任务:跑通lioslam
主要参考博客
IMU+激光雷达融合使用LIO-SAM建图学习笔记——详细、长文、多图、全流程_ubuntu_AIDE回归线-GitCode 开源社区 (csdn.net)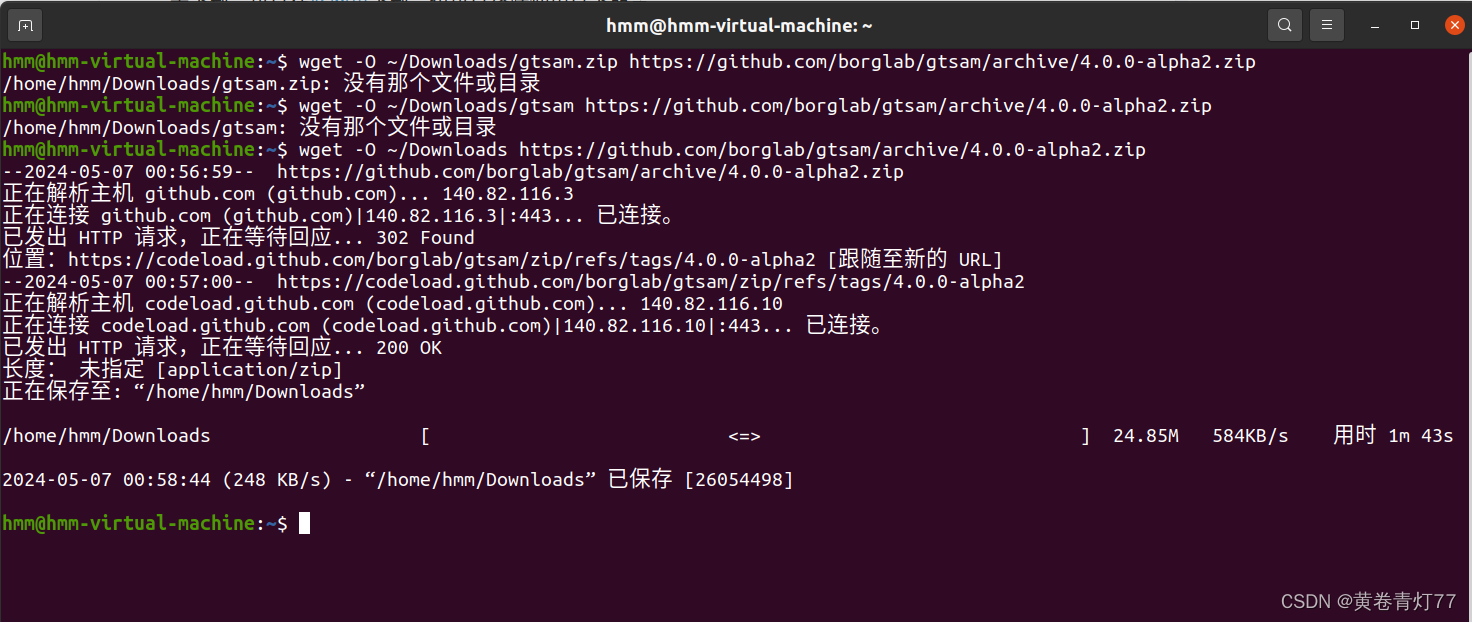
1.不要用这一句
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
用下面的
wget -O ~/Downloads https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
2.gtsam编译的时间很长 用时

编译过程中出现一大堆这种提示,不知道是干嘛的,一直弹这种东西出来,感觉有点问题


报了好多这种类型的错误,有关系吗?

