本文链接:个人站 | 简书 | CSDN
版权声明:除特别声明外,本博客文章均采用 BY-NC-SA 许可协议。转载请注明出处。
最近打算分享一些基于深度学习的时间序列预测方法。这是第一篇。
DeepAR 是 Amazon 于 2017 年提出的基于深度学习的时间序列预测方法,目前已集成到 Amazon SageMaker 和 GluonTS 中。前者是 AWS 的机器学习云平台,后者是 Amazon 开源的时序预测工具库。
传统的时间序列预测方法(ARIMA、Holt-Winters’ 等)往往针对一维时间序列本身建模,难以利用额外特征。此外,传统方法的预测目标通常是序列在每个时间步上的取值。与之相比,基于神经网络的 DeepAR 方法可以很方便地将额外的特征纳入考虑,且其预测目标是序列在每个时间步上取值的概率分布。在特定场景下,概率预测比单点预测更有意义。以零售业为例,若已知商品未来销量的概率分布,则可以利用运筹优化方法推算在不同业务目标下的最优采购量,从而辅助决策(详见《如何在商品采购中考虑不确定性》、《报童问题》以及《报童问题的简单解法》)。
本文将简要地介绍一下 DeepAR 模型,并给出一个 demo。如果希望了解更多细节,建议直接阅读 Amazon 的论文 Deep AR: Probabilistic Forecasting with Autoregressive Recurrent Networks。
Model
用 z i , t z_{i,t} zi,t 表示第 i i i 个序列在时间步 t t t 的值, x i , t x_{i, t} xi,t 表示特征, t 0 t_0 t0 表示预测开始时刻。DeepAR 基于自回归循环神经网络预测 z i , t z_{i,t} zi,t 的概率分布1,用似然函数 l ( z i , t ∣ θ i , t ) l(z_{i, t}|\theta_{i, t}) l(zi,t∣θi,t) 表示。
模型如下图所示,左边是训练过程,右边是预测过程。
训练时,在每一个时间步 t t t,网络的输入包括特征 x i , t x_{i, t} xi,t 、上一个时间步的取值 z i , t − 1 z_{i, t-1} zi,t−1,以及上一个时间步的状态 h ⃗ i , t − 1 \vec h_{i, t-1} hi,t−1。先计算当前的状态 h ⃗ i , t = h ( h ⃗ i , t − 1 , z i , t − 1 , x i , t ) \vec h_{i, t}=h(\vec h_{i, t-1}, z_{i, t-1}, x_{i, t}) hi,t=h(hi,t−1,zi,t−1,xi,t) ,进而计算似然 l ( z ∣ θ ) l(z|\theta) l(z∣θ) 的参数 θ i , t = θ ( h ⃗ i , t ) \theta_{i, t} = \theta(\vec h_{i, t}) θi,t=θ(hi,t),最后通过最大化对数似然
L = ∑ i ∑ t log l ( z i , t ∣ θ ( h ⃗ i , t ) ) \mathcal L = \sum\limits_i\sum\limits_t\log l(z_{i,t}|\theta(\vec h_{i, t})) L=i∑t∑logl(zi,t∣θ(hi,t))
