本文中,第一部分概述了各种回归损失函数,当然也包括了今天的主角MPDIou。第二部分内容为在YOLOv9中使用MPDIou回归损失函数的方法。
1 回归损失函数(Bounding Box Regression Loss)
边界框回归损失计算的方法包括GIoU、DIoU、CIoU、EIoU和MPDIou等。
IOU_Loss(2016)-> GIOU_Loss(2019)-> DIOU_Loss(2020)-> CIOU_Loss(2020)-> EIoU (2022 ) -> MPDIou(2023 )
① IOU
IoU的计算是用预测框(A)和真实框(B)的交集除以二者的并集,IoU的值越高说明二者的重合程度就越高,意味着模型预测的越准确。其公式为:

② GIOU
论文官网地址:https://arxiv.org/pdf/1902.09630.pdf
除了考虑IoU(交并比)之外,GIoU还考虑了边界框之间的包含关系和空间分布。GIOU的计算方式可以见下图:

③ DIoU
论文官网地址:https://arxiv.org/pdf/1911.08287.pdf
DIOU能够直接最小化预测框和真实框的中心点距离加速收敛,但是Bounding box的回归还有一个重要的因素纵横比没有考虑。DIoU的计算方式可以见下图:

④ CIoU
DIoU的作者考虑到,在两个框中心点重合时,c与d的值都不变。所以此时需要引入框的宽高比,即CIOU。CIoU的计算方式见下图:

⑤ EIoU
论文官网地址:https://arxiv.org/pdf/2101.08158.pdf
EIoU考虑了预测边界框与真实边界框之间的预期相似度。只用于训练。EIoU_Loss的计算公式如下所示:

EIoU的计算方式理解见下图:

⑥ MPDIou
论文官网地址:https://arxiv.org/abs/2307.07662
MPDIoU损失,通过最小化预测边界框和真实边界框之间的左上和右下点距离,以更好地训练目标检测、字符级场景文本识别和实例分割的深度模型。
绿框表示真实边界框,红框表示预测边界框。具有不同边界框回归结果的两种情况,如下图所示:
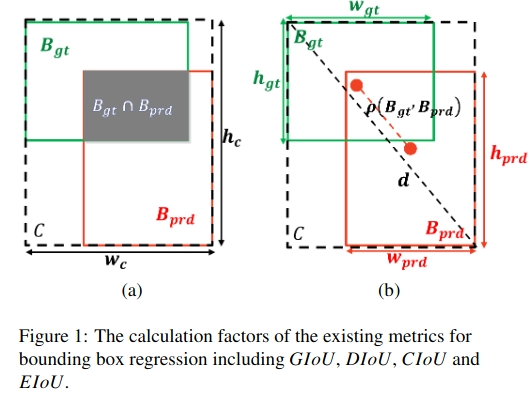
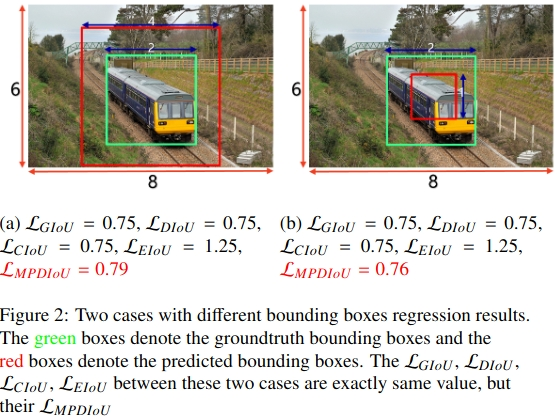
从上图中可以看出:其他的几种计算方法针对上图中的两种情况所得值均相同,只有MPDIou_Loss是不同的。
提出的MPDIoU简化了两个边界框之间的相似性比较,可以适应重叠或非重叠的边界框回归。
MPDIou的计算公式如下所示:

实验结果展示:


