引言
机器人技术作为现代科技的前沿领域,始终吸引着大量的关注与研究。波士顿动力公司作为这一领域的领军者,其创始人兼前CEO马克·雷伯特(Marc Raibert)近日在主持人莱克斯·弗里德曼(Lex Fridman)的播客节目中,分享了他对机器人技术的独特见解以及对未来发展的展望。本文将详细介绍这次访谈的内容,探讨波士顿动力在机器人研发方面的创新理念和未来方向。
机器人设计理念:不追求完美
功能性与实用性的重要性
马克在访谈中强调,机器人设计不需要追求“完美”。他认为,机器人的移动性、灵活性、感知和智能才是最重要的。机器人应该具备实际的功能性,而不仅仅是理论上的完美设计。马克举了一个例子,早期的六足机器人虽然在稳定性上做得很好,但其移动速度非常慢,缺乏实际的实用价值。
生物运动学的启发
马克在研究生时期参加的一次生物运动学会议上,看到一个六足机器人移动缓慢而笨拙,这让他萌生了制作跳跃机器人的想法。他认为,人类和动物能够通过肌肉记忆保持平衡,并利用腿部的弹性和肌肉进行能量循环,这种灵活性和智能性是机器人应该学习的。
波士顿动力的创新成果
动作灵活的机器人
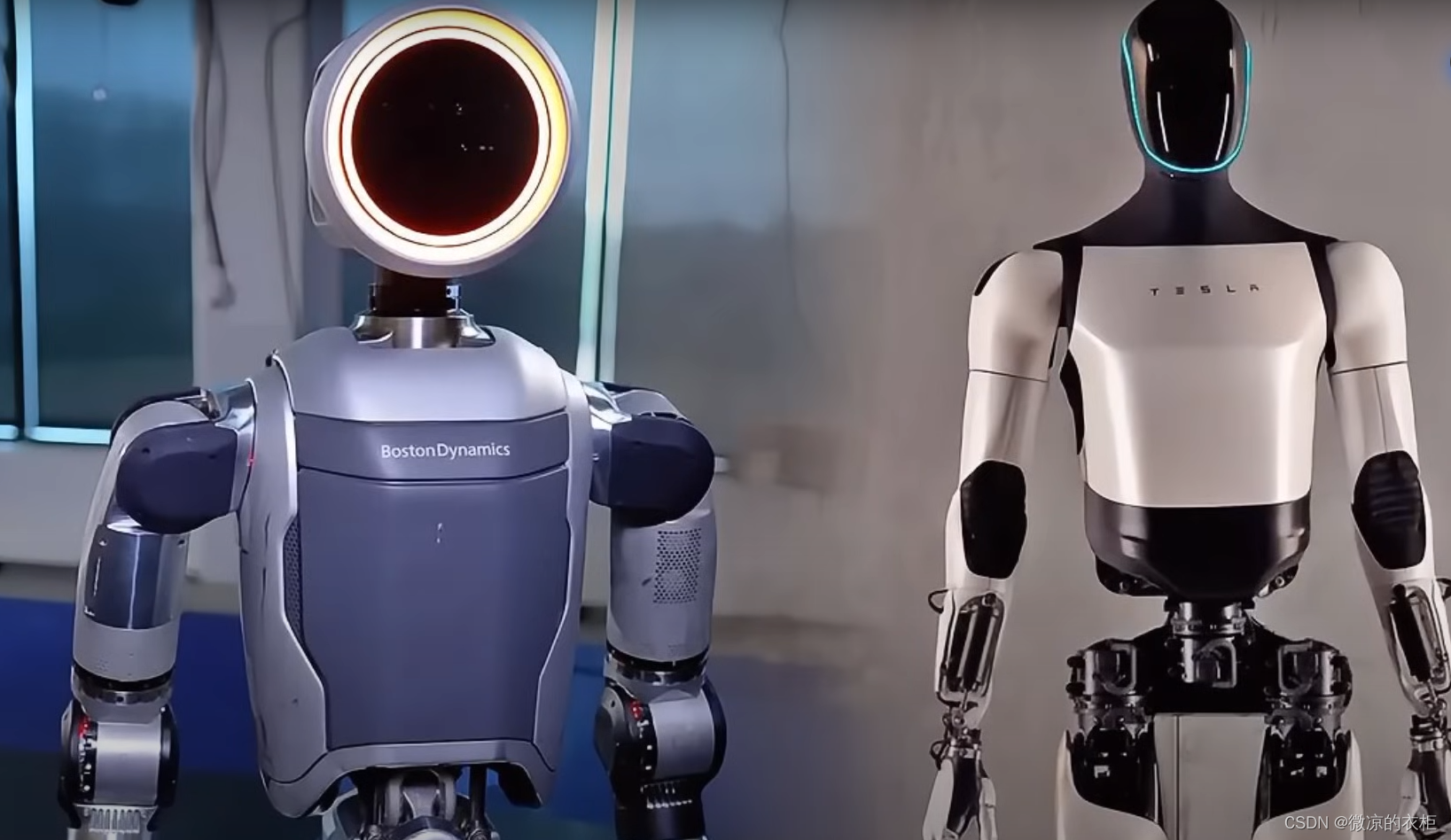
波士顿动力公司在过去的40多年里,创造了许多灵活且功能强大的机器人产品。例如,Big Dog和液压式Atlas的跳舞视频展示了这些机器人在运动能力方面的突出表现,打破了大众对机器人行动僵硬的刻板印象。
新版Atlas:从液压到电动
马克在访谈中介绍了波士顿动力放弃液压版Atlas,转而发布最新的电动版Atlas。他认为,尽管液压技术在某些方面表现出色,但复杂的液压系统对产品不友好,全电动的商业类人机器人将是未来的发展方向。电动版Atlas在性能上已经超过了特斯拉的Optimus。
未来机器人技术的挑战与发展
认知智能的探索
马克认为,机器人需要具备认知智能,即能够主动根据外部条件做出反应。为此,他创建了波士顿动力AI研究所,专注于研究如何让机器人“会看”而不是仅仅“能看”。研究所通过观察智能行为的过程,将行为流程分解成多个步骤,再教给机器人,实现机器人的智能化操作。
