基于yolo的物体识别坐标转换


本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/366003.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
旋转变压器软件解码simulink仿真
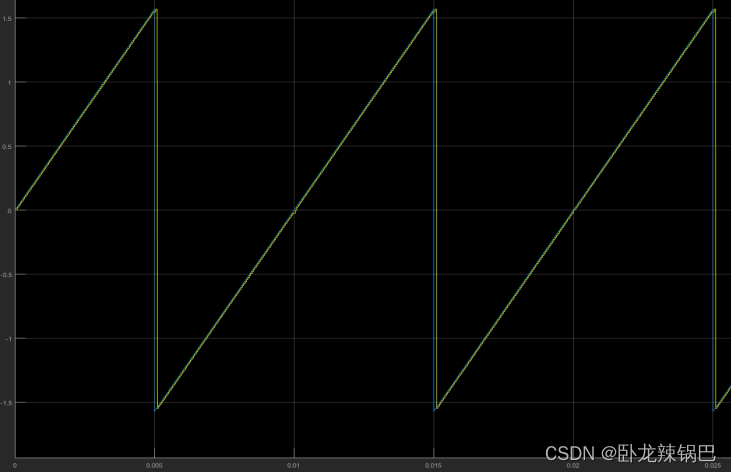
1.介绍 旋转变压器是一种精密的位置、速度检测装置,尤其适用于高温、严寒、潮湿、高速、振动等环境恶劣、旋转编码器无法正常工作的场合。旋转变压器在使用时并不能直接提供角度或位置信息,需要特殊的激励信号和解调、计算措施,才能将旋转变压…
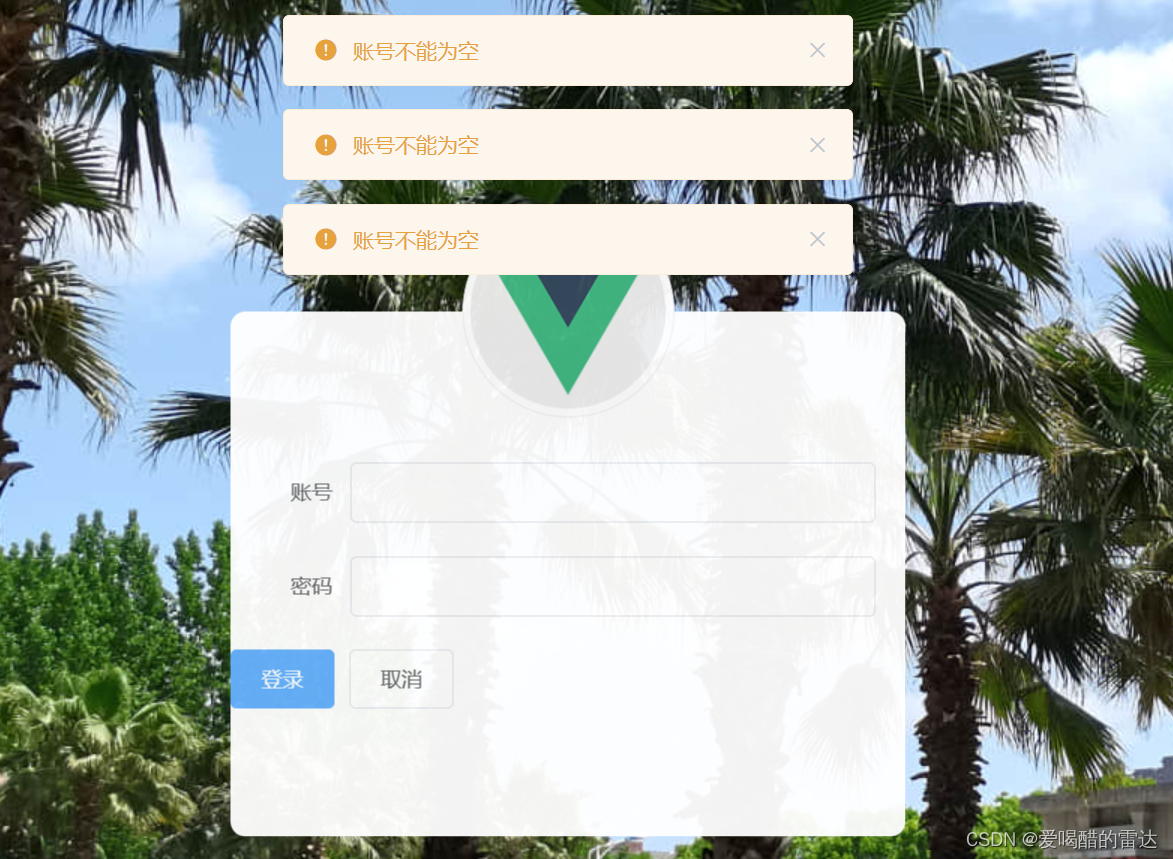
Element UI搭建使用过程
本章内容基于上一篇---Vue-cli搭建项目基础版
Vue-cli搭建项目----基础版-CSDN博客
官网地址:Element - The worlds most popular Vue UI framework
介绍:完全基于Vue.js ,用于快速搭建用户界面.
