一、EtherCAT简介
EtherCAT(Ethernet for Control Automation Technology)是一种实时以太网技术,是由德国公司Beckhoff Automation在2003年首次推出的。它是一种开放的工业以太网标准,被设计用于满足工业自动化应用中的高性能和低延迟需求。如运动控制、机器人、包装机械等等。
二、基本原理
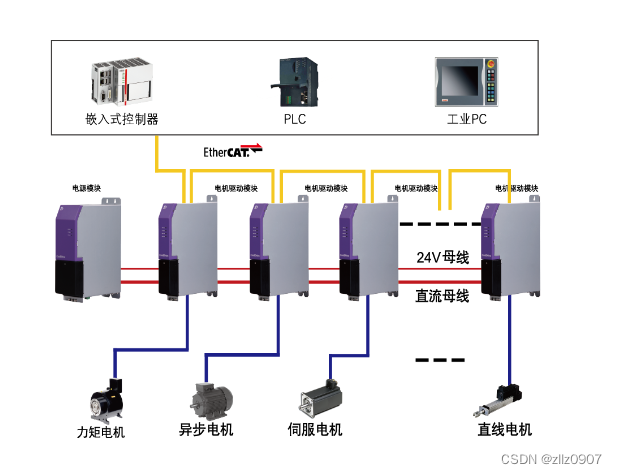
EtherCAT的基本工作原理是基于主从架构。主设备控制网络并管理数据通信,而从设备通常是传感器、执行器或分布式I/O模块。EtherCAT利用标准的以太网帧进行通信,但对其内部的帧结构进行了优化,使之更适合实时控制应用。
1. 数据帧结构
EtherCAT数据帧在标准以太网帧(Ethernet Frame)内部封装了多个子帧,每个子帧对应网络中的一个或多个从设备。每次帧传输都可以实现对多个从设备的数据读写。
帧头(Ethernet Header): 包含源地址、目的地址、以及以太网类型等信息。
EtherCAT帧头: 包含EtherCAT专用的命令、地址等信息。
EtherCAT数据: 按照从设备的地址分割的数据区域。
2. 数据传输模式
相较于传统以太网,EtherCAT使用了独特的处理方式,使其通信效率极高:
处理器内处理技术(Processing on the fly): 从设备在数据帧传输过程中直接读取和插入数据,而无需完整接收和再发送整个帧。这大大降低了通信延迟。
循环拓扑(Ring Topology): 支持线性、树形或者环形等复杂拓扑。在环形拓扑中,如果某个节点出问题,数据包可以寻找备用路径,实现冗余。
3. 通信周期和同步
EtherCAT可以实现非常短的通信周期(通常在微秒级别),以及较高的同步精度(小于1微秒)。这是通过以下方式实现的:
分布式时钟(Distributed Clocks): 从设备通过本地时钟和主站同步,从而实现高精度的时间同步。
循环通信(Cyclic Communication): 允许主设备按照固定时间间隔发送数据帧,实现周期性数据更新。
4. 配置和诊断
配置文件(Configuration Files): 使用XML格式的设备描述文件(ESI)来定义从设备的特性,如地址、功能和参数。
诊断功能(Diagnostic Functions): 实时监控各种网络参数,如通信状态、错误信息等,以便迅速定位和解决问题。
三、优劣势
1. 优势
高性能: 实现了纳秒级的通信延迟和微秒级的同步精度。
灵活性: 支持多种拓扑结构,易于扩展。
开放性: 作为开放标准,广泛受到工业自动化厂商的支持。
2. 劣势
复杂度: 配置和调试可能较为复杂,需要专业知识。
成本: 对于小规模和低性能要求的项目,可能显得过于昂贵和复杂。