没管 最后是跑通了暂时没遇到什么影响
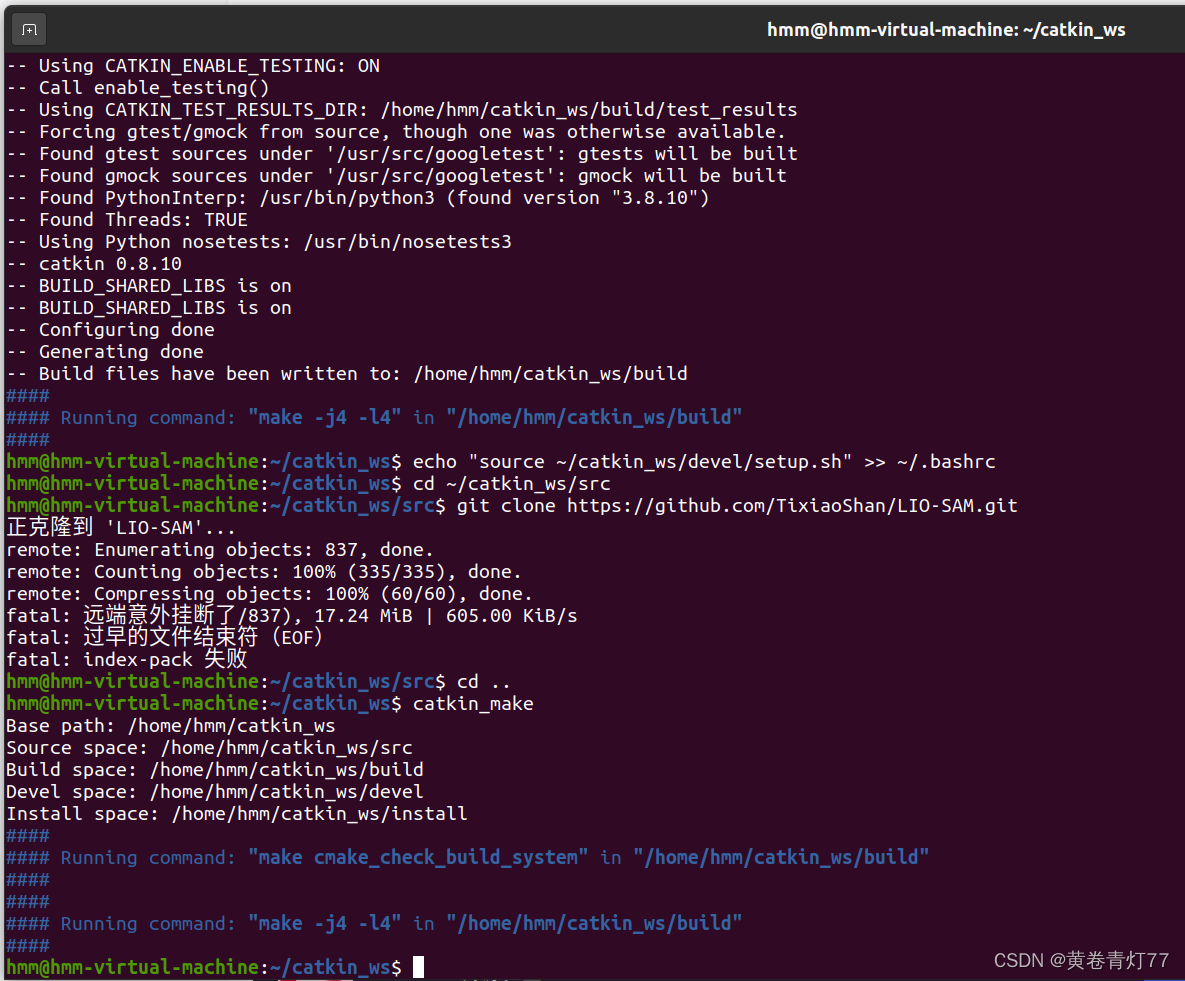
3.出现网络问题
4.卡在71%了了 昨天是卡在80%
问题:在make编译时,出现C++: fatal error:已杀死 signal terminated program cc1plus,
原因:内存不足
解决办法:
临时增加虚拟机内存方法;make过程中“fatal error ... cc1plus“_c语言_学书才浅-华为开发者联盟HarmonyOS专区

5.