第一步:安装ElementUI
在终端输入
npm i element-ui -S
在main.js输入
…

Golang-map理解
golang-map语雀笔记整理 map的底层实现hmapbmap map是如何做到O(1)的复杂度的?map扩容策略 师兄问题回答 map的底层实现 hmap
hmap的结构体核心字段有:buckets 桶数组地址, B 定位值,桶的数目是2^B个, count 当前map的…
一个 API 客户端和一份 TS 学习手册
第75期:
Insomnia:超好看的 API 客户端
项目介绍:
一款适用于 GraphQL、REST、WebSockets 和 gRPC 的开源 API 客户端,颜值超高。
跨平台,支持 Mac、Windows 和 Linux。但不支持网页版,需要下载客户端。…
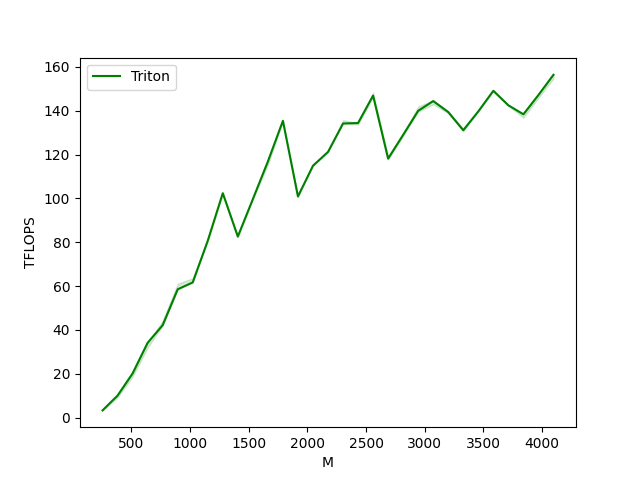
【AI编译器】triton学习:矩阵乘优化
Matrix Multiplication
主要内容:
块级矩阵乘法 多维指针算术 重新编排程序以提升L2缓存命 自动性能调整
Motivations
矩阵乘法是当今高性能计算系统的一个关键组件,在大多数情况下被用于构建硬件。由于该操作特别复杂,因此通常由软件提…

