一.海康可见USB3.0工业面阵相机
海康usb相机需要去海康官网上下载对应系统的MVS客户端及SDK开发包
海康机器人-机器视觉-下载中心
选择Windows系统和unbtun(我是linux aarch64,所以选择了对应压缩包解压)

Windows系统
1.双击安装包进入安装界面,开始安装
2. 设置安装路径,并勾选所有端口
勾选后客户端才能对应接口的设备,安装结束后完成即可。

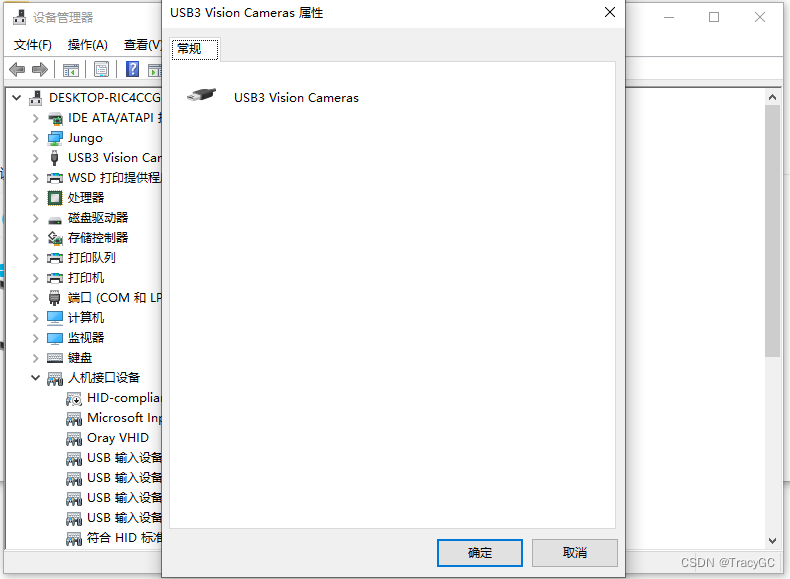
3.USB驱动检查
在windows系统自动检测新的硬件设备并且安装usb驱动。在设备管理器可以看到新增的usb设备,USB3 Vision Camera ,右键展开属性,就可以看出usb驱动是否安装正确。
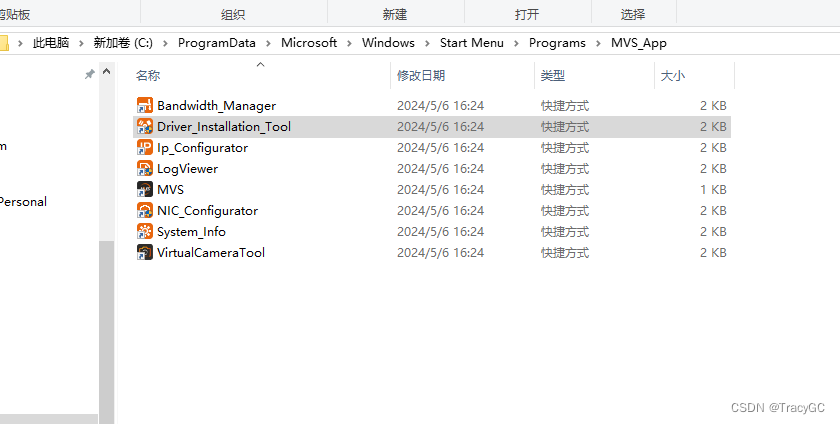
4.usb恢复异常驱动
如果usb驱动没有安装成功,那么就利用MVS文件子菜单里面吗的tools工具Driver Installation Tool,打开驱动工具,利用该工具卸载USB驱动或者重新安装
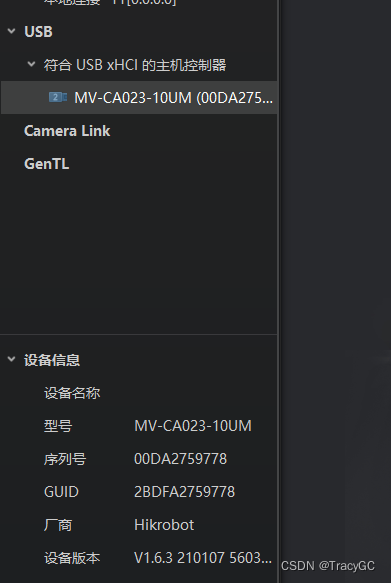
5.打开MVS客户端
设备列表会自动连接USB相机,双击该设备就可以成功连接,必要时通过设置或者调焦距可以变得清晰。

unbtun系统
1. 解压缩
tar –xzvf MVS-2.1.2_aarch64_20231116.tar.gz2.进入文件夹,利用管理员权限运行安装脚本
cd /home/nvidia/ssd/MVS-aarch64/MVS-2.1.2_aarch64_20231116/
sudo bash setup.sh
会显示安装成功!