ERROR: cannot launch node of type [robot_localization/ekf_localization_node]: robot_localization
解决办法
LIO-SAM:Ubuntu20.04下的编译与运行_lio-sam编译-CSDN博客
6.lioslam跑起来了 但是接受不到数据
要打开roscore
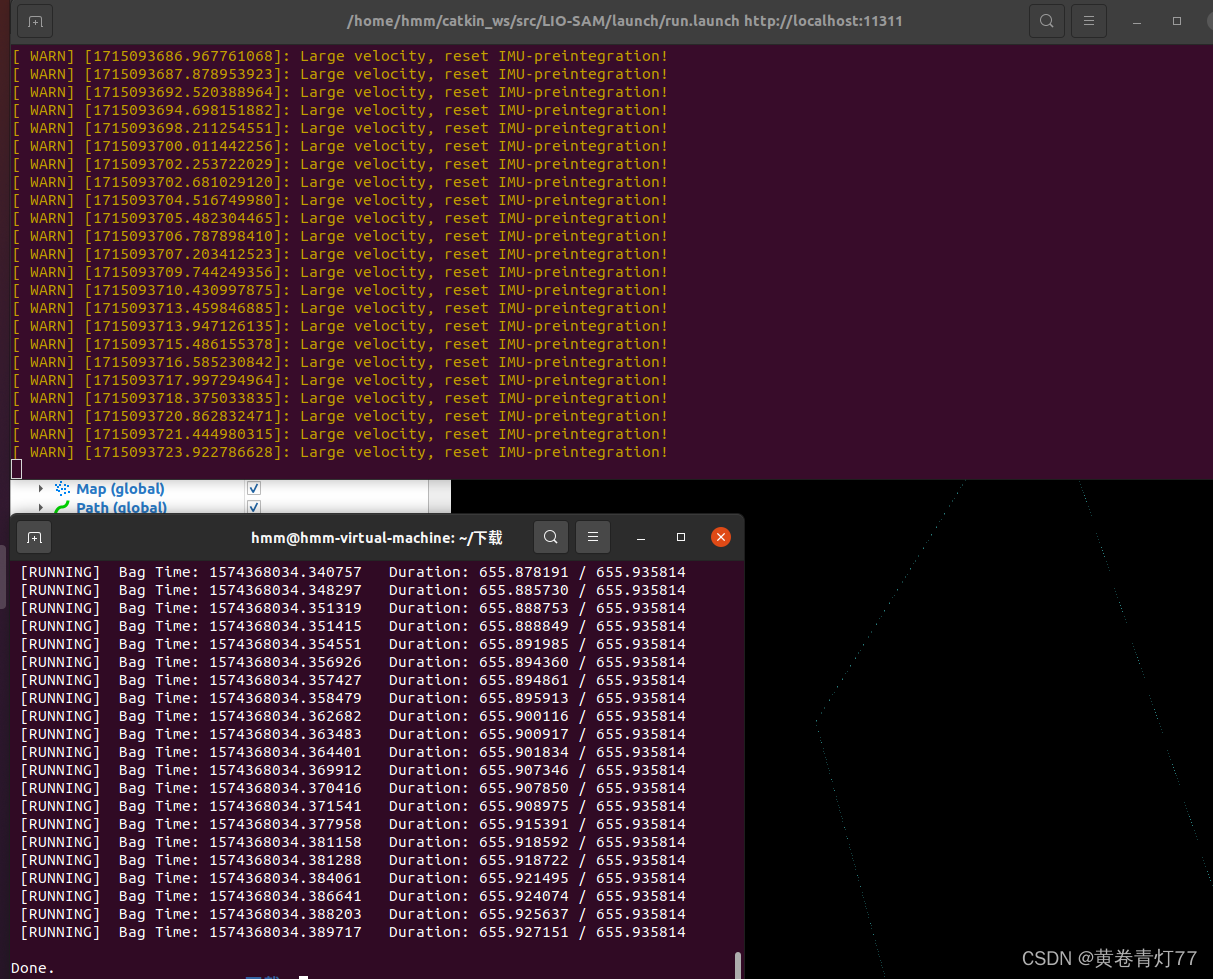
7.跑了655秒的数据,轨迹都飞到天上去了
告警 速度过大