【论文复现|智能算法改进】基于自适应动态鲸鱼优化算法的路径规划研究
目录 1.算法原理2.改进点3.结果展示4.参考文献5.代码获取 1.算法原理
SCI二区|鲸鱼优化算法(WOA)原理及实现【附完整Matlab代码】
2.改进点
非线性收敛因子
WOA 主要通过控制系数向量 A 来决定鲸鱼是搜索猎物还是捕获猎物,即系数向量 A 可…
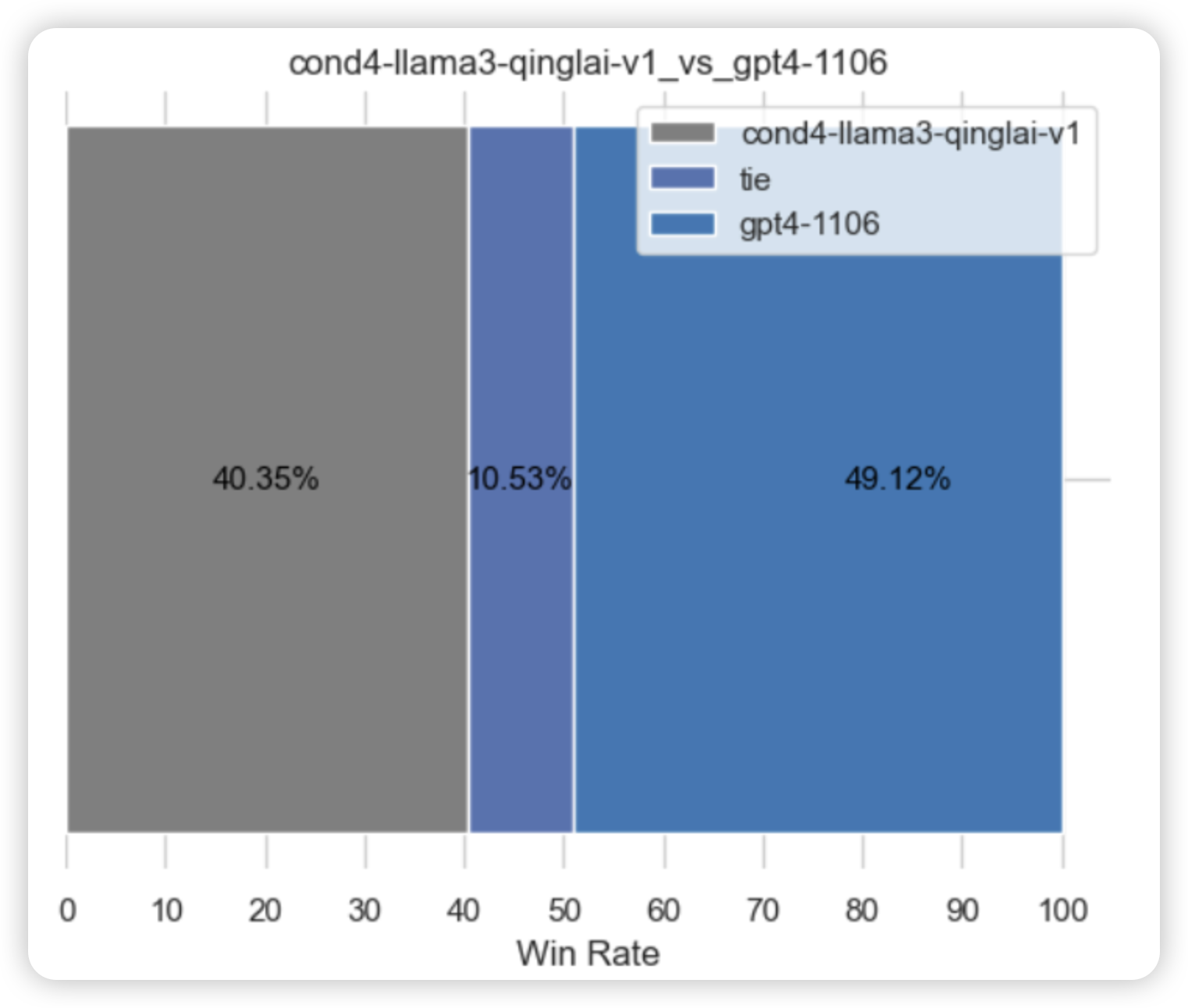
七月论文审稿GPT第5版:拿我司七月的早期paper-7方面review数据集微调LLama 3
前言
llama 3出来后,为了通过paper-review的数据集微调3,有以下各种方式
不用任何框架 工具 技术,直接微调原生的llama 3,毕竟也有8k长度了 效果不期望有多高,纯作为baseline通过PI,把llama 3的8K长度扩展…

应用案例 | 如何监测高价值货物在物流运输过程中受到的振动和冲击?全面保障货物安全
一、货物运输
不同种类的货物对运输的要求不同,钢铁、煤炭、矿石等大宗物资通常对运输要求较低,而电子产品、IT 产品、家电等高价值敏感类货物则更强调运输的安全性和时效性,往往希望能尽可能安全和快速送达这类货物,使之尽快进入…

