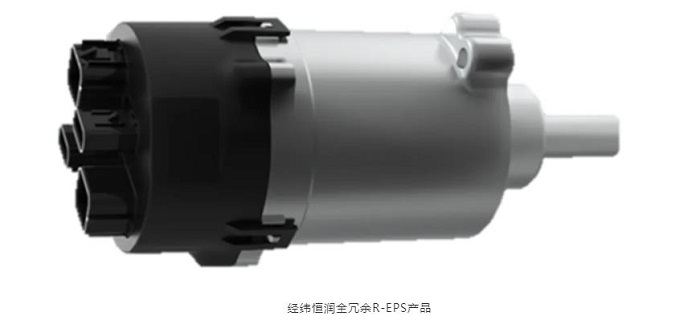
随着L4级别自动驾驶技术的逐步成熟与商业化进程加速,行业对车辆安全性的要求达到了新的高度。为了确保自动驾驶车辆全天候、全路况下安全运行,冗余系统的研发与应用成为关键。在这一背景下,经纬恒润开发了齿条式全冗余电动助力转向系统R-EPS(Rack-Electronic Power Steering)产品。该产品在2023年适配文远知行与江铃合作的 L4级别自动驾驶车型Robovan,目前已完成了数十万公里的实际道路验证。此外,在今年10月即将发布的一款支持L4级自动驾驶的客运车型中,也同样搭载了经纬恒润的全冗余R-EPS产品。随着多个L4级项目的落地,经纬恒润全冗余R-EPS产品在行业中的影响力逐步提升。

经纬恒润全冗余R-EPS产品,软硬件冗余设计,关键信号通过ECU间私有CAN通信共享,在发生异常故障情况下具备容错运行的能力,以高可靠性、高稳定性、高安全性和高转向性能,满足L2-L4自动驾驶各类车型的转向需求。经过两年多时间的潜心开发,在L4自动驾驶的转角响应已取得多项突破。
● 采用目标转角速度自适应前馈补偿算法,解决了不同车速下、全角度范围内转角响应速度慢,跟随延迟较大的问题
● 通过非线性阻尼控制算法,提升了快速响应时的动态稳定性,以及转角稳态过程中的抗干扰能力
● 两套控制器采用主从控制策略,提升了转角控制的协同度,增加了系统容错度
● 角度响应以及角速度响应范围会根据车速做安全边界,确保车辆横向安全
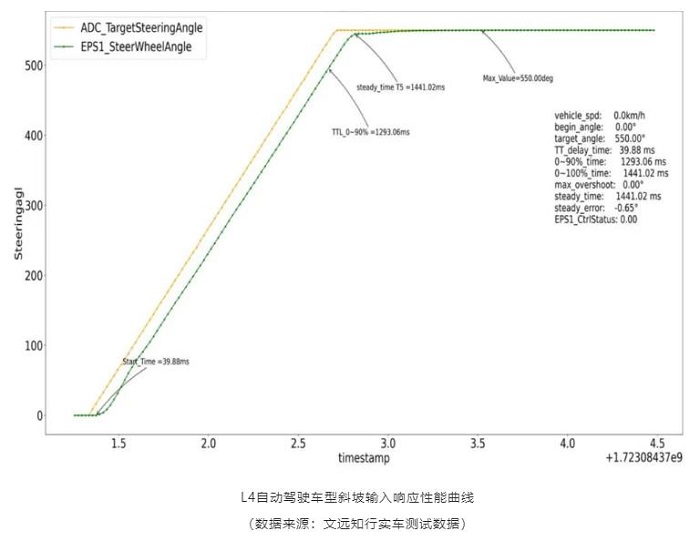
经纬恒润全冗余R-EPS产品的两套控制器均具备独立自主的转角控制能力,在任一控制器发生失效时,另一个无故障控制器可作为主控制器继续工作。无故障控制器可输出50%的最大转向能力,在车辆满载情况下可覆盖90%的转向角度,能够以≥400°/s的转角速度响应转角请求,可为L4自动驾驶提供高安全保障和性能。据实车测试结果显示,在车速0~100Km/h范围内,R-EPS 转角指令执行时间、达到稳态时间、超调量、稳态误差等动态和稳态转角控制性能表现优良。
● 全角度范围内斜坡输入(±0.1°~±550°),响应延迟时间平均值65ms,响应速度快
● 全角度范围内400°/s斜坡输入(±0.1°~±550°),稳态绝对误差最大值≤0.7°,响应精度高
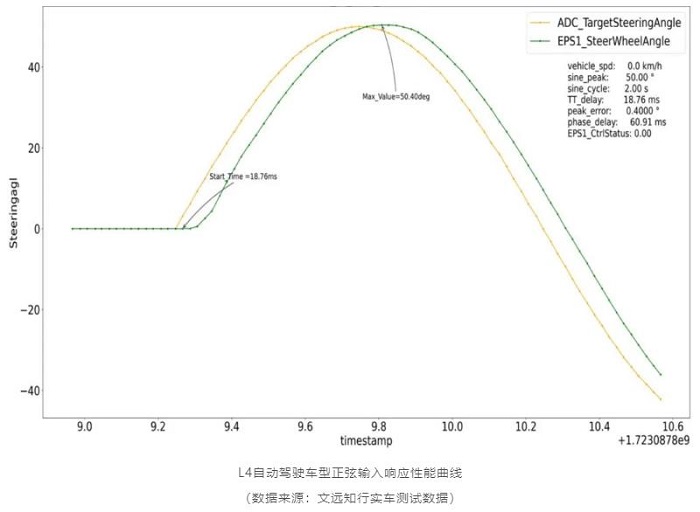
● 幅值1~50°,频率1Hz~0.1Hz正弦输入,响应延迟平均值56ms,正弦响应速度快
● 幅值1~50°,频率1Hz~0.1Hz正弦输入,响应相位延迟平均值98ms,动态执行速度快
● 幅值1~50°,频率1Hz~0.1Hz正弦输入,幅值绝对误差平均值≤0.5°,正弦响应精度高
经纬恒润自2006年开始从事底盘产品研发业务,经过近20年的技术积累和创新,底盘产品覆盖转向助力系统控制、线性底盘产品、四轮转向和悬架控制等产品。其中,转向助力类产品丰富,支持的转向系统类型包括管柱式 C-EPS、齿条式 R-EPS、双小齿轮式 DP-EPS,覆盖12V、24V、48V系统,包含非冗余和全冗余方案。目前全冗余R-EPS可满足L2-L4级别自动驾驶需求,并已搭载多个中高端车型实现配套量产。

未来,经纬恒润将继续秉持“价值创新,服务客户”的发展理念,依托自身在汽车电子产品行业优势和丰富经验,携手各业界合作伙伴,持续加强研发投入,推动产品迭代升级,为用户提供更加安全、舒适的出行解决方案,为汽车工业的发展贡献自己的一份力量。
了解更多:
请致电010-64840808转6115或发送邮件至market_dept@hirain.com(联系时请说明来自CSDN)