一. 概述
在routing进程所使用的配置文件中,存在如下配置项目:
{"unicast" : "192.168.56.101",..."service-discovery" :{"enable" : "true","multicast" : "224.244.224.245",...}
}其中有 "unicast" : "192.168.56.101"和 "multicast" : "224.244.224.245" 两个通信地址,这两个地址一个是用于vsomeip用于对外通信的单播地址,另一个配置的是service-discovery功能依赖的组播的地址。作为routingmanager的进程需要监听这个单播地址和组播地址所在的网卡的状态,这部分功能主要在netlink_connector中实现,routing_manager_imp依赖netlink_connector来监听网卡状态,并且在网卡状态ready的情况下才会启动routing。netlink_connector中使用到了linux平台的netlink协议用于监听内核上网卡相关事件。
二. netlink protocol
netlink是linux平台上第一种IPC机制,主要用于用户态进程与内核进程通信,此外还可以用于用户态进程之间通信(这个使用unix domain socket)也可以做到。netlink和传统的和内核通信的机制(ioctl,sysfs属性)等不同,netlink是支持全双工的通信的,也就是可以异步通信的,而其他几种传统的内核通信的机制只支持半双工同步通信的方式。在这种情况下,内核甚至支持主动发起通信,而不是由应用发起通信。此外,netlink支持组播的方式,以组播的方式将消息发给多个进程(根据groupid)。
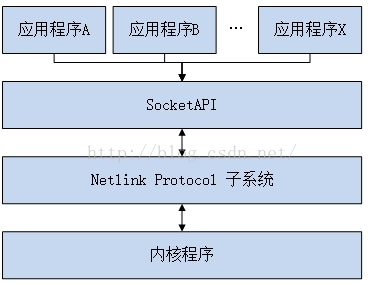
netlink的通信方式使用的是socket API,创建NETLINK socket的时候,需要指定NETLINK socket的协议类型类型()
sock = socket(PF_NETLINK, SOCK_RAW, NETLINK_ROUTE); // NETLINK_ROUTE是协议类型
目前的linxu系统中支持32中协议类型,个人认为这个协议类型就是事件组(网卡/路由/安全/审计/SCSI设备...等等)。
#define NETLINK_ROUTE 0 /* 用于设置和查询路由表等网络核心模块*/
#define NETLINK_UNUSED 1 /* Unused number */
#define NETLINK_USERSOCK 2 /* Reserved for user mode socket protocols,保留用于用户态进程间通信 */
#define NETLINK_FIREWALL 3 /* Unused number, formerly ip_queue */
#define NETLINK_SOCK_DIAG 4 /* socket monitoring */
#define NETLINK_NFLOG 5 /* netfilter/iptables ULOG */
...
...
NETLINK socket需要做bind操作绑定NETLINK的地址,NETLINK地址结构如下:
struct sockaddr_nl {__kernel_sa_family_t nl_family; /* 协议族 AF_NETLINK */unsigned short nl_pad; /* 固定填写0 zero */__u32 nl_pid; /* 端口ID,内核填0,应用进程填PID port ID */__u32 nl_groups; /* 广播组 multicast groups mask */
};
除了nl_pad固定为0以外,其他参数需要填写
struct sockaddr_nl addr;
memset(&addr, 0, sizeof(addr));
addr.nl_family = AF_NETLINK; // 协议族
// RTMGRP_LINK: 网卡UP/DOWN
// RTMGRP_IPV4_IFADDR: ip地址变化
addr.nl_groups = RTMGRP_LINK | RTMGRP_IPV4_IFADDR; // 广播组(事件组中的具体事件)
设置好NETLINK地址后,将其绑定到socket上面
bind(sock, (struct sockaddr *)&addr, sizeof(addr);
接着,就可以使用该socket和内核进行netlink通信了,通过标准recv接口从内核接收消息
while (running && (len = recv(sock, buffer, 4096, 0)) > 0) {nlh = (struct nlmsghdr *)buffer;while (NLMSG_OK(nlh, len) && (nlh->nlmsg_type != NLMSG_DONE)) {// 解析不同类型的NetLink消息...// 下一条消息nlh = NLMSG_NEXT(nlh, len);}
}
close(sock);
三. netlink_connector
netlink_connector类依赖了NETLINK通信机制和内核进行通信,用于监控网卡的状态,根据传入的单播地址和组播地址监控。
首先netlink_connector类中也创建了用于NETLINK通信的socket
class netlink_connector : public std::enable_shared_from_this<netlink_connector> {...
