【STM32F103】HC-SR04超声波测距
- 一、HC-SR04
- 1、工作原理
- 2、其他参数及时序图
- 二、代码编写思路
- 三、HAL配置
- 四、代码实现
- 五、实验结果
前言
本次实验主要实现用stm32f103+HC-SR04实现超声波测距,将测距数值通过串口上传到上位机串口助手
一、HC-SR04
1、工作原理
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声
波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
2、其他参数及时序图
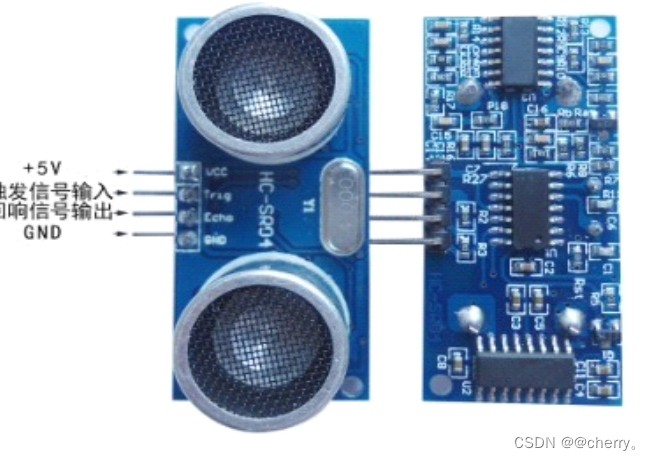
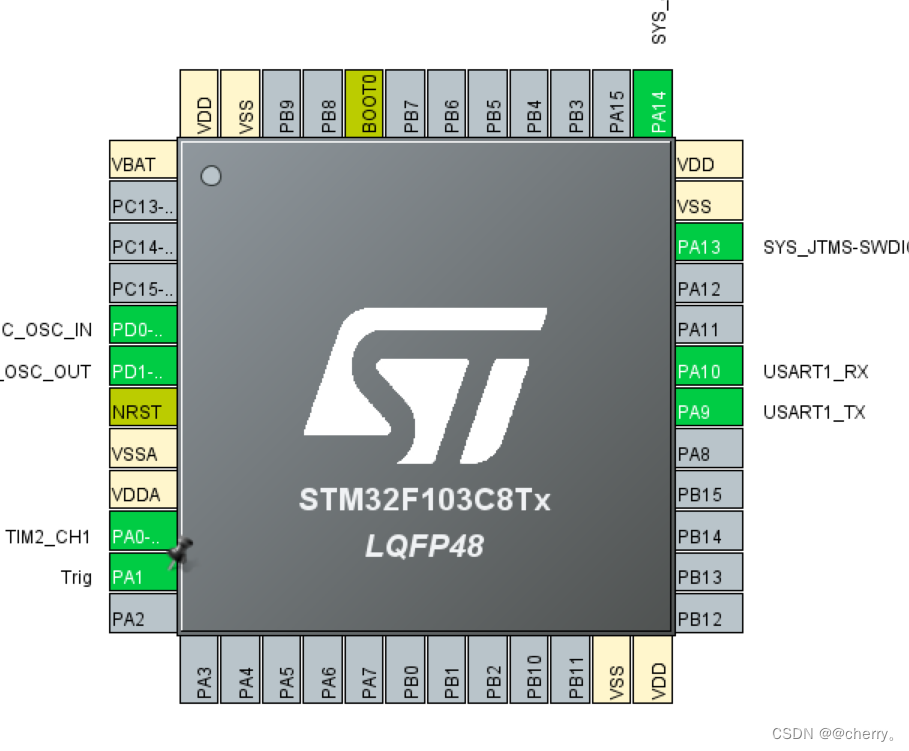
1、实物图及引脚信息
VCC 供 5V电源,GND 为地线,TRIG 触 发 控 制 信 号 输入,ECHO 回响信号输出
等四个接口端。