2 YOLOv9中使用MPDIou
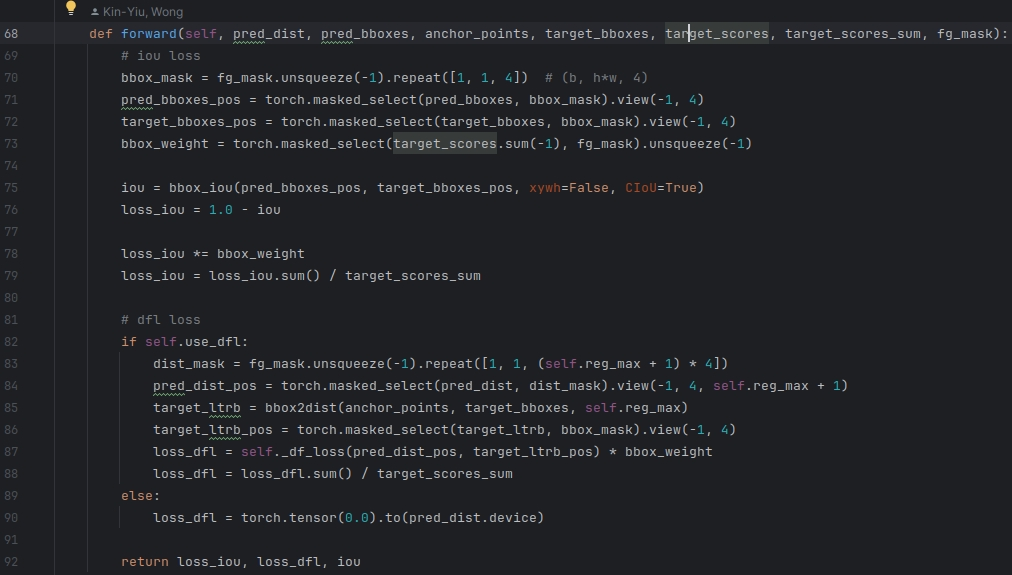
首先,我们看utils/metrics.py文件中的bbox_iou函数,如下图:
![]()
从上图中可以看出:官方代码中集成了MPDIoU,因此不需要修改损失函数的内部,只需要在使用的地方对应上额外需要的参数即可。

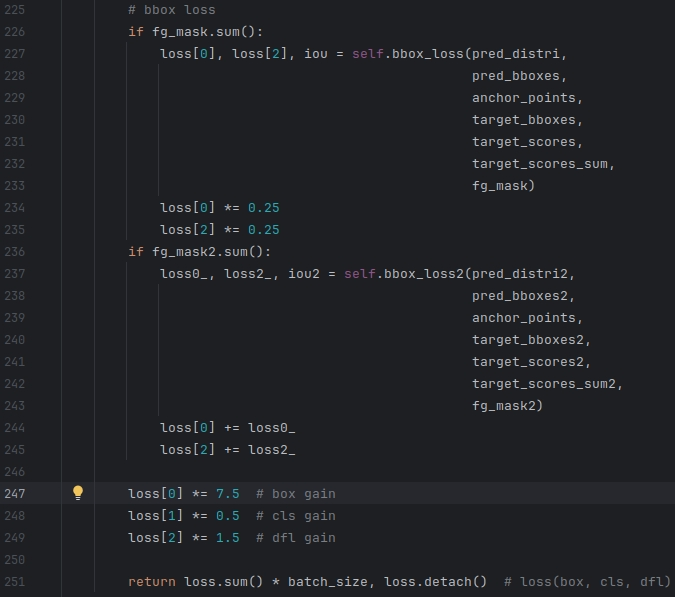
以下对YOLOv9的代码DualDetect版本进行具体的修改,修改的部分均在utils/loss_tal_dual.py文件中。
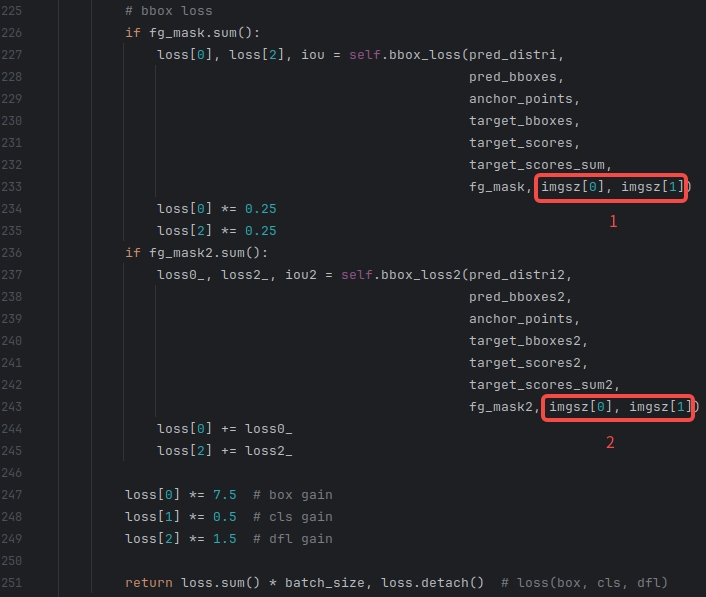
① 第一部分
| before |
|
|
| after |
|
|