SpringBoot:SpringBoot中调用失败如何重试
一、引言 在实际的应用中,我们经常需要调用第三方API来获取数据或执行某些操作。然而,由于网络不稳定、第三方服务异常等原因,API调用可能会失败。为了提高系统的稳定性和可靠性,我们通常会考虑实现重试机制。 Spring Retry为Spri…
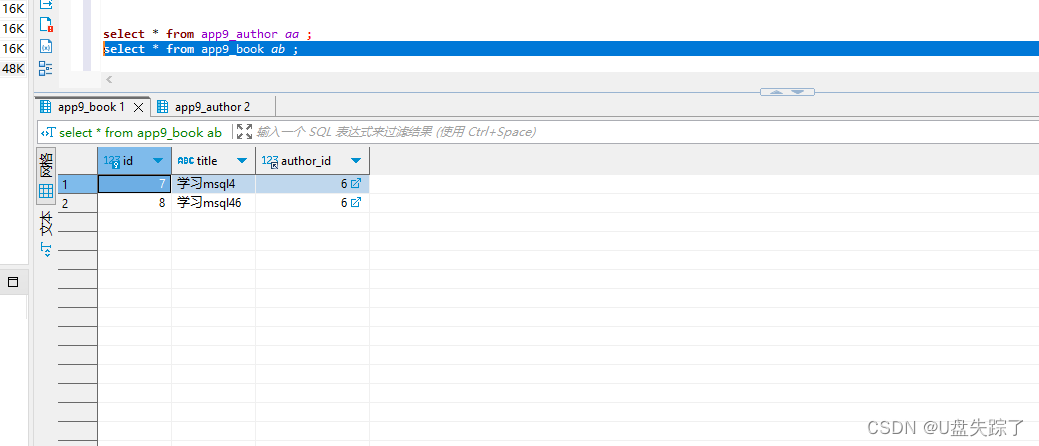
Django 一对多关系
1,创建 Django 应用
Test/app9
django-admin startapp app9 2,注册应用
Test/Test/settings.py 3,添加应用路由
Test/Test/urls.py
from django.contrib import admin
from django.urls import path, includeurlpatterns [path(admin/,…

uniApp获取实时定位
通过你获取的key放到项目manifest.json里面,对应填写你所需要的key值,还有高德用户名
用户名: key值的位置: 代码:
html:
<view class"intList pdNone"><view class"label">详细地…