机器学习与传统控制方法的结合
尽管马克对机器学习持开放态度,并在苏黎世开设了一个办公室研究机器学习,但他认为传统的控制方法,如模型预测控制(MPC),依然在新产品的开发中发挥着重要作用。新版Atlas的大部分表现都基于MPC,这表明传统控制方法在机器人技术中仍有其价值。
商业化与未来展望
商业化的努力
马克坦承,波士顿动力在商业化方面依然面临挑战,但他对未来充满信心。Spot团队一直在努力提高机器人的可靠性,并取得了显著进展。目前已有15个Spot机器人投入实际应用。然而,成本问题依然存在,马克希望未来能够降低机器人的成本,使其更具市场竞争力。
机器人产业的未来
对于机器人产业的未来,马克表示,未来类人机器人将会像空气一样自然,即便走在马路上也无人在意。他特别看好社交机器人,例如家用的类似Spot的机器人,甚至认为机械宠物狗可能会取代真正的宠物狗,成为美国家庭的标配。
结论
马克·雷伯特的访谈为我们揭示了波士顿动力在机器人技术领域的创新理念和未来方向。从不追求完美的设计理念,到注重功能性和认知智能的探索,再到商业化的努力,波士顿动力始终走在科技创新的前沿。尽管未来依然充满挑战,但马克和他的团队相信,只要保持勇气和兴趣,机器人技术将不断进步,为社会带来更多福祉和价值。
你可以更全面地了解波士顿动力的技术细节和未来发展,进一步提升对机器人技术的认识和理解。
![[Mdfs] lc3067. 在带权树网络中统计可连接服务器对数目(邻接表+图操作基础+技巧+好题)](https://img-blog.csdnimg.cn/direct/fde198b18881419a8e203007e647bb0c.png)



![[DDR4] DDR 简史](https://img-blog.csdnimg.cn/direct/8d31fad7a28745eb81e253606f226423.png#pic_center)