② 第二部分
| before |
 |
| after |
 |
以上是全部的修改。本文也提供了修改后的loss_tal_dual.py,方便大家直接替换,内容如下:
import osimport torch
import torch.nn as nn
import torch.nn.functional as Ffrom utils.general import xywh2xyxy
from utils.metrics import bbox_iou
from utils.tal.anchor_generator import dist2bbox, make_anchors, bbox2dist
from utils.tal.assigner import TaskAlignedAssigner
from utils.torch_utils import de_paralleldef smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441# return positive, negative label smoothing BCE targetsreturn 1.0 - 0.5 * eps, 0.5 * epsclass VarifocalLoss(nn.Module):# Varifocal loss by Zhang et al. https://arxiv.org/abs/2008.13367def __init__(self):super().__init__()def forward(self, pred_score, gt_score, label, alpha=0.75, gamma=2.0):weight = alpha * pred_score.sigmoid().pow(gamma) * (1 - label) + gt_score * labelwith torch.cuda.amp.autocast(enabled=False):loss = (F.binary_cross_entropy_with_logits(pred_score.float(), gt_score.float(),reduction="none") * weight).sum()return lossclass FocalLoss(nn.Module):# Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):super().__init__()self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()self.gamma = gammaself.alpha = alphaself.reduction = loss_fcn.reductionself.loss_fcn.reduction = "none" # required to apply FL to each elementdef forward(self, pred, true):loss = self.loss_fcn(pred, true)# p_t = torch.exp(-loss)# loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability# TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.pypred_prob = torch.sigmoid(pred) # prob from logitsp_t = true * pred_prob + (1 - true) * (1 - pred_prob)alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)modulating_factor = (1.0 - p_t) ** self.gammaloss *= alpha_factor * modulating_factorif self.reduction == "mean":return loss.mean()elif self.reduction == "sum":return loss.sum()else: # 'none'return lossclass BboxLoss(nn.Module):def __init__(self, reg_max, use_dfl=False):super().__init__()self.reg_max = reg_maxself.use_dfl = use_dfldef forward(self, pred_dist, pred_bboxes, anchor_points, target_bboxes, target_scores, target_scores_sum, fg_mask, h, w):# iou lossbbox_mask = fg_mask.unsqueeze(-1).repeat([1, 1, 4]) # (b, h*w, 4)pred_bboxes_pos = torch.masked_select(pred_bboxes, bbox_mask).view(-1, 4)target_bboxes_pos = torch.masked_select(target_bboxes, bbox_mask).view(-1, 4)bbox_weight = torch.masked_select(target_scores.sum(-1), fg_mask).unsqueeze(-1)iou = bbox_iou(pred_bboxes_pos, target_bboxes_pos, xywh=False, CIoU=False, MDPIoU=True, feat_h=h, feat_w=w)loss_iou = 1.0 - iouloss_iou *= bbox_weightloss_iou = loss_iou.sum() / target_scores_sum# dfl lossif self.use_dfl:dist_mask = fg_mask.unsqueeze(-1).repeat([1, 1, (self.reg_max + 1) * 4])pred_dist_pos = torch.masked_select(pred_dist, dist_mask).view(-1, 4, self.reg_max + 1)target_ltrb = bbox2dist(anchor_points, target_bboxes, self.reg_max)target_ltrb_pos = torch.masked_select(target_ltrb, bbox_mask).view(-1, 4)loss_dfl = self._df_loss(pred_dist_pos, target_ltrb_pos) * bbox_weightloss_dfl = loss_dfl.sum() / target_scores_sumelse:loss_dfl = torch.tensor(0.0).to(pred_dist.device)return loss_iou, loss_dfl, ioudef _df_loss(self, pred_dist, target):target_left = target.to(torch.long)target_right = target_left + 1weight_left = target_right.to(torch.float) - targetweight_right = 1 - weight_leftloss_left = F.cross_entropy(pred_dist.view(-1, self.reg_max + 