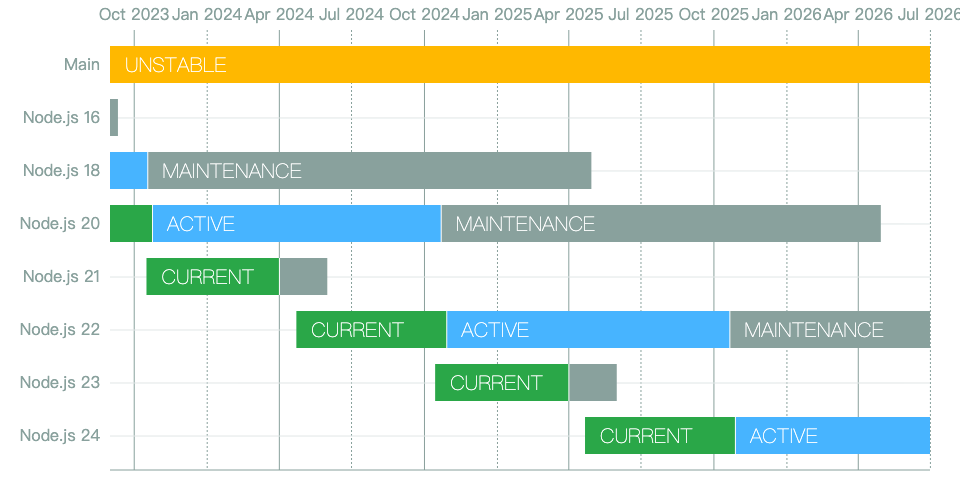
使用 nvm 管理 Node 版本及 pnpm 安装
文章目录 GithubWindows 环境Mac/Linux 使用脚本进行安装或更新Mac/Linux 环境变量nvm 常用命令npm 常用命令npm 安装 pnpmNode 历史版本 Github
https://github.com/nvm-sh/nvm
Windows 环境
https://nvm.uihtm.com/nvm.html
Mac/Linux 使用脚本进行安装或更新
curl -o- …
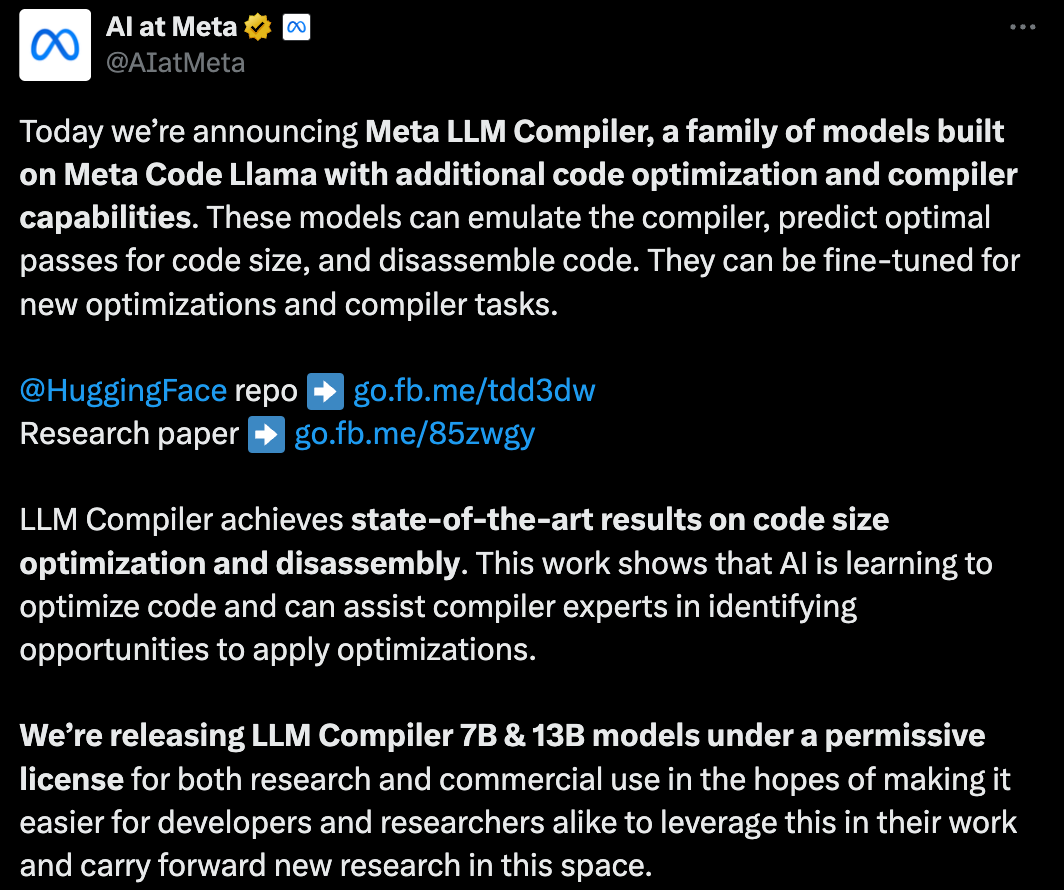
AI大模型日报#0701:Meta发布LLM Compiler、扒一扒Sora两带头人博士论文
导读:AI大模型日报,爬虫LLM自动生成,一文览尽每日AI大模型要点资讯!目前采用“文心一言”(ERNIE-4.0-8K-latest)生成了今日要点以及每条资讯的摘要。欢迎阅读!《AI大模型日报》今日要点…

Kotlin/Android中执行HTTP请求
如何在Kotlin/Android中执行简单的HTTP请求
okhttp官网 okhttp3 github地址