完成后,/opt路径下会生成MVS文件夹
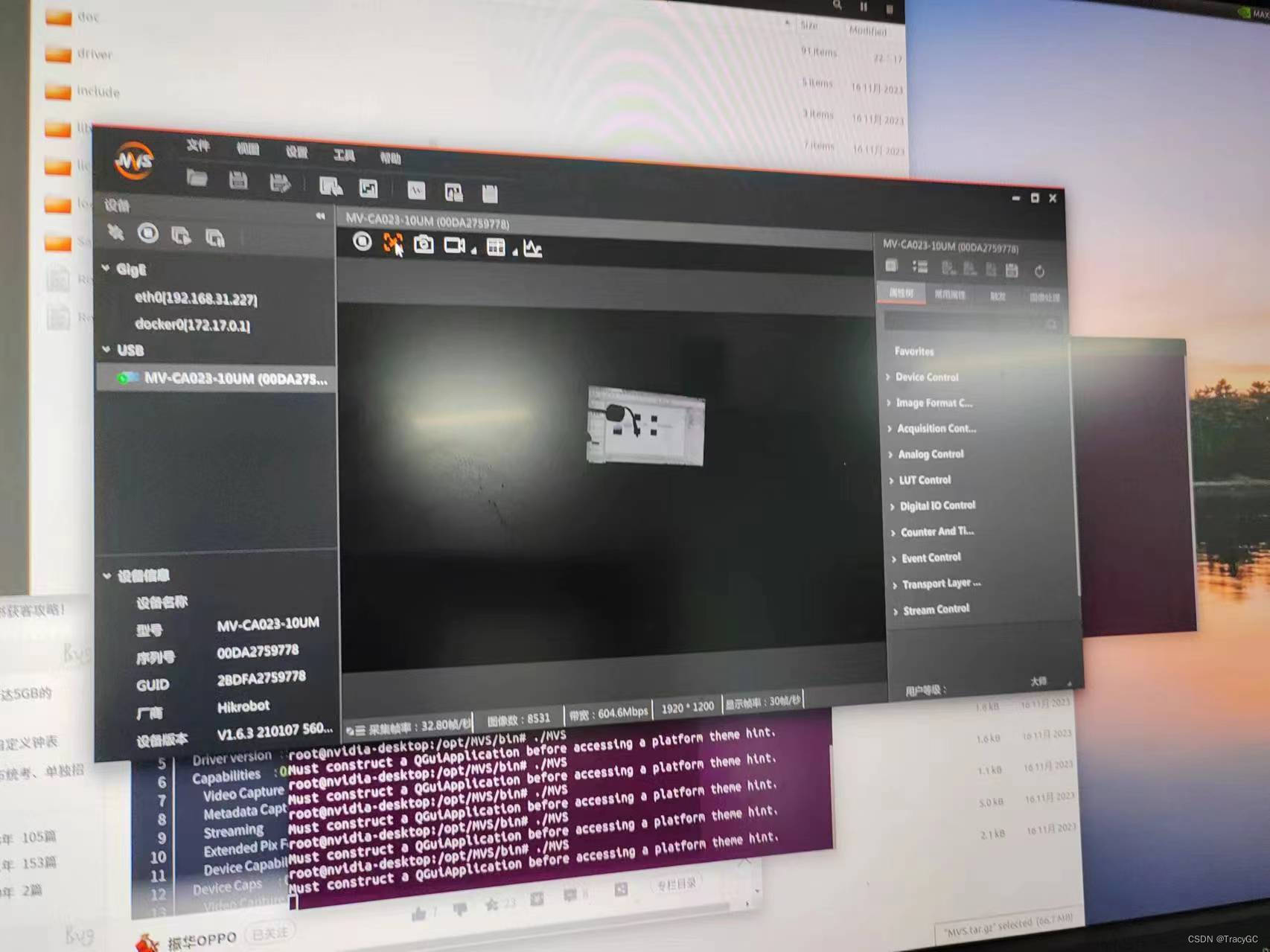
3.MVS运行--进入bin目录,运行MVS,即可打开客户端
cd /opt/MVS
ls
su # 进入管理员系统
cd bin/
./MVSls可以查看MVS下的系统文件:

打开MVS后也是连接usb摄像头:
4.示例程序运行
进入Samples目录下,可查看工业相机SDK提供的示例程序(C和Python)
cd /opt/MVs/Samples/64/
ls
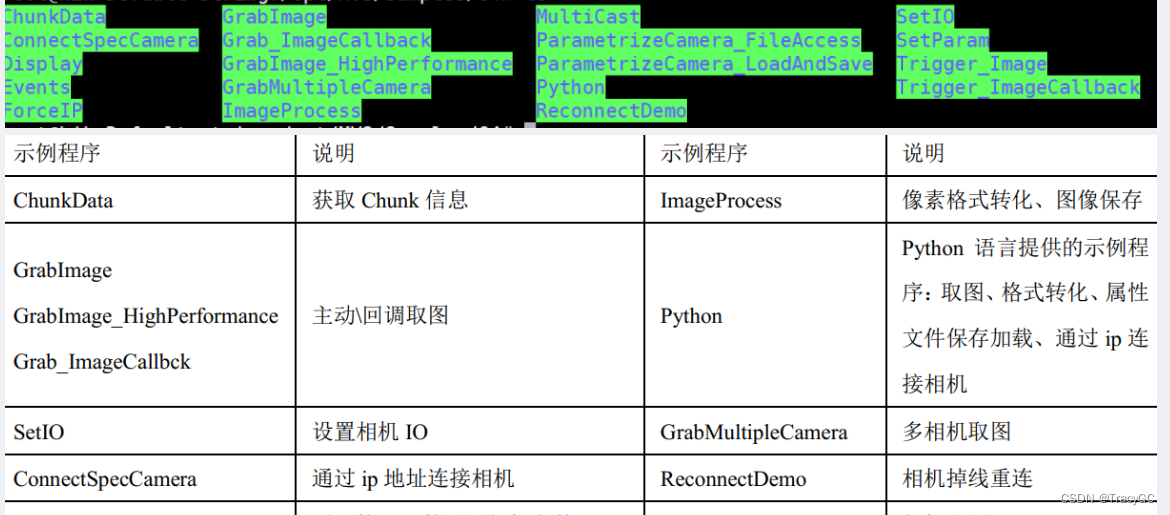
进入GrabImage文件夹,编译程序,运行程序