1), target_left.view(-1), reduction="none").view(target_left.shape) * weight_leftloss_right = F.cross_entropy(pred_dist.view(-1, self.reg_max + 1), target_right.view(-1),reduction="none").view(target_left.shape) * weight_rightreturn (loss_left + loss_right).mean(-1, keepdim=True)class ComputeLoss:# Compute lossesdef __init__(self, model, use_dfl=True):device = next(model.parameters()).device # get model deviceh = model.hyp # hyperparameters# Define criteriaBCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["cls_pw"]], device=device), reduction='none')# Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3self.cp, self.cn = smooth_BCE(eps=h.get("label_smoothing", 0.0)) # positive, negative BCE targets# Focal lossg = h["fl_gamma"] # focal loss gammaif g > 0:BCEcls = FocalLoss(BCEcls, g)m = de_parallel(model).model[-1] # Detect() moduleself.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7self.BCEcls = BCEclsself.hyp = hself.stride = m.stride # model stridesself.nc = m.nc # number of classesself.nl = m.nl # number of layersself.no = m.noself.reg_max = m.reg_maxself.device = deviceself.assigner = TaskAlignedAssigner(topk=int(os.getenv('YOLOM', 10)),num_classes=self.nc,alpha=float(os.getenv('YOLOA', 0.5)),beta=float(os.getenv('YOLOB', 6.0)))self.assigner2 = TaskAlignedAssigner(topk=int(os.getenv('YOLOM', 10)),num_classes=self.nc,alpha=float(os.getenv('YOLOA', 0.5)),beta=float(os.getenv('YOLOB', 6.0)))self.bbox_loss = BboxLoss(m.reg_max - 1, use_dfl=use_dfl).to(device)self.bbox_loss2 = BboxLoss(m.reg_max - 1, use_dfl=use_dfl).to(device)self.proj = torch.arange(m.reg_max).float().to(device) # / 120.0self.use_dfl = use_dfldef preprocess(self, targets, batch_size, scale_tensor):if targets.shape[0] == 0:out = torch.zeros(batch_size, 0, 5, device=self.device)else:i = targets[:, 0] # image index_, counts = i.unique(return_counts=True)out = torch.zeros(batch_size, counts.max(), 5, device=self.device)for j in range(batch_size):matches = i == jn = matches.sum()if n:out[j, :n] = targets[matches, 1:]out[..., 1:5] = xywh2xyxy(out[..., 1:5].mul_(scale_tensor))return outdef bbox_decode(self, anchor_points, pred_dist):if self.use_dfl:b, a, c = pred_dist.shape # batch, anchors, channelspred_dist = pred_dist.view(b, a, 4, c // 4).softmax(3).matmul(self.proj.type(pred_dist.dtype))# pred_dist = pred_dist.view(b, a, c // 4, 4).transpose(2,3).softmax(3).matmul(self.proj.type(pred_dist.dtype))# pred_dist = (pred_dist.view(b, a, c // 4, 4).softmax(2) * self.proj.type(pred_dist.dtype).view(1, 1, -1, 1)).sum(2)return dist2bbox(pred_dist, anchor_points, xywh=False)def __call__(self, p, targets, img=None, epoch=0):loss = torch.zeros(3, device=self.device) # box, cls, dflfeats = p[1][0] if isinstance(p, tuple) else p[0]feats2 = p[1][1] if isinstance(p, tuple) else p[1]pred_distri, pred_scores = torch.cat([xi.view(feats[0].shape[0], self.no, -1) for xi in feats], 2).split((self.reg_max * 4, self.nc), 1)pred_scores = pred_scores.permute(0, 2, 1).contiguous()pred_distri = pred_distri.permute(0, 2, 1).contiguous()pred_distri2, pred_scores2 = torch.cat([xi.view(feats2[0].shape[0], self.no, -1) for xi in feats2], 2).split((self.reg_max * 4, self.nc), 1)pred_scores2 = pred_scores2.permute(0, 2, 1).contiguous()pred_distri2 = pred_distri2.permute(0, 2, 1).contiguous()dtype = pred_scores.dtypebatch_size, grid_size = pred_scores.shape[:2]imgsz = torch.tensor(feats[0].shape[2:], device=self.device, dtype=dtype) * self.stride[0] # image