打开build.gradle.kts文件加入依赖
dependencies {implementation("com.squareup.okhttp3:okhttp:4.9.0")
}在IDEA的Gradle面板点击reload按钮便会自动下载jar
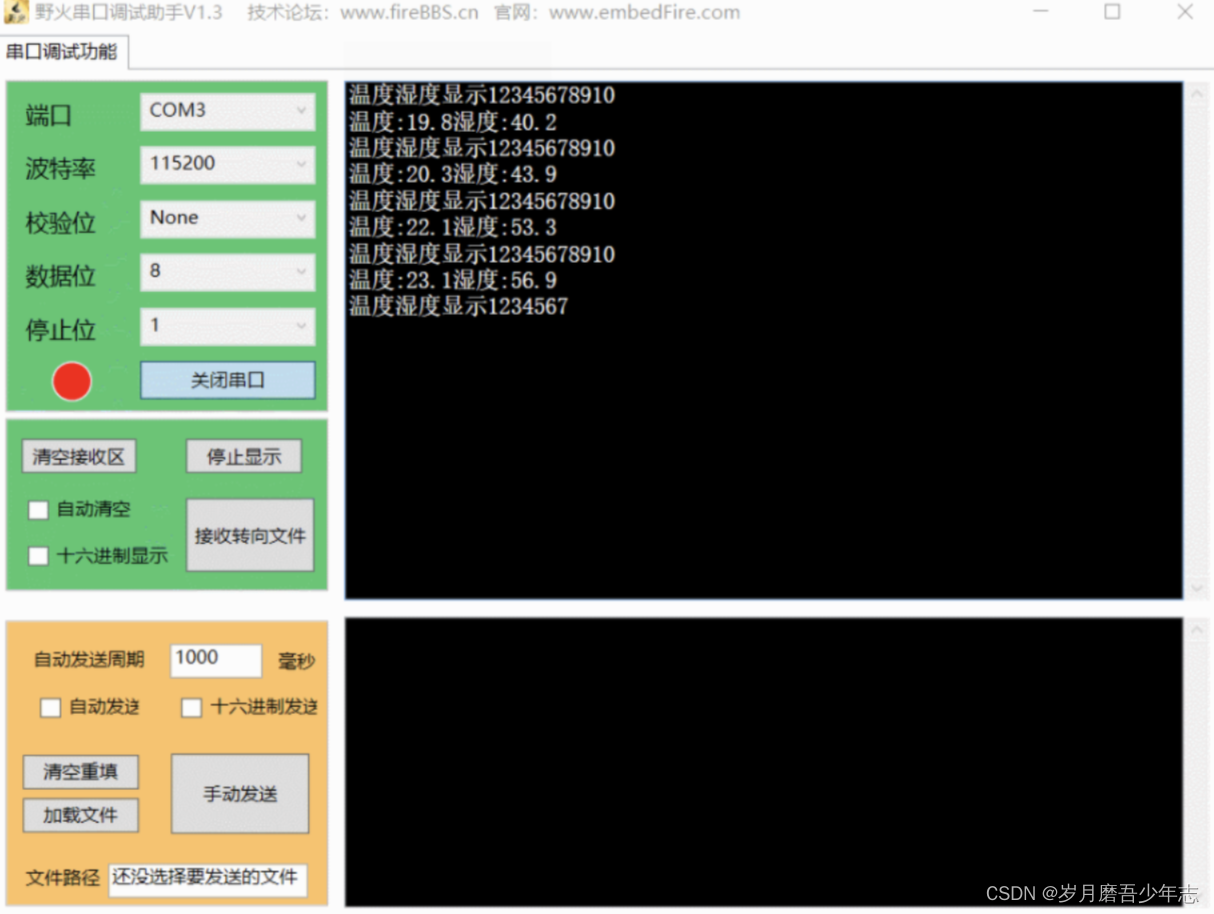
【STM32】温湿度采集与OLED显示
一、任务要求
1. 学习I2C总线通信协议,使用STM32F103完成基于I2C协议的AHT20温湿度传感器的数据采集,并将采集的温度-湿度值通过串口输出。
任务要求:
1)解释什么是“软件I2C”和“硬件I2C”?(阅读野火配…
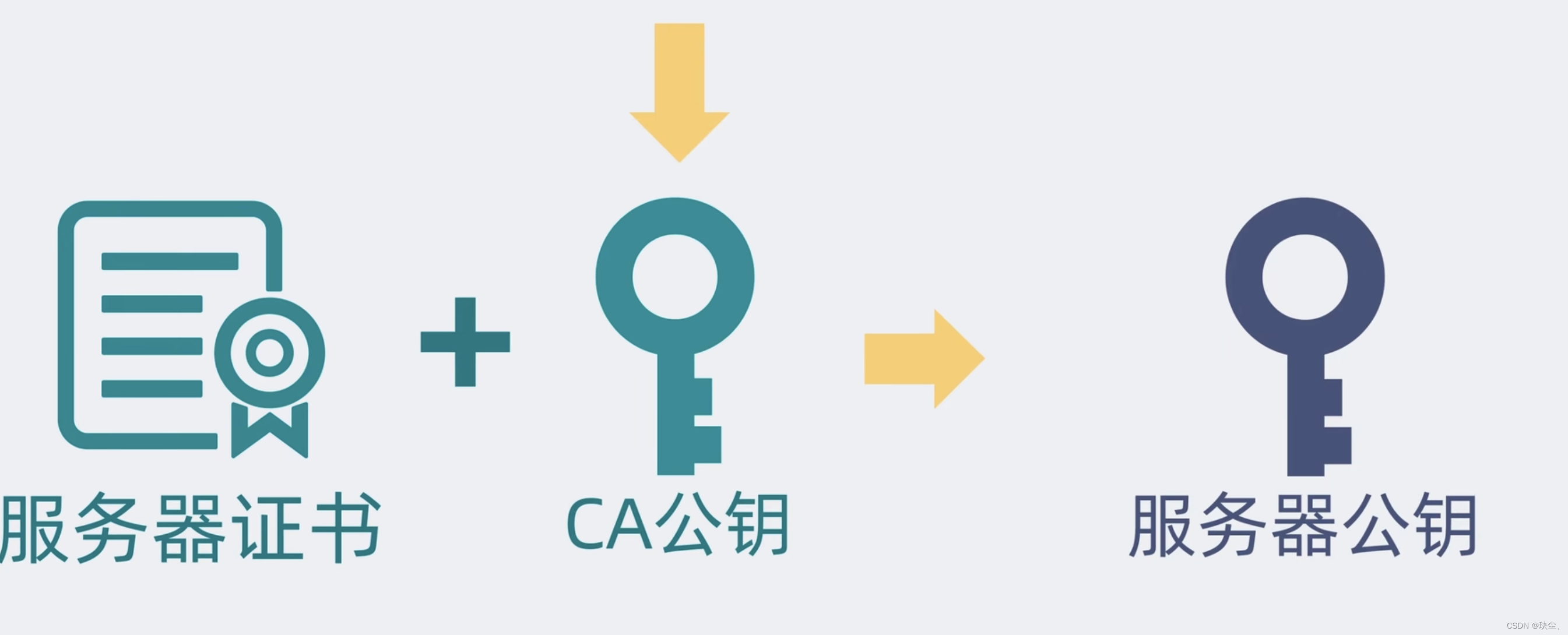
HTTPS是什么?原理是什么?用公钥加密为什么不能用公钥解密?
HTTPS(HyperText Transfer Protocol Secure)是HTTP的安全版本,它通过在HTTP协议之上加入SSL/TLS协议来实现数据加密传输,确保数据在客户端和服务器之间的传输过程中不会被窃取或篡改。 HTTPS 的工作原理 客户端发起HTTPS请求&…
