LeetCode 226.翻转二叉树
1、题目
题目链接:226. 翻转二叉树
给你一棵二叉树的根节点 root ,翻转这棵二叉树,并返回其根节点。
示例 1:
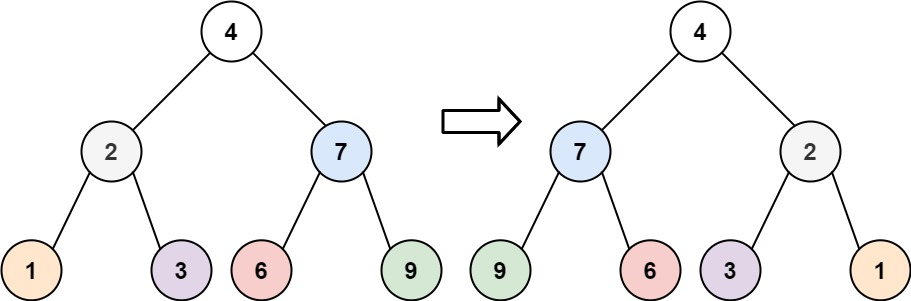
输入:root = [4,2,7,1,3,6,9]
输出:[4,7,2,9,6,3,1]
示例 2:
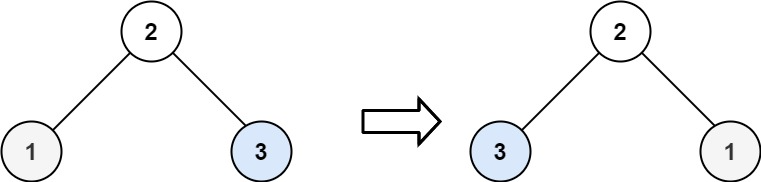
输入:root = [2,1,3]
输出:[2,3,1]
示例 3:
输入:root = []
输出:[]
提示:
- 树中节点数目范围在 [0, 100] 内
- -100 <= Node.val <= 100
2、递归(前序遍历)
思路
我们从根节点开始翻转,先交换左右孩子节点,然后翻转左子树,最后翻转右子树。即可完成以 root 为根节点的整棵子树的翻转。
代码
#include <iostream>using namespace std;//Definition for a binary tree node.
struct TreeNode {int val;TreeNode *left;TreeNode *right;TreeNode() : val(0), left(nullptr), right(nullptr) {}TreeNode(int x) : val(x), left(nullptr), right(nullptr) {}TreeNode(int x, TreeNode *left, TreeNode *right) : val(x), left(left), right(right) {}
};class Solution {public:TreeNode* invertTree(TreeNode* root) {// 如果根节点为空,则返回空指针if (root == nullptr) {return nullptr;}// 交换左右子树swap(root->left, root->right);// 递归翻转左子树invertTree(root->left);// 递归翻转右子树invertTree(root->right);// 返回翻转后的根节点return root;}
};int main() {TreeNode* root = new TreeNode(4, new TreeNode(2, new TreeNode(1), new TreeNode(3)), new TreeNode(7, new TreeNode(6), new TreeNode(9)));Solution s;TreeNode* res = s.invertTree(root);cout << res->val << endl;cout << res->left->val << endl;cout << res->right->val << endl;cout << res->left->left->val << endl;cout << res->left->right->val << endl;cout << res->right->left->val << endl;cout << res->right->right->val << endl;delete root;return 0;
}
复杂度分析
- 时间复杂度:O(N),其中 N 为二叉树节点的数目。我们会遍历二叉树中的每一个节点,对每个节点而言,我们在常数时间内交换其两棵子树。
- 空间复杂度:O(N)。使用的空间由递归栈的深度决定,它等于当前节点在二叉树中的高度。在平均情况下,二叉树的高度与节点个数为对数关系,即 O(logN)。而在最坏情况下,树形成链状,空间复杂度为 O(N)。
3、递归(中序遍历)
思路
注意:写中序遍历的时候,不能仅仅只是将前序遍历的代码顺序调整一下。
因为在“中序遍历”的时候,左右子树已经交换过了,因此原来写 invertTree(root.right); 的地方,应该写作 invertTree(root.left);。
代码
class Solution {
public:TreeNode* invertTree(TreeNode* root) {// 如果根节点为空,则返回空指针if (root == nullptr) {return nullptr;}// 递归翻转左子树invertTree(root->left);// 交换左右子树swap(root->left, root->right);// 递归翻转右子树invertTree(root->left);// 返回反转后的根节点return root;}
