本文改进:SPPF_improve利用全局平均池化层和全局最大池化层,加入一些全局背景信息和边缘信息,从而获取全局视角信息并减轻不同尺度大小所带来的影响,强烈推荐,适合直接使用,paper创新级。
目录
1,YOLOv10介绍
1.1 C2fUIB介绍
1.2 PSA介绍
1.3 SCDown
2.SPP &SPPF9介绍
2.1 如何创新优化SPPF
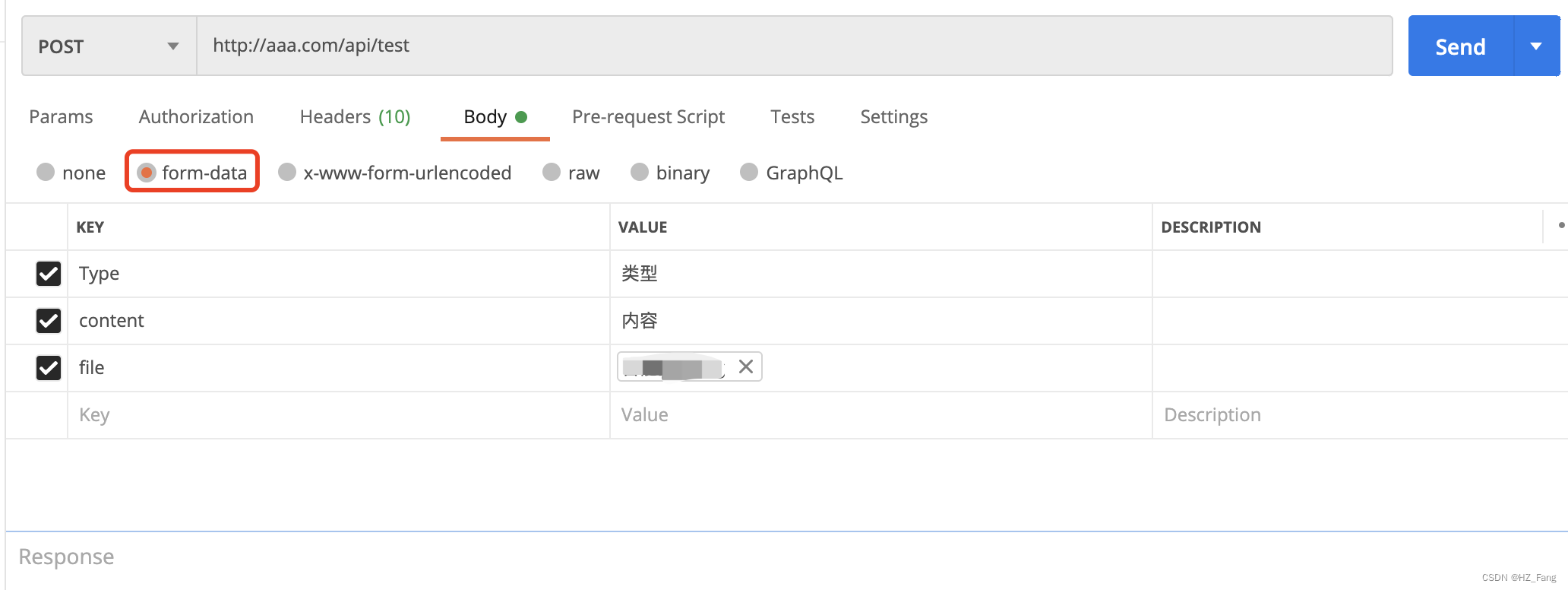
改进2:输入加入两个全局平均池化层,最后通过Concat连接
3,如何加入YOLOv10
3.1新建加入ultralytics/nn/sppf/SPPF improve.py
3.2 注册ultralytics/nn/tasks.pySPPF_improve进行注册
3.3 yolov10n-SPPF improve.yaml
1,YOLOv10介绍
论文:https://arxiv.org/pdf/2405.14458
代码:GitHub - THU-MIG/yolov10: YOLOv10: Real-Time End-to-End Object Detection
摘要:在过去的几年里,由于其在计算成本和检测性能之间的有效平衡,YOLOS已经成为实时目标检测领域的主导范例。研究人员已经探索了YOLOS的架构设计、优化目标、数据增强策略等,并取得了显著进展。然而,对用于后处理的非最大抑制 (NMS)的依赖妨碍了YOLOS的端到端部署,并且影响了推理延迟。此外,YOLOS中各部件的设计缺