简介:
基于Python和OpenCV的高速公路行驶车辆的速度检测系统旨在实时监测高速公路上的车辆,并测量它们的速度。该系统可以用于交通监控、道路安全管理等领域,为相关部门提供重要的数据支持。
系统实现:
-
视频流输入:系统可以从摄像头实时获取视频流,也可以从预先录制的视频文件中读取数据。这个视频流是系统的主要输入源,用于检测和跟踪车辆。
-
车辆检测:利用OpenCV中的目标检测技术,系统能够自动检测视频流中出现的车辆。这可以通过预训练的分类器(如Haar级联分类器)或深度学习模型(如YOLO)来实现。
-
车辆跟踪:一旦检测到车辆,系统会对它们进行跟踪,以捕获它们在连续帧之间的运动轨迹。OpenCV提供了多种对象追踪算法,可以根据实际情况选择合适的算法。
-
速度计算:通过分析车辆在视频中的运动轨迹,系统可以计算出它们的速度。这需要考虑摄像头的视角、帧率以及像素到实际距离的转换关系。
-
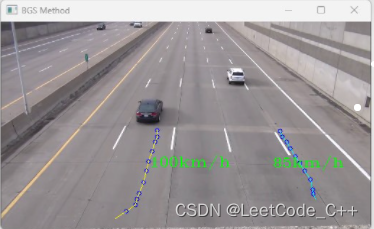
结果显示:系统会将检测到的车辆以及它们的速度信息绘制到视频流中,以便用户进行实时观察。同时,系统也可以将结果输出到控制台或文件中,供进一步分析和处理。
代码整体逻辑思路:
导入库文件:代码开始时导入了必要的库文件,包括用于GUI的Tkinter,用于图像处理的OpenCV,用于图像操作的PIL,以及其他标准的Python库,如os、time、uuid和math。
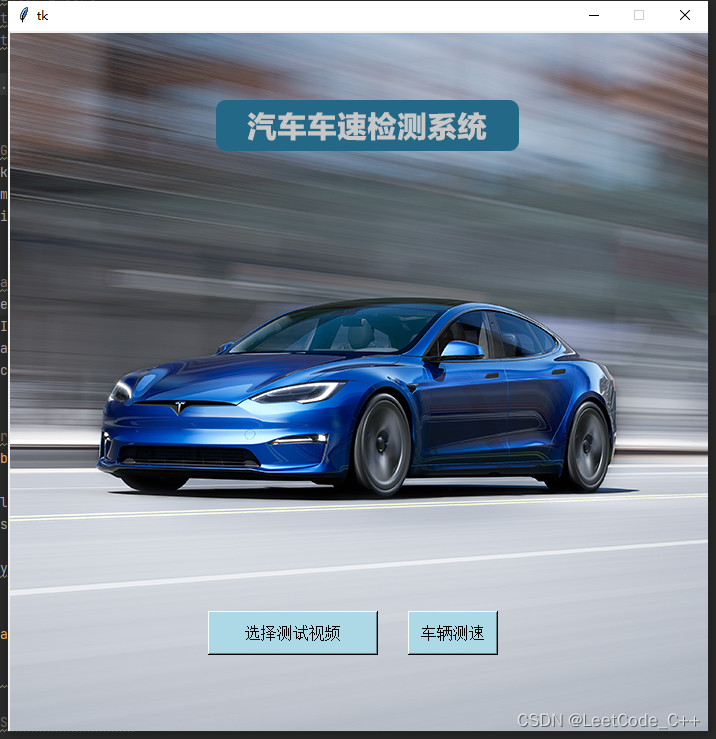
创建GUI:使用Tkinter创建GUI窗口,窗口大小为700x700像素,设置为不可调整大小。
显示图像:从文件中打开图像文件"z.png",使用PIL库加载图像,并使用Tkinter的Label部件将其显示在GUI窗口中。
导入视频文件:提供了一个函数callback(),用于打开文件对话框以选择视频文件,并在文本框中显示选择的文件路径。
上传视频文件:提供了一个函数upload(),用于获取文本框中的视频文件路径,然后执行车辆速度测量的主要功能。
车辆速度测量:这部分代码主要是用于处理视频文件和进行车辆速度测量。它包括以下主要步骤:
设置背景减法器并定义一些常量和参数。
使用OpenCV打开视频文件,并获取视频的帧率和分辨率。
实现卡尔曼滤波器来对车辆的运动进行估计和跟踪。
循环读取视频的每一帧,并进行以下操作:
对每一帧应用背景减法器,以便检测移动的物体。
查找视频帧中的物体轮廓,并根据其大小和位置进行筛选。
跟踪和测量车辆的速度。
在视频帧上绘制检测到的车辆轨迹和速度信息。
在GUI窗口中显示处理后的视频帧。
GUI控件绑定:将“选择测试视频”和“车辆测速”按钮与相应的函数绑定,以便在点击按钮时执行相应的操作。
运行主循环:通过调用root.mainloop()来启动Tkinter的主事件循环,使GUI应用保持运行状态,等待用户交互。
界面展示:
部分代码:
def calculate_speed (trails, fps):# distance: distance on the frame# location: x, y coordinates on the frame# fps: framerate# mmp: meter per pixeldist = cv2.norm(trails[0], trails[10]) #Calculates an absolute array normdist_x = trails[0][0] - trails[10][0]dist_y = trails[0][1] - trails[10][1]mmp_y = 0.2 / (3 * (1 + (3.22 / 432)) * trails[0][1])mmp_x = 0.2 / (5 * (1 + (1.5 / 773)) * (width - trails[0][1]))real_dist = math.sqrt(dist_x * mmp_x * dist_x * mmp_x + dist_y * mmp_y * dist_y * mmp_y)return real_dist * fps * 250 / 3.6def get_frame():" Grabs a frame from the video vcture and resizes it. "rval, frame = vc.read() if rval:(h, w) = frame.shape[:2]frame = cv2.resize(frame, (int(w * RESIZE_RATIO), int(h * RESIZE_RATIO)), interpolation=cv2.INTER_CUBIC)return rval, frame