随着科技的飞速发展,卫星遥感技术已成为获取地球表面信息的重要手段之一。卫星遥感图像以其覆盖范围广、数据量大、信息丰富等特点,在环境监测、城市规划、灾害评估等多个领域发挥着不可替代的作用。然而,面对海量的卫星图像数据,尤其是当需要对图像中的特定目标如地面建筑物进行精细分析时,传统的人工方法显得力不从心。幸运的是,人工智能(AI)技术的兴起,特别是深度学习领域的突破,为这一难题提供了有效的解决方案。本文将探讨智能化分割检测模型在遥感图像地面建筑物分析中的应用及其优势。
遥感图像通常具有极高的分辨率和庞大的数据量,这既是优势也是挑战。对于地面建筑物的识别与分析而言,主要难点包括:
1、数据量大:卫星每天产生的海量图像数据,人工处理效率低下且成本高昂。
2、目标多样性:地面建筑物形态各异,包括高楼、平房、桥梁、塔楼等,增加了识别的复杂度。
3、环境干扰:云层遮挡、阴影、植被覆盖等因素可能影响建筑物的准确识别。
为了克服上述挑战,智能化分割检测模型应运而生。这类模型通过深度学习算法,能够自动学习图像中的特征,实现对目标物体的精确分割与检测。具体步骤包括:
1、数据预处理:对原始的卫星遥感图像进行裁剪、归一化等处理,生成标准化的数据集。这一步是确保模型训练效果的关键。
2、智能标注辅助:利用如SAM(Segment Anything Model ,分割一切模型)等开源工具,自动或半自动地生成图像目标的初步掩模信息。这些掩模信息虽需人工修正,但大大提高了标注效率。
3、模型训练:基于处理好的数据集,选择合适的深度学习框架(如TensorFlow、PyTorch)和分割检测模型(如U-Net、Mask R-CNN)进行训练。通过不断优化模型参数,提升其对地面建筑物的识别精度。
4、结果评估与优化:利用验证集和测试集对模型性能进行评估,根据评估结果调整模型结构或参数,以达到最佳效果。
本文正是基于这个思考背景下,想要基于智能化的分割检测模型来应用实践开发构建遥感影像下的地面建筑物分割检测系统,首先看下实例效果:

接下来看下数据实例:


这里我直接使用的是官方v7.0分支的代码,项目地址在这里,如下所示:

如果不会使用可以参考我的教程:
《基于yolov5-v7.0开发实践实例分割模型超详细教程》
非常详细的操作实践教程,这里就不再赘述了。
这里我们一共开发了全系列五款不同参数量级的模型,实验阶段保持相同的参数设置,等待所有模型训练完成之后,我们来对其各个指标进行对比可视化。
【Precision曲线】
精确率曲线(Precision Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。
根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。

【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
绘制召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的召回率和对应的精确率。
将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。
根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。

【loss曲线】
在深度学习的训练过程中,loss函数用于衡量模型预测结果与实际标签之间的差异。loss曲线则是通过记录每个epoch(或者迭代步数)的loss值,并将其以图形化的方式展现出来,以便我们更好地理解和分析模型的训练过程。

【mAP0.5】
mAP0.5,也被称为mAP@0.5或AP50,指的是当Intersection over Union(IoU)阈值为0.5时的平均精度(mean Average Precision)。IoU是一个用于衡量预测边界框与真实边界框之间重叠程度的指标,其值范围在0到1之间。当IoU值为0.5时,意味着预测框与真实框至少有50%的重叠部分。
在计算mAP0.5时,首先会为每个类别计算所有图片的AP(Average Precision),然后将所有类别的AP值求平均,得到mAP0.5。AP是Precision-Recall Curve曲线下面的面积,这个面积越大,说明AP的值越大,类别的检测精度就越高。
mAP0.5主要关注模型在IoU阈值为0.5时的性能,当mAP0.5的值很高时,说明算法能够准确检测到物体的位置,并且将其与真实标注框的IoU值超过了阈值0.5。

【mAP0.5:0.95】
mAP0.5:0.95,也被称为mAP@[0.5:0.95]或AP@[0.5:0.95],表示在IoU阈值从0.5到0.95变化时,取各个阈值对应的mAP的平均值。具体来说,它会在IoU阈值从0.5开始,以0.05为步长,逐步增加到0.95,并在每个阈值下计算mAP,然后将这些mAP值求平均。
这个指标考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。当mAP0.5:0.95的值很高时,说明算法在不同阈值下的检测结果均非常准确,覆盖面广,可以适应不同的场景和应用需求。
对于一些需求比较高的场合,比如安全监控等领域,需要保证高的准确率和召回率,这时mAP0.5:0.95可能更适合作为模型的评价标准。
综上所述,mAP0.5和mAP0.5:0.95都是用于评估目标检测模型性能的重要指标,但它们的关注点有所不同。mAP0.5主要关注模型在IoU阈值为0.5时的性能,而mAP0.5:0.95则考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。

【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
绘制F1值曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率、召回率和F1分数。
将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。
根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。

综合对比来看,n系列模型效果最差,s系列效果次之,其余三款模型达到了相近的结果。接下来为了依次对比不同系列的模型详细情况,我们分开每个指标下面每个模型进行可视化,如下:
【F1值】

【loss】

【mAP0.5】

【mAP0.5:0.95】

【Precision】

【Recall】

【Mask实例】

【Batch实例】

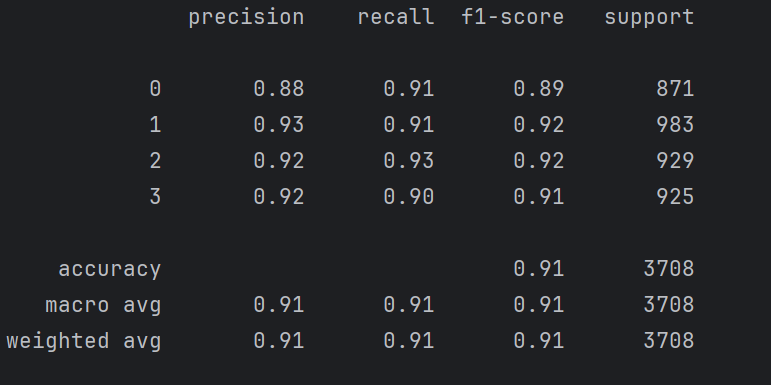
【混淆矩阵】

【F1值曲线】

【Precision曲线】

【PR曲线】

【Recall曲线】

【训练可视化】

传统的数据领域中引入AI智能化的模型,可以大大提质增效,智能化分析的优势
1、高效性:自动化处理流程极大地提高了数据处理速度,能够在短时间内完成大规模图像的分析任务。
2、准确性:深度学习模型通过大量数据的学习,能够捕捉到人类难以察觉的细微特征,从而提高识别的准确性。
3、可扩展性:模型训练完成后,可以轻松应用于其他类型的遥感图像分析任务,实现功能的快速扩展。
4、智能化决策支持:结合GIS(地理信息系统)等技术,智能化分割检测模型可以为城市规划、灾害评估等领域提供精准的数据支持,助力科学决策。
智能化分割检测模型在遥感图像地面建筑物分析中的应用,不仅解决了传统人工方法效率低下、成本高昂的问题,还通过深度学习技术的引入,实现了对复杂场景的精准识别与分析。随着技术的不断进步和应用的深入拓展,我们有理由相信,智能化分割检测模型将在更多领域发挥重要作用,推动遥感技术的进一步发展。本文仅从实验性质的角度出发做了基础的实践工作,作为抛砖引玉,希望未来会有更大的发展空间。