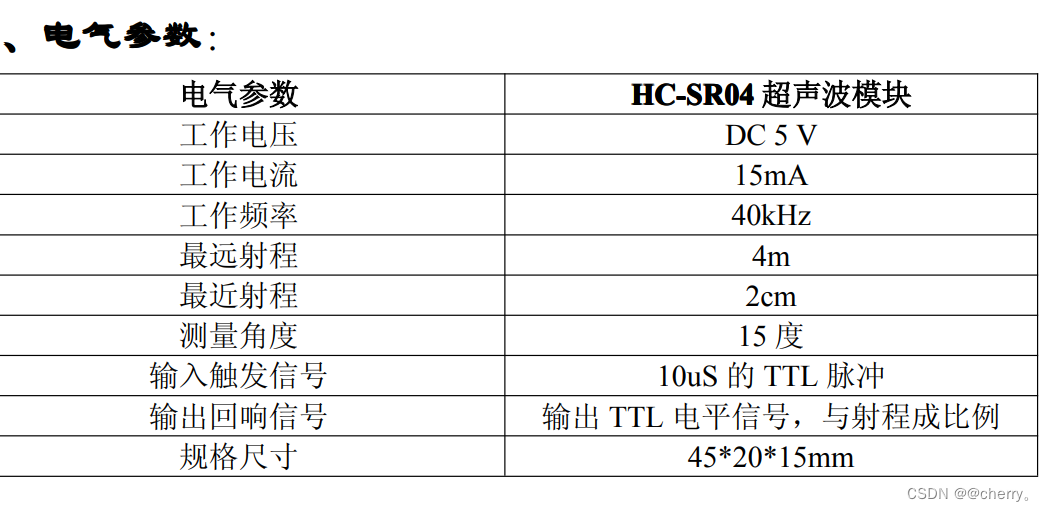
2、电气参数
3、超声波时序图:
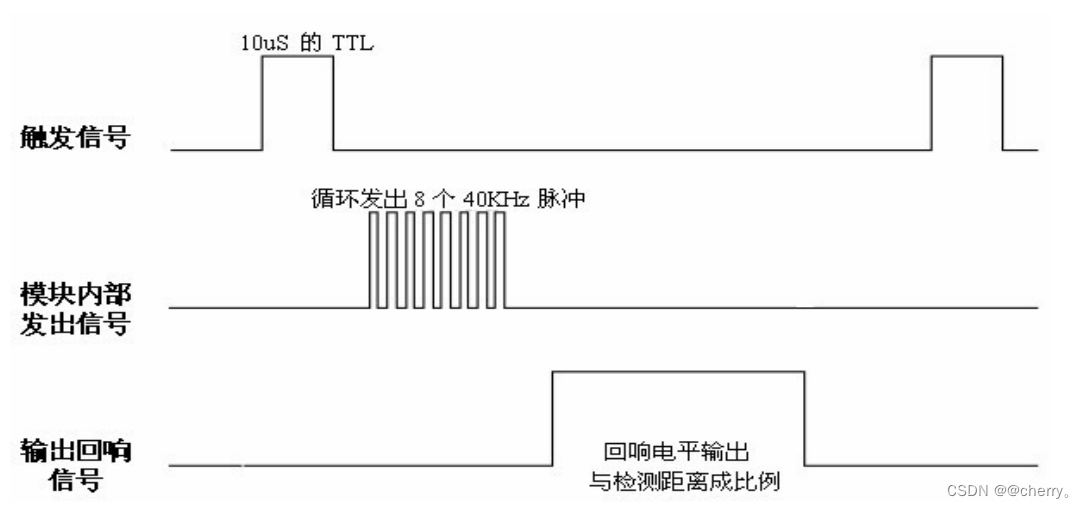
以上时序图表明你只需要提供一个 10uS 以上脉冲触发信号,该模块内部将
发出 8 个 40kHz 周期电平并检测回波。一旦检测到有回波信号则输出回响信号。
回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号
时间间隔可以计算得到距离。公式:uS/58=厘米或者 uS/148=英寸;或是:距离= 高电平时间*声速(340M/S)/2;建议测量周期为 60ms 以上,以防止发射信号对
回响信号的影响。(声速在0-100℃受温度影响较小,一般来说可以视作340m/s)
二、代码编写思路
1、我们仅需提供10us的高电平给Trig口即可。然后HC-SR04在测量完毕之后会将结果通过Echo回响回来。所以我们只需要将Trig口拉高,等待10us后再拉低即可。
