/direct/48d12cbb283544aaa6ce837ef3dfb970.png)