};
复杂度分析
- 时间复杂度:O(N),其中 N 为二叉树节点的数目。我们会遍历二叉树中的每一个节点,对每个节点而言,我们在常数时间内交换其两棵子树。
- 空间复杂度:O(N)。使用的空间由递归栈的深度决定,它等于当前节点在二叉树中的高度。在平均情况下,二叉树的高度与节点个数为对数关系,即 O(logN)。而在最坏情况下,树形成链状,空间复杂度为 O(N)。
4、递归(后序遍历)
思路
我们从根节点开始,递归地对树进行遍历,并从叶子节点先开始翻转。如果当前遍历到的节点 root 的左右两棵子树都已经翻转,那么我们只需要交换两棵子树的位置,即可完成以 root 为根节点的整棵子树的翻转。
代码
class Solution {
public:TreeNode* invertTree(TreeNode* root) {// 如果根节点为空,则返回空指针if (root == nullptr) {return nullptr;}// 递归翻转左子树invertTree(root->left);// 递归翻转右子树invertTree(root->right);// 交换左右子树swap(root->left, root->right);// 返回反转后的根节点return root;}
};
复杂度分析
- 时间复杂度:O(N),其中 N 为二叉树节点的数目。我们会遍历二叉树中的每一个节点,对每个节点而言,我们在常数时间内交换其两棵子树。
- 空间复杂度:O(N)。使用的空间由递归栈的深度决定,它等于当前节点在二叉树中的高度。在平均情况下,二叉树的高度与节点个数为对数关系,即 O(logN)。而在最坏情况下,树形成链状,空间复杂度为 O(N)。
5、迭代法(前序遍历)
代码
class Solution {
// 迭代法(前序遍历):使用栈,先将根节点入栈,然后不断弹出栈顶节点,交换其左右子树,并将右子树、左子树入栈,直到栈为空
public:TreeNode* invertTree(TreeNode* root) {// 如果根节点为空,则直接返回空if (root == nullptr) return nullptr;// 创建一个栈,用于存储待处理的节点stack<TreeNode*> stk;// 将根节点入栈stk.push(root);// 当栈不为空时,循环处理栈中的节点while(!stk.empty()) {// 取出栈顶节点TreeNode* node = stk.top();// 将栈顶节点出栈stk.pop();// 交换当前节点的左右子树swap(node->left, node->right);// 如果当前节点的右子树不为空,则将右子树入栈if(node->right) stk.push(node->right);// 如果当前节点的左子树不为空,则将左子树入栈if(node->left) stk.push(node->left);}// 返回根节点return root;}
};
复杂度分析
- 时间复杂度:O(N),其中 N 为二叉树节点的数目。我们会遍历二叉树中的每一个节点,对每个节点而言,我们在常数时间内交换其两棵子树。
- 空间复杂度:O(N)。使用的空间由递归栈的深度决定,它等于当前节点在二叉树中的高度。在平均情况下,二叉树的高度与节点个数为对数关系,即 O(logN)。而在最坏情况下,树形成链状,空间复杂度为 O(N)。
6、迭代法(中序遍历)
代码
class Solution {
// 迭代法(中序遍历):使用栈,先将根节点入栈,然后不断弹出栈顶节点,交换其左右子树,并将右子树、左子树入栈,直到栈为空public:TreeNode* invertTree(TreeNode* root) {stack<TreeNode*> stk;if (root != nullptr) {stk.push(root);}while (!stk.empty()) {TreeNode* node = stk.top();if (node != nullptr) {stk.pop();// 将右子节点入栈if (node->right) {stk.push(node->right);}// 将当前节点再次入栈,用于后续交换左右子节点stk.push(node);stk.push(nullptr);// 将左子节点入栈if (node->left) {stk.push(node->left);}} else {stk.pop();// 取出需要交换的节点node = stk.top();stk.pop();// 交换左右子节点swap(node->left, node->right);}}return root;}