2、接着就只需要等待Echo将数据传输回来,通过时序图我们可以得知回响信号是拉高Echo口,再拉低,中间持续的时间就是测距的结果。所以我们给Echo口配置一个中断事件,设置为上跳变下跳变都触发,另外再用一个变量记录Echo口到底是拉高还是拉低即可。
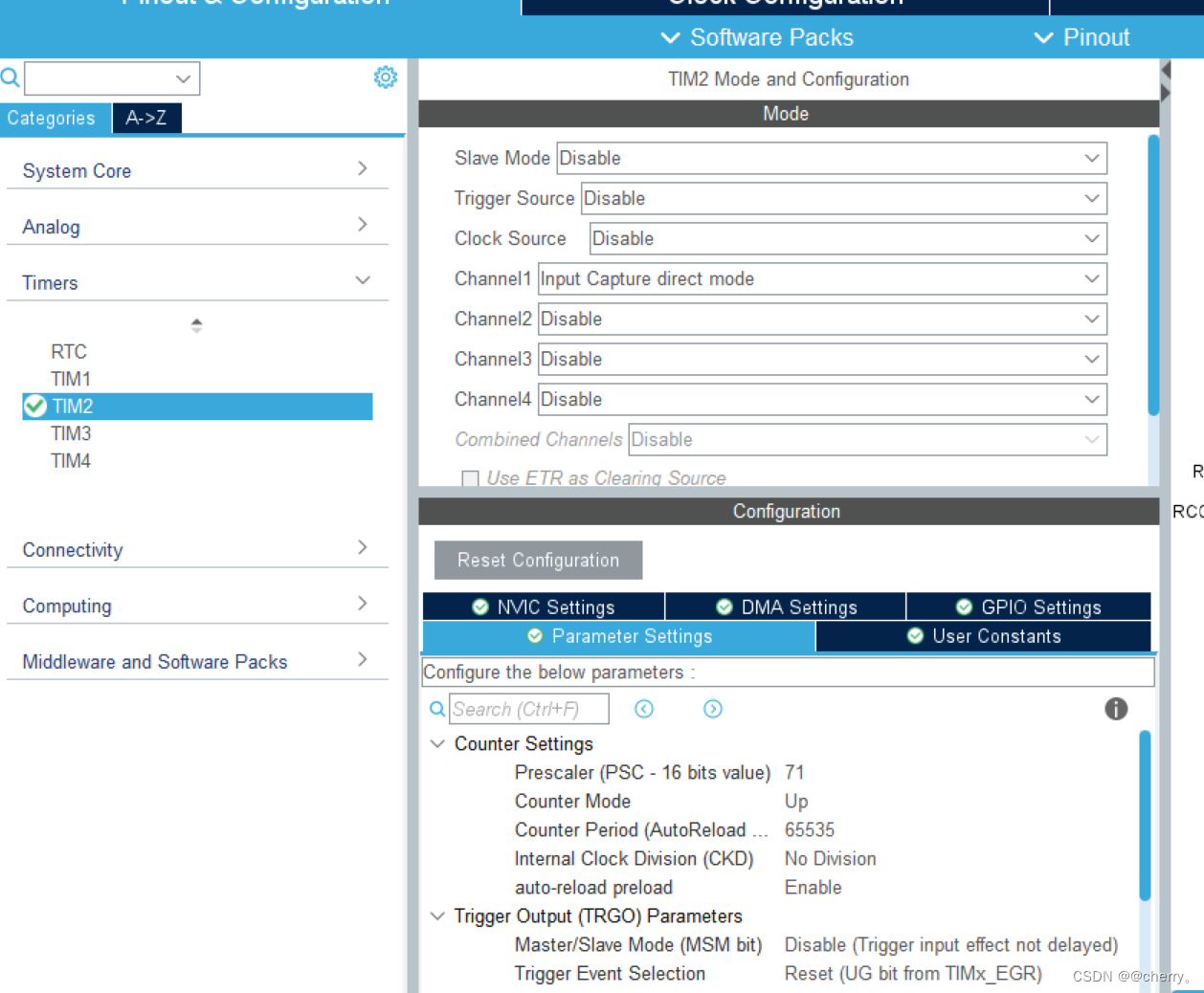
3、如果是拉高,那么我们需要记录下持续的时间,这时候我们需要用定时器计时,所以需要在一开始的时候就配置好定时器的初始化。唯一的问题就是该如何配置定时器的预分频器和自动重装器了。
三、HAL配置
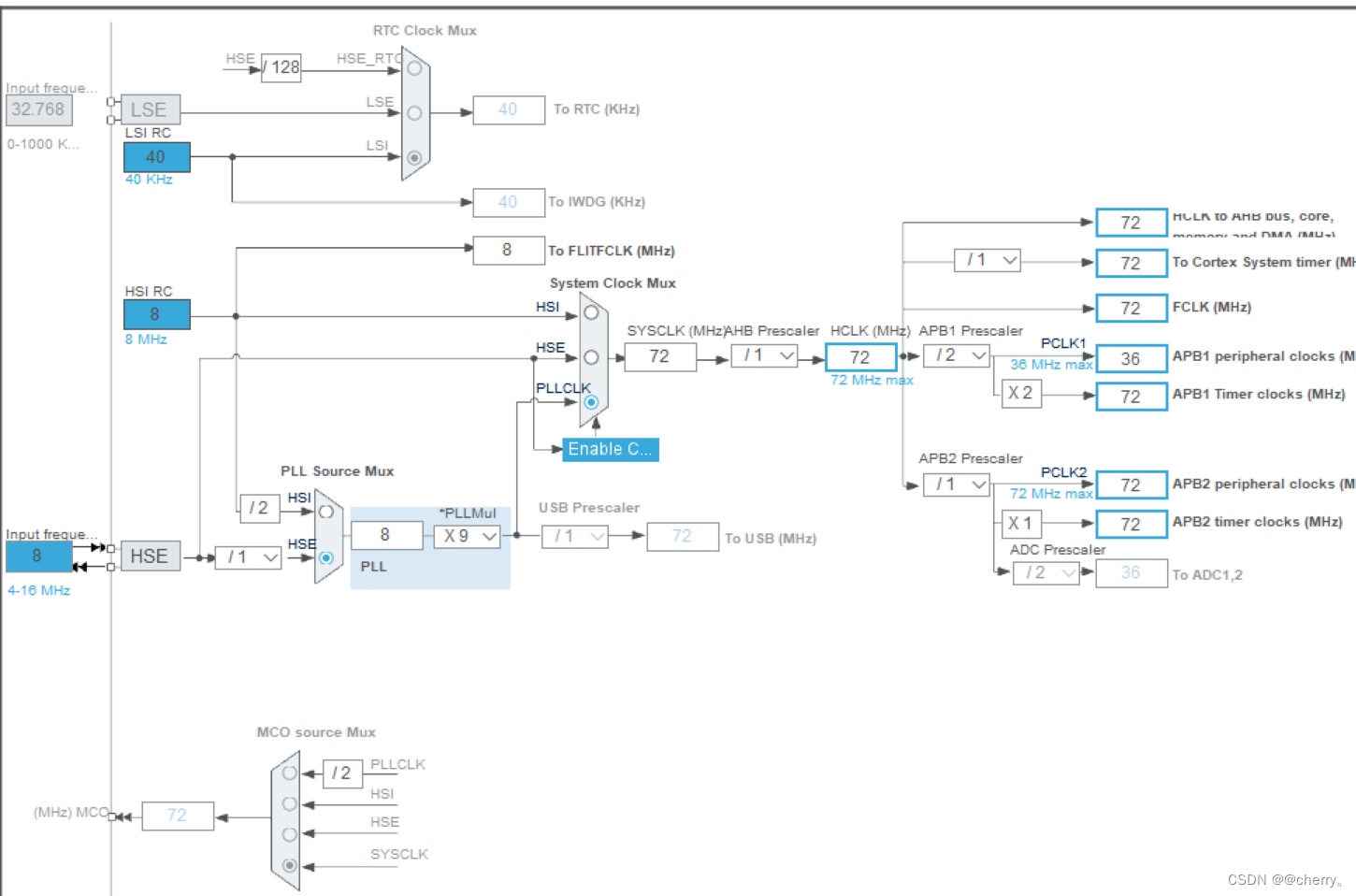
1、时钟,RCC等的配置与一般工程相似,就不在赘述,之前的博客中也有比较详细的步骤

2、IO口和定时时器配置
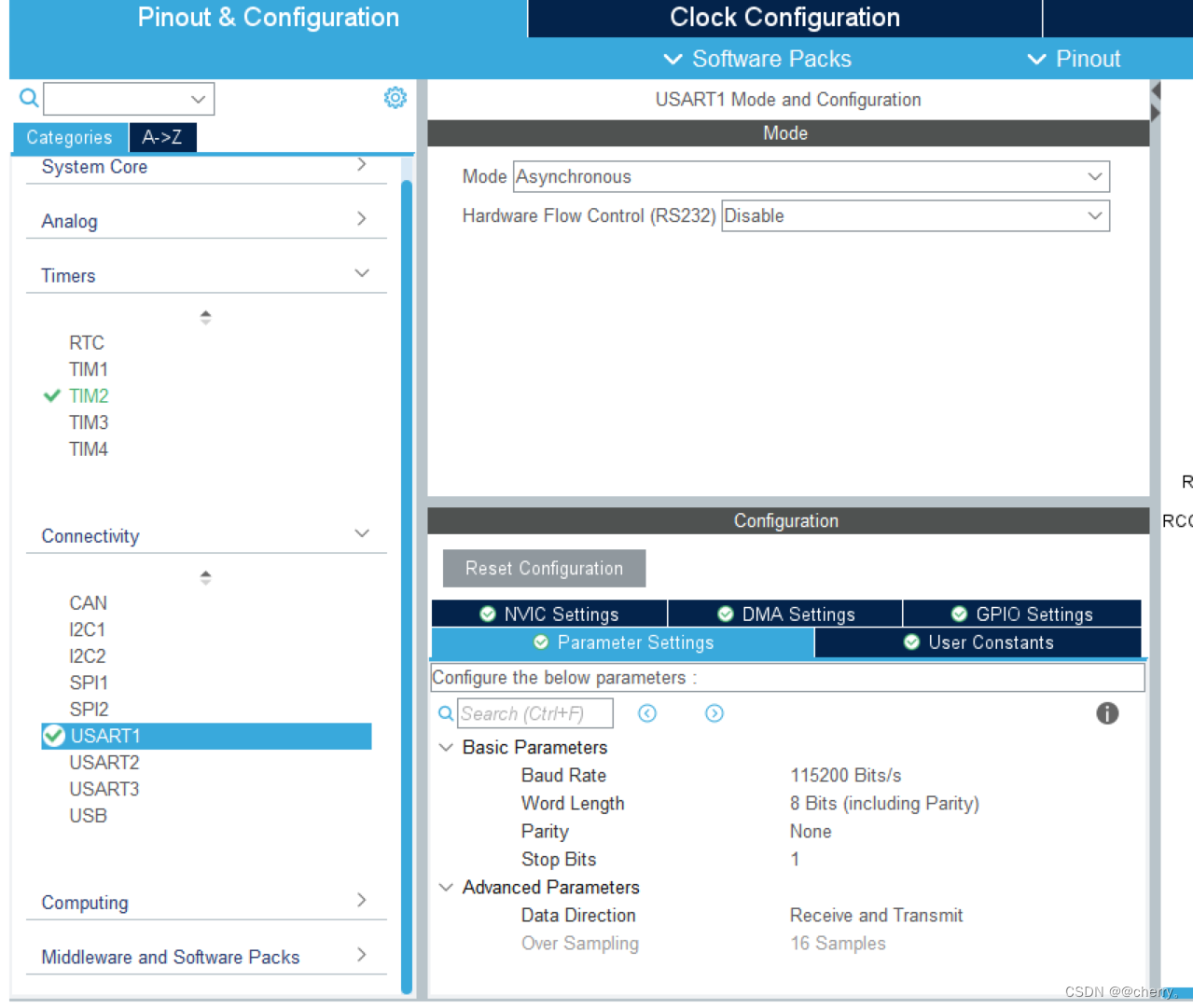
3、串口配置
四、代码实现
void SR04_GetData(void)
{
switch (measure_Cnt){case 0:TRIG_H;delay_us(30);TRIG_L;measure_Cnt++;__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); //启动输入捕获 或者: __HAL_TIM_ENABLE(&htim5); break;case 3:high_time = measure_Buf[1]- measure_Buf[0]; //高电平时间printf("\r\n----高电平时间-%d-us----\r\n",high_time); distant=(high_time*0.034)/2; //单位cmprintf("\r\n-检测距离为-%.2f-cm-\r\n",distant); measure_Cnt = 0; //清空标志位TIM2->CNT=0; //清空计时器计数break;}
}//===============================================us延时函数void delay_us(uint32_t us)//主频72M
{uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);while (delay--){;}
}
定时器中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//
{if(TIM2 == htim->Instance)// 判断触发的中断的定时器为TIM2{switch(measure_Cnt){case 1:measure_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获measure_Cnt++; break; case 2:measure_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1); //停止捕获 或者: __HAL_TIM_DISABLE(&htim5);measure_Cnt++; }}}
详细代码参考链接: link
五、实验结果