来学习网络的参数。
训练完成后,将 t < t 0 t<t_0 t<t0 的历史数据喂入网络,获得初始状态 h ⃗ i , t 0 − 1 \vec h_{i, t_0-1} hi,t0−1,就可以使用祖先采样(ancestral sampling)获取预测结果了:对于 t 0 , t 0 + 1 , ⋯ , T t_0, t_0+1, \cdots, T t0,t0+1,⋯,T,在每一个时间步随机采样得到 z ~ i , t ∼ l ( ⋅ ∣ θ i , t ) \tilde z_{i,t}\sim l(\cdot|\theta_{i,t}) z~i,t∼l(⋅∣θi,t),这个采样值被作为下一个时间步的输入。重复这个过程,就可以得到一系列 t 0 ∼ T t_0\sim T t0∼T 的采样值,利用这些采样值可以计算所需的目标值,如分位数、期望等。
θ ( h ⃗ i , t ) \theta(\vec h_{i, t}) θ(hi,t) 的具体形式取决于似然函数 l ( z ∣ θ ) l(z|\theta) l(z∣θ),而似然函数需要根据数据本身的统计特征来选择。如果选择 Gaussian 分布,则 θ = ( μ , σ ) \theta=(\mu, \sigma) θ=(μ,σ),
l G ( z ∣ μ , σ ) = 1 2 π σ 2 exp ( − ( z − μ ) 2 2 σ 2 ) μ ( h ⃗ i , t ) = w ⃗ μ T h ⃗ i , t + b μ σ ( h ⃗ i , t ) = log ( 1 + exp ( w ⃗ σ T h ⃗ i , t + b σ ) ) \begin{aligned} l_G(z|\mu, \sigma) &= \frac{1}{\sqrt{2 \pi\sigma^2}}\exp\left(\frac{-(z- \mu)^2}{2\sigma^2}\right)\\ \mu(\vec h_{i,t}) &= \vec w_\mu^T\vec h_{i, t} + b_\mu\\ \sigma(\vec h_{i,t}) &= \log(1+\exp(\vec w_\sigma^T\vec h_{i, t} + b_\sigma)) \end{aligned} lG(z∣μ,σ)μ(hi,t)σ(hi,t)=2πσ21exp(2σ2−(z−μ)2)=wμThi,t+bμ=log(1+exp(wσThi,t+bσ))
Code
Amazon 在 GluonTS 中提供了基于 MXNet 构建的 DeepAR 模型。由于不太熟悉 MXNet,这里提供一个基于 TensorFlow 构建的简单 demo。
模型和损失函数如下:
import tensorflow as tf