size (h,w)anchor_points, stride_tensor = make_anchors(feats, self.stride, 0.5)# targetstargets = self.preprocess(targets, batch_size, scale_tensor=imgsz[[1, 0, 1, 0]])gt_labels, gt_bboxes = targets.split((1, 4), 2) # cls, xyxymask_gt = gt_bboxes.sum(2, keepdim=True).gt_(0)# pboxespred_bboxes = self.bbox_decode(anchor_points, pred_distri) # xyxy, (b, h*w, 4)pred_bboxes2 = self.bbox_decode(anchor_points, pred_distri2) # xyxy, (b, h*w, 4)target_labels, target_bboxes, target_scores, fg_mask = self.assigner(pred_scores.detach().sigmoid(),(pred_bboxes.detach() * stride_tensor).type(gt_bboxes.dtype),anchor_points * stride_tensor,gt_labels,gt_bboxes,mask_gt)target_labels2, target_bboxes2, target_scores2, fg_mask2 = self.assigner2(pred_scores2.detach().sigmoid(),(pred_bboxes2.detach() * stride_tensor).type(gt_bboxes.dtype),anchor_points * stride_tensor,gt_labels,gt_bboxes,mask_gt)target_bboxes /= stride_tensortarget_scores_sum = max(target_scores.sum(), 1)target_bboxes2 /= stride_tensortarget_scores_sum2 = max(target_scores2.sum(), 1)# cls loss# loss[1] = self.varifocal_loss(pred_scores, target_scores, target_labels) / target_scores_sum # VFL wayloss[1] = self.BCEcls(pred_scores, target_scores.to(dtype)).sum() / target_scores_sum # BCEloss[1] *= 0.25loss[1] += self.BCEcls(pred_scores2, target_scores2.to(dtype)).sum() / target_scores_sum2 # BCE# bbox lossif fg_mask.sum():loss[0], loss[2], iou = self.bbox_loss(pred_distri,pred_bboxes,anchor_points,target_bboxes,target_scores,target_scores_sum,fg_mask, imgsz[0], imgsz[1])loss[0] *= 0.25loss[2] *= 0.25if fg_mask2.sum():loss0_, loss2_, iou2 = self.bbox_loss2(pred_distri2,pred_bboxes2,anchor_points,target_bboxes2,target_scores2,target_scores_sum2,fg_mask2, imgsz[0], imgsz[1])loss[0] += loss0_loss[2] += loss2_loss[0] *= 7.5 # box gainloss[1] *= 0.5 # cls gainloss[2] *= 1.5 # dfl gainreturn loss.sum() * batch_size, loss.detach() # loss(box, cls, dfl)class ComputeLossLH:# Compute lossesdef __init__(self, model, use_dfl=True):device = next(model.parameters()).device # get model deviceh = model.hyp # hyperparameters# Define criteriaBCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["cls_pw"]], device=device), reduction='none')# Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3self.cp, self.cn = smooth_BCE(eps=h.get("label_smoothing", 0.0)) # positive, negative BCE targets# Focal lossg = h["fl_gamma"] # focal loss gammaif g > 0:BCEcls = FocalLoss(BCEcls, g)m = de_parallel(model).model[-1] # Detect() moduleself.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7self.BCEcls = BCEclsself.hyp = hself.stride = m.stride # model stridesself.nc = m.nc # number of classesself.nl = m.nl # number of layersself.no = m.noself.reg_max = m.reg_maxself.device = deviceself.assigner = TaskAlignedAssigner(topk=int(os.getenv('YOLOM', 10)),num_classes=self.nc,alpha=float(os.getenv('YOLOA', 0.5)),beta=float(os.getenv('YOLOB', 6.0)))self.bbox_loss = BboxLoss(m.reg_max - 1, use_dfl=use_dfl).to(device)self.proj = torch.arange(m.reg_max).float().to(device) # / 120.0self.use_dfl = use_dfldef preprocess(self, targets, batch_size, scale_tensor):if targets.shape[0] == 0:out = torch.zeros(batch_size, 0, 5, device=self.device)else:i = targets[:, 0] # image index_, counts = i.unique(return_counts=True)out = torch.zeros(batch_size, counts.max(), 5, device=self.device)for j in range(batch_size):matches = i == jn = matches.sum()if n:out[j, :n] = targets[matches, 1:]out[..., 1:5] = xywh2xyxy(out[..., 1:5].mul_(scale_tensor))return outdef bbox_decode(self, anchor_points, pred_dist):if self.use_dfl:b, a, c = pred_dist.shape # batch, anchors, channelspred_dist = pred_dist.view(b, a, 4, c // 4).softmax(3).matmul(self.proj.type(pred_dist.dtype))# pred_dist = pred_dist.view(b, a, c // 4, 4).transpose(2,3).softmax(3).matmul(self.proj.type(pred_dist.dtype))# pred_dist = (pred_dist.view(b, a, c // 4, 4).softmax(2) * self.proj.type(pred_dist.dtype).view(1, 1, -1, 1)).sum(2)return dist2bbox(pred_dist, anchor_points, xywh=False)def __call__(self, p, targets, img=None, epoch=0):loss = torch.zeros(3, device=self.device) # box, cls, dflfeats = p[1][0] if isinstance(p, tuple) else p[0]feats2 = p[1][1] if isinstance(p, tuple) else p[1]pred_distri, pred_scores = torch.cat([xi.view(feats[0].shape[0], self.no, -1) for xi in feats], 2).split((self.reg_max * 4, self.nc), 1)pred_scores = pred_scores.permute(0, 2, 1).contiguous()pred_distri = pred_distri.permute(0, 2, 1).contiguous()pred_distri2, pred_scores2 = torch.cat([xi.view(feats2[0].shape[0], self.no, -1) for xi in feats2], 2).split((self.reg_max * 4, self.nc), 1)pred_scores2 = pred_scores2.permute(0, 2, 1).contiguous()pred_distri2 = pred_distri2.permute(0, 2, 1).contiguous()dtype = pred_scores.dtypebatch_size, grid_size = pred_scores.shape[:2]imgsz = torch.tensor(feats[0].shape[2:], device=self.device, dtype=dtype) * self.stride[0] # image size (h,w)anchor_points, stride_tensor = make_anchors(feats, self.stride, 0.5)# targetstargets = self.preprocess(targets, batch_size, scale_tensor=imgsz[[1, 0, 1, 0]])gt_labels, gt_bboxes = targets.split((1, 4), 2) # cls, xyxymask_gt = gt_bboxes.sum(2, keepdim=True).gt_(0)# pboxespred_bboxes = self.bbox_decode(anchor_points, pred_distri) # xyxy, (b, h*w, 4)pred_bboxes2 = self.bbox_decode(anchor_points, pred_distri2) # xyxy, (b, h*w, 4)target_labels, target_bboxes, target_scores, fg_mask = self.assigner(pred_scores2.detach().sigmoid(),(pred_bboxes2.detach() * stride_tensor).type(gt_bboxes.dtype),anchor_points * stride_tensor,gt_labels,gt_bboxes,mask_gt)target_bboxes /= stride_tensortarget_scores_sum = target_scores.sum()# cls loss# loss[1] = self.varifocal_loss(pred_scores, target_scores, target_labels) / target_scores_sum # VFL wayloss[1] = self.BCEcls(pred_scores, target_scores.to(dtype)).sum() / target_scores_sum # BCEloss[1] *= 0.25loss[1] += self.BCEcls(pred_scores2, target_scores.to(dtype)).sum() / target_scores_sum # BCE# bbox lossif fg_mask.sum():loss[0], loss[2], iou = self.bbox_loss(pred_distri,pred_bboxes,anchor_points,target_bboxes,target_scores,target_scores_sum,fg_mask)loss[0] *= 0.25loss[2] *= 0.25if fg_mask.sum():loss0_, loss2_, iou2 = self.bbox_loss(pred_distri2,pred_bboxes2,anchor_points,target_bboxes,target_scores,target_scores_sum,fg_mask)loss[0] += loss0_loss[2] += loss2_loss[0] *= 7.5 # box gainloss[1] *= 0.5 # cls gainloss[2] *= 1.5 # dfl gainreturn loss.sum() * batch_size, loss.detach() # loss(box, cls, dfl)
修改之后,开始训练模型吧。
使用yolov9训练自己的数据集/验证 /推理 /参数分析 内容 点击即可跳转
训练示例命令
cd yolov9项目路径python3 train_dual.py --weights=yolov9-c.pt --cfg=models/detect/yolov9-c.yaml --data=data/fire.yaml --epoch=50 --batch-size=4 --imgsz=640 --hyp=data/hyps/hyp.scratch-high.yaml










![[python] Numpy库用法(持续更新)](https://img-blog.csdnimg.cn/direct/48d12cbb283544aaa6ce837ef3dfb970.png)