private:...boost::asio::basic_raw_socket<nl_protocol> socket_; // nl_protocol结构体中默认famliy为PF_NETLINK, type为SOCK_RAW...
}void netlink_connector::start() {...socket_.open(nl_protocol(NETLINK_ROUTE), ec); // 协议类型为NETLINK_ROUTE,用于设置和查询路由表等网络核心模块...socket_.bind(nl_endpoint<nl_protocol>(RTMGRP_LINK | // - 当网卡变动时会触发这个多播组RTMGRP_IPV4_IFADDR | RTMGRP_IPV6_IFADDR | // 当ipv4/ipv6地址变动时会触发这个多播组RTMGRP_IPV4_ROUTE | RTMGRP_IPV6_ROUTE | // 当ipv4/ipv6路由变动时会触发这个多播组RTMGRP_IPV4_MROUTE | RTMGRP_IPV6_MROUTE), ec); // 当多播路由发生更新时会触发这个多播组 然后,使用创建的socket接收内核的消息并且解析,根据不同的事件回调上层routing_manager_impl
socket_.async_receive(boost::asio::buffer(&recv_buffer_[0], recv_buffer_size),std::bind(&netlink_connector::receive_cbk,shared_from_this(),std::placeholders::_1,std::placeholders::_2)
);void netlink_connector::receive_cbk(boost::system::error_code const &_error,std::size_t _bytes) {while ((NLMSG_OK(nlh, len)) && (nlh->nlmsg_type != NLMSG_DONE)) {char ifname[IF_NAMESIZE];switch (nlh->nlmsg_type) { // 根据多播组内的消息类型分别处理case RTM_NEWADDR: { // IP地址变化// 解析出消息中的IP地址,如果该IP是VSOMEIP配置的单播地址,则往下// 根据IP地址找到网卡,获取其状态(UP/DOWN)// 通知上层handler处理(handler第一个参数标志是单播还是组播地址的网卡)}break;case RTM_NEWLINK: { // 网卡变化// 获取网卡IP,如果该IP是VSOMEIP配置的单播地址,则往下// 获取网卡状态// 通知上层handler处理}break;case RTM_NEWROUTE: { // 路由添加check_sd_multicast_route_match(...) {// 读取路由项的目标地址(RTA_DST),判断地址是否为SD的组播地址// 读取路由项的输出网络设备索引,判断设备索引是否为单播地址通信使用的网络设备的索引// 读取路由项的网关地址// 1. 如果单播地址通信使用的网络设备被加到SD的组播中,返回true// 2. 如果单播地址通信使用的网络设备被添加到组播,但是组播地址长度为0,返回true(使用默认路由作为SD的地址)// 3. 不满足上面两种情况,返回false}// check_sd_multicast_route_match返回true,则通知上层组播准备好了}break;case RTM_DELROUTE: { // 路由删除check_sd_multicast_route_match(...) {...}// check_sd_multicast_route_match返回true,则通知上层组播未准备好}break;...}
}
对于netlink_connector,其监听网卡以及组播路由的变化事件。routing_manager_impl则是这些事件的消费者
void routing_manager_impl::start() {...netlink_connector_->register_net_if_changes_handler(std::bind(&routing_manager_impl::on_net_interface_or_route_state_changed,this, std::placeholders::_1, std::placeholders::_2, std::placeholders::_3));...
}