};
复杂度分析
- 时间复杂度:O(N),其中 N 为二叉树节点的数目。我们会遍历二叉树中的每一个节点,对每个节点而言,我们在常数时间内交换其两棵子树。
- 空间复杂度:O(N)。使用的空间由递归栈的深度决定,它等于当前节点在二叉树中的高度。在平均情况下,二叉树的高度与节点个数为对数关系,即 O(logN)。而在最坏情况下,树形成链状,空间复杂度为 O(N)。
7、迭代法(后序遍历)
代码
class Solution {
// 迭代法(后序遍历):使用栈,先将根节点入栈,然后不断弹出栈顶节点,并将右子树、左子树入栈,交换其左右子树,直到栈为空
public:TreeNode* invertTree(TreeNode* root) {// 如果根节点为空,则直接返回空if (root == nullptr) return nullptr;// 创建一个栈,用于存储待处理的节点stack<TreeNode*> stk;// 将根节点入栈stk.push(root);// 当栈不为空时,循环处理栈中的节点while(!stk.empty()) {// 取出栈顶节点TreeNode* node = stk.top();// 将栈顶节点出栈stk.pop();// 如果当前节点的右子树不为空,则将右子树入栈if(node->right) stk.push(node->right);// 如果当前节点的左子树不为空,则将左子树入栈if(node->left) stk.push(node->left);// 交换当前节点的左右子树swap(node->left, node->right);}// 返回根节点return root;}
};
复杂度分析
- 时间复杂度:O(N),其中 N 为二叉树节点的数目。我们会遍历二叉树中的每一个节点,对每个节点而言,我们在常数时间内交换其两棵子树。
- 空间复杂度:O(N)。使用的空间由递归栈的深度决定,它等于当前节点在二叉树中的高度。在平均情况下,二叉树的高度与节点个数为对数关系,即 O(logN)。而在最坏情况下,树形成链状,空间复杂度为 O(N)。
8、层序遍历(广度优先遍历)
思路
层序遍历也可以把每个节点的左右孩子都翻转一遍,我们可以使用队列,将根节点入队列,然后不断弹出队列头节点,交换其左右子树,并将右子树、左子树入队列,直到队列为空。
代码
class Solution {
// 层序遍历:使用队列,将根节点入队列,然后不断弹出队列头节点,交换其左右子树,并将右子树、左子树入队列,直到队列为空
public:TreeNode* invertTree(TreeNode* root) {// 创建一个队列用于存储待处理的节点queue<TreeNode*> que;// 如果根节点不为空,则将其加入队列if (root != nullptr) que.push(root);// 当队列不为空时,循环处理队列中的节点while (!que.empty()) {// 记录当前队列的大小int size = que.size();// 遍历当前队列中的所有节点for (int i = 0; i < size; i++) {// 取出队列中的节点TreeNode* node = que.front();// 将节点从队列中移除que.pop();// 交换节点的左右子树swap(node->left, node->right);// 如果节点的左子树不为空,则将其加入队列if (node->left) que.push(node->left);// 如果节点的右子树不为空,则将其加入队列if (node->right) que.push(node->right);}}// 返回处理后的根节点return root;}
};
复杂度分析
- 时间复杂度:O(N),其中 N 为二叉树节点的数目。我们会遍历二叉树中的每一个节点,对每个节点而言,我们在常数时间内交换其两棵子树。
- 空间复杂度:O(N)。使用的空间由递归栈的深度决定,它等于当前节点在二叉树中的高度。在平均情况下,二叉树的高度与节点个数为对数关系,即 O(logN)。而在最坏情况下,树形成链状,空间复杂度为 O(N)。

![[HNOI2003]激光炸弹](https://img-blog.csdnimg.cn/direct/4b9f37466d494471bfd12a444a93d721.png)







![[基础] Unity Shader:顶点着色器(vert)函数](https://img-blog.csdnimg.cn/direct/7a37aa91bbdd4ba78d23fe22cc4b6d4c.gif)