前面两行是C,后面两行是Python:
# C
cd /opt/Mvs/Samples/64/GrabImage
./GrabImage
# python
cd /opt/MVS/Samples/64/Python/GrabImage/
python3 GrabImage.py详细接口介绍,可参考doc文件夹下的SDK手册
二.Xcore MicroIIIS系列非制冷红外USB相机
Windows系统
1. 需要下载一个CameraController V106.exe软件
解压后安装提示安装,最后启动CameraController 应用程序
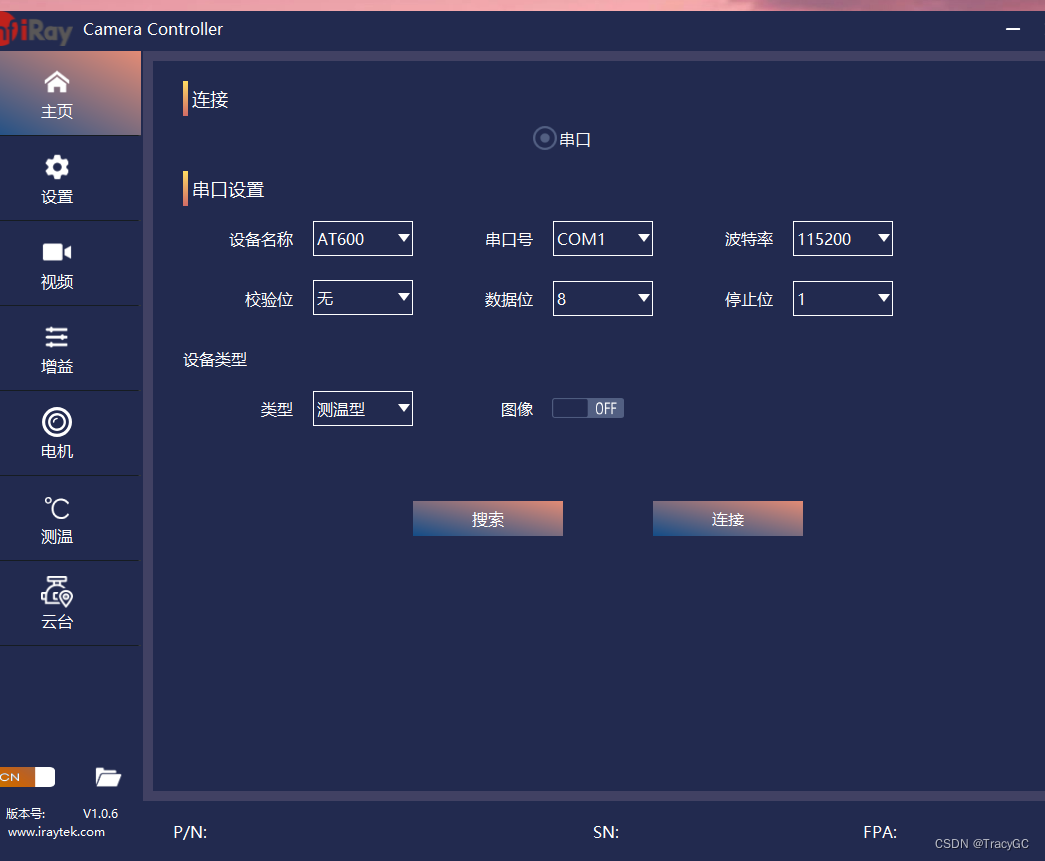