![C++进阶 | [4.3] 红黑树](https://img-blog.csdnimg.cn/direct/199968d1cf8d44ba8fc67be74f7a875f.png)
C++进阶 | [4.3] 红黑树
摘要:什么是红黑树,模拟实现红黑树 红黑树 ,是一种 二叉搜索树 ,但 在每个结点上增加一个存储位表示结点的颜色,可以是 Red 或 Black 。 通过对 任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树…
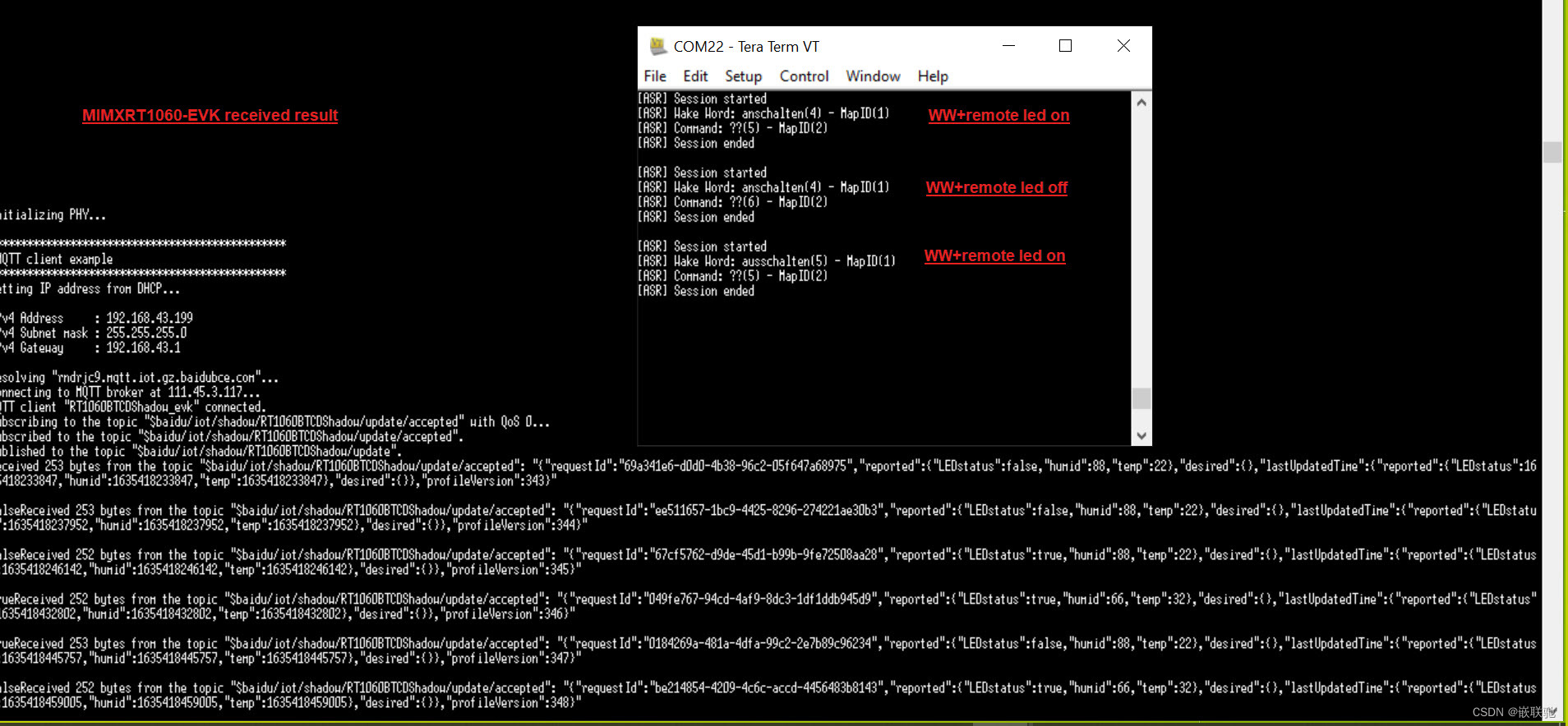
【RT摩拳擦掌】基于RT106L/S语音识别的百度云控制系统
【RT摩拳擦掌】基于RT106L/S语音识别的百度云控制系统 一 文档简介二 平台构建2.1 使用平台2.2 百度智能云2.2.1 物联网核心套件2.2.2 在线语音合成 2.3 playback语音数据准备与烧录2.4 开机语音准备与添加2.5 唤醒词识别词命令准备与添加 三 代码准备3.1 sln-local/2-iot 代码…

cube-studio开源一站式机器学习平台,在线ide,jupyter,vscode,matlab,rstudio,ssh远程连接,tensorboard
全栈工程师开发手册 (作者:栾鹏) 一站式云原生机器学习平台 前言
开源地址:https://github.com/tencentmusic/cube-studio
cube studio 腾讯开源的国内最热门的一站式机器学习mlops/大模型训练平台,支持多租户&…
推荐文章
- 乐视回应四天半工作制:体感非常好;OpenAI CEO 否认在训练 GPT-5;iOS 17 或增加更多灵动岛功能|极客头条...
- 5G SSB(同步信号块)位于物理层
- #include <iostream>介绍
- (1)(1.11) LeddarTech Leddar One
- (css)element-ui表格行图片点击放大且可调整preview-src-list大图预览样式
- (docker)mysql镜像拉取-创建容器-容器的使用【个人笔记】
- (Note)机器学习面试题
- (Note)计算机专业术语 - Socket (套接字)
- (二十五)大数据实战——kafka集群及Kafka-Eagle控制台安装与部署
- (六)Shell 脚本应用(1):基础与环境变量详解
- (四)C++自制植物大战僵尸游戏启动流程
- (详解)数据结构-----------栈与队列 c语言实现