一、前言
任何操作系统都需要提供一个时钟节拍,以供系统处理诸如延时,超时等与时间相关的事件。时钟节拍是特定的周期性中断, 这个中断可以看做是系统心跳。 中断之间的时间间隔取决于不同的应用,一般是 1ms – 100ms。时钟的节拍中断使得内核可以将任务延迟若干个时钟节拍,以及当任务等待事件发生时,提供等待超时等依据。时钟节拍率越快,系统的额外开销就越大。
对于 Cortex-M3 内核的 STM32F103 和 Cortex-M4 内核的 STM32F407 以及 F429,都是用滴答定时器来实现系统时钟节拍的。

宏定义配置表示系统时钟节拍是 1KHz,即 1ms。
二、FreeRTOS的时间管理
时间延迟函数主要由以下两个作用:
为周期性执行的任务提供延迟。
对于抢占式调度器,让高优先级任务可以通过时间延迟函数释放 CPU 使用权, 从而让低优先级任务可以得到执行。
1、函数 vTaskDelay 用于任务的延迟
void vTaskDelay(const TickType_t xTicksToDelay ); /* 延迟时间长度 */
参数 xTicksToDelay 用于设置延迟的时钟节拍个数,范围 1- 0xFFFFFFFF。

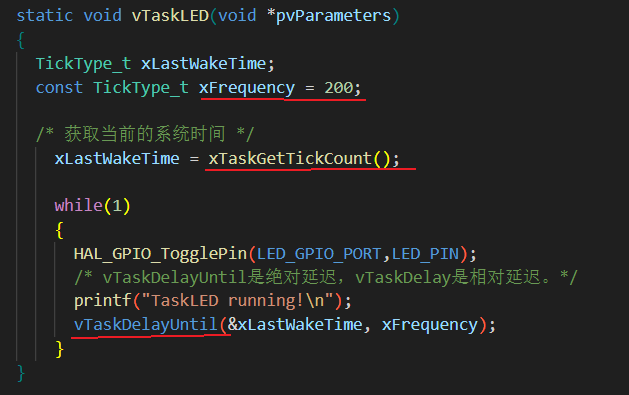
2、函数 vTaskDelayUntil 用于周期性延迟
void vTaskDelayUntil( TickType_t *pxPreviousWakeTime, /* 存储任务上次处于非阻塞状态时刻的变量地址 */const TickType_t xTimeIncrement ); /* 周期性延迟时间 */函数 vTaskDelay 和 vTaskDelayUntil 的区别:
函数 vTaskDelayUntil 实现的是周期性延迟,而函数 vTaskDelay 实现的是相对性延迟;
例如:有一个串口接收指令任务UsartRev,函数处理时间大概2ms,任务内分别Task1使用vTaskDelay延迟10ms或者Task2使用vTaskDelayUntil延迟10ms,不考虑任务被抢占而造成的影响。实际运行效果:
Task1: Tusartrev + Tvtaskdelay : 2ms + 10ms = 12ms 一个周期
Task2: Tusartrev + TvtaskDelayuntil : 10ms 一个周期(2ms 包含在10ms内)
3、函数 xTaskGetTickCount用于获取系统当前运行的时钟节拍数
TickType_t xTaskGetTickCount( void );任务里面调用。
4、函数 xTaskGetTickCountFromISR用于获取系统当前运行的时钟节拍数
TickType_t xTaskGetTickCountFromISR( void );
此函数用于在中断服务程序里面调用,如果在任务里面调用的话,需要使用函数 xTaskGetTickCount,这两个函数切不可混用。
三、测试例程
https://gitee.com/hutaooooooo/git_keil/tree/master/freetos_vTaskDelay
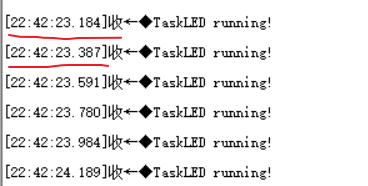
1、使用 vTaskDelayUntil 测试
2、使用vTaskDelay 实现 vTaskDelayUntil