2. 串口设置,点击搜素,图像开关打开
默认选择 串口,点击搜素,图像开关OFF变ON打开
设备名称:机芯类型名称;串口号选择所需 COM 端口,我这里是COM3;
波特率 选 择产品支持的波特率(默认 115200)校验位 选择产品支持的校验方式(默认无校验);
数据位 默认为 8;停止位 默认为 1;类型:测温型、观测型
Unbtun系统
1. 识别usb摄像头设备
打开终端,输入命令:
ls /dev/video*
这里可以看到对应的usb,我是/dev/video0
2.命令行调出usb摄像头
以下用其中的一个即可。安装应用程序显示摄像头捕捉到的视频
1)使用应用程序camorama
输入命令:安装完成后,在终端中输入命令:camorama,即可显示出视频信息并指定打开video0
sudo apt-get install camorama
camorama
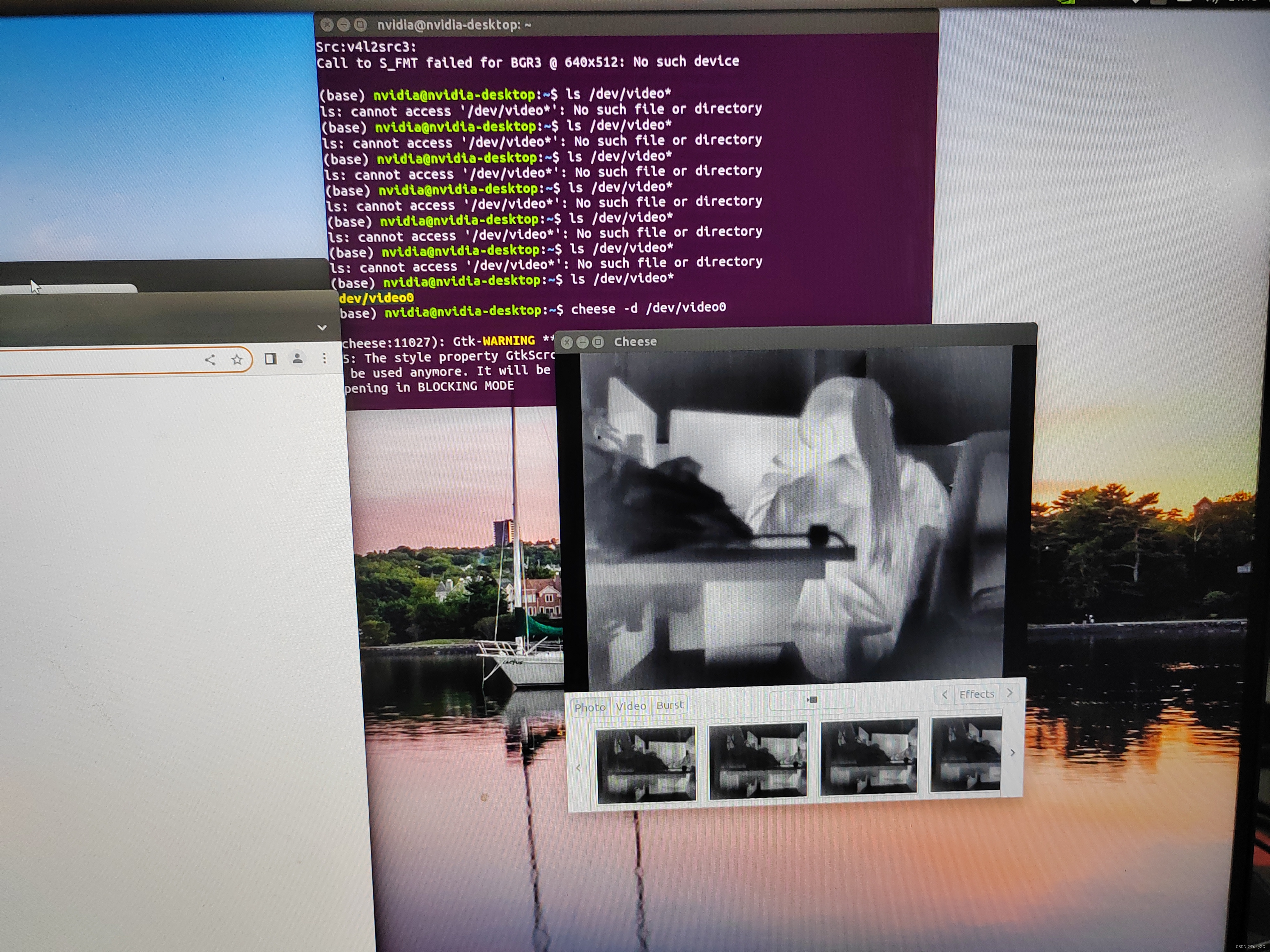
camorama -d /dev/video02)使用应用程序茄子(cheese)
输入命令:装好后,用命令:cheese,即可打开。如果指定打开video0,输入命令:
sudo apt-get install cheese
cheese
cheese -d /dev/video03.ubuntu下查看USB摄像头参数
在终端输入命令:这个是查看所有参数的命令.
v4l2-ctl -d /dev/video0 --all