- 参考文献
原Latex模版
\begin{thebibliography}{1}
\bibliographystyle{IEEEtran}\bibitem{ref1}
{\it{Mathematics Into Type}}. American Mathematical Society. [Online]. Available: https://www.ams.org/arc/styleguide/mit-2.pdf\bibitem{ref2}
T. W. Chaundy, P. R. Barrett and C. Batey, {\it{The Printing of Mathematics}}. London, U.K., Oxford Univ. Press, 1954.\bibitem{ref3}
F. Mittelbach and M. Goossens, {\it{The \LaTeX Companion}}, 2nd ed. Boston, MA, USA: Pearson, 2004.\bibitem{ref4}
G. Gr\"atzer, {\it{More Math Into LaTeX}}, New York, NY, USA: Springer, 2007.\bibitem{ref5}M. Letourneau and J. W. Sharp, {\it{AMS-StyleGuide-online.pdf,}} American Mathematical Society, Providence, RI, USA, [Online]. Available: http://www.ams.org/arc/styleguide/index.html\bibitem{ref6}
H. Sira-Ramirez, ``On the sliding mode control of nonlinear systems,'' \textit{Syst. Control Lett.}, vol. 19, pp. 303--312, 1992.\bibitem{ref7}
A. Levant, ``Exact differentiation of signals with unbounded higher derivatives,'' in \textit{Proc. 45th IEEE Conf. Decis.
Control}, San Diego, CA, USA, 2006, pp. 5585--5590. DOI: 10.1109/CDC.2006.377165.\bibitem{ref8}
M. Fliess, C. Join, and H. Sira-Ramirez, ``Non-linear estimation is easy,'' \textit{Int. J. Model., Ident. Control}, vol. 4, no. 1, pp. 12--27, 2008.\bibitem{ref9}
R. Ortega, A. Astolfi, G. Bastin, and H. Rodriguez, ``Stabilization of food-chain systems using a port-controlled Hamiltonian description,'' in \textit{Proc. Amer. Control Conf.}, Chicago, IL, USA,
2000, pp. 2245--2249.\end{thebibliography}
修改:创建bib文件,命名为refs.bib
打开谷歌学术

将内容复制到bib文件中

并在Latex文件后面写入
\bibliographystyle{IEEEtran}
\bibliography{refs}

2. 表格
推荐网站TableConvert
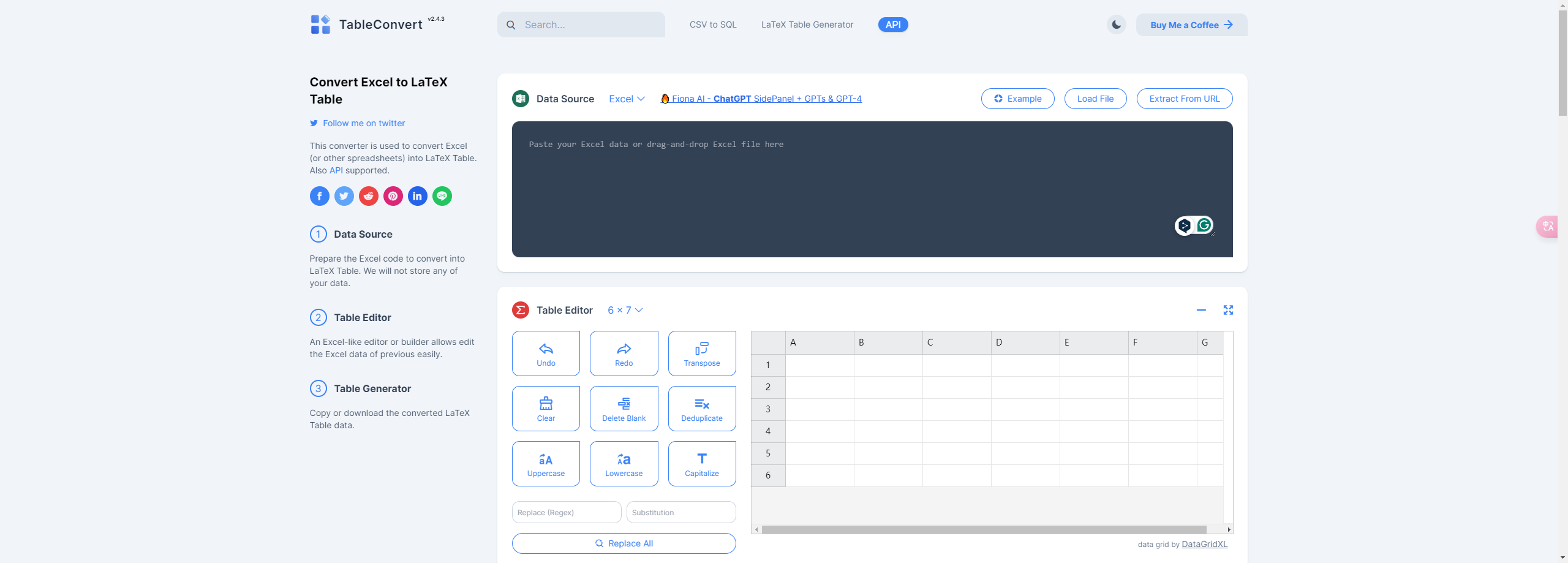
选择excel转latex
三线表需要删除|和\hline,自行删除
添加颜色
添加包
\usepackage{xcolor}
然后
{\textcolor[rgb]{0,0,1}{red}}
或者
{\color{red} 28.538}