import tensorflow_probability as tfpclass DeepAR(tf.keras.models.Model):"""DeepAR 模型"""def __init__(self, lstm_units):super().__init__()# 注意,文章中使用了多层的 LSTM 网络,为了简单起见,本 demo 只使用一层self.lstm = tf.keras.layers.LSTM(lstm_units, return_sequences=True, return_state=True)self.dense_mu = tf.keras.layers.Dense(1)self.dense_sigma = tf.keras.layers.Dense(1, activation='softplus')def call(self, inputs, initial_state=None):outputs, state_h, state_c = self.lstm(inputs, initial_state=initial_state)mu = self.dense_mu(outputs)sigma = self.dense_sigma(outputs)state = [state_h, state_c]return [mu, sigma, state]def log_gaussian_loss(mu, sigma, y_true):"""Gaussian 损失函数"""return -tf.reduce_sum(tfp.distributions.Normal(loc=mu, scale=sigma).log_prob(y_true))
实例化模型,指定优化器,就可以训练了:
LSTM_UNITS = 16
EPOCHS = 5# 实例化模型
model = DeepAR(LSTM_UNITS)# 指定优化器
optimizer = tf.keras.optimizers.Adam()# 使用 RMSE 衡量误差
rmse = tf.keras.metrics.RootMeanSquaredError()# 定义训练步
def train_step(x, y):with tf.GradientTape() as tape:mu, sigma, _ = model(x)loss = log_gaussian_loss(mu, sigma, y)grads = tape.gradient(loss, model.trainable_variables)optimizer.apply_gradients(zip(grads, model.trainable_variables))rmse(y, mu)# 数据处理(略)
# train_data = do_something()# 训练
for epoch in range(EPOCHS):for x, y in train_data:train_step(x, y)print('Epoch %d, RMSE %.4f' % (epoch + 1, rmse.result()))rmse.reset_states()
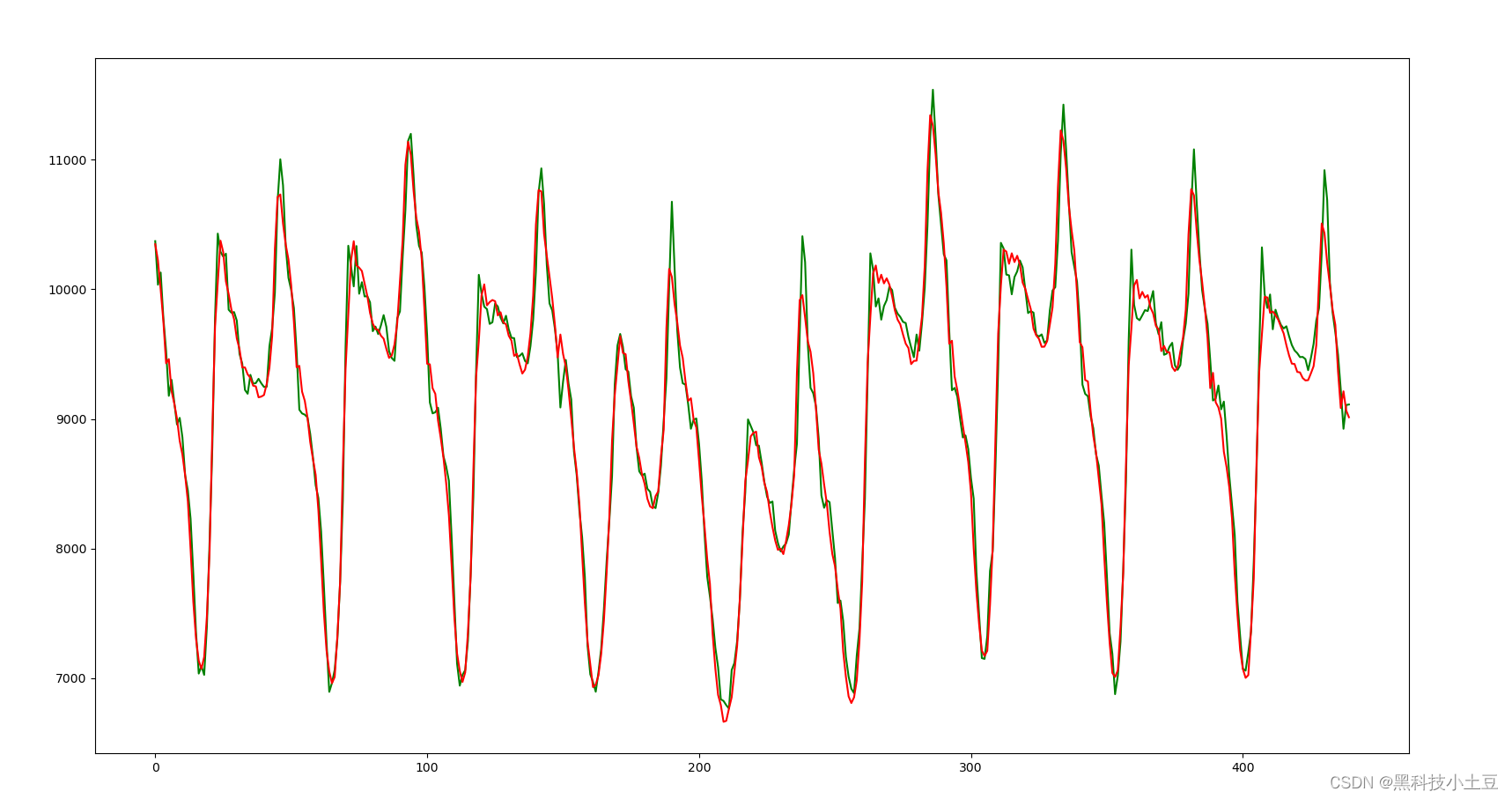
为了验证代码,我们随机生成一个带有周期的时间序列。下图展示了这个序列的一部分数据点。
简单起见,我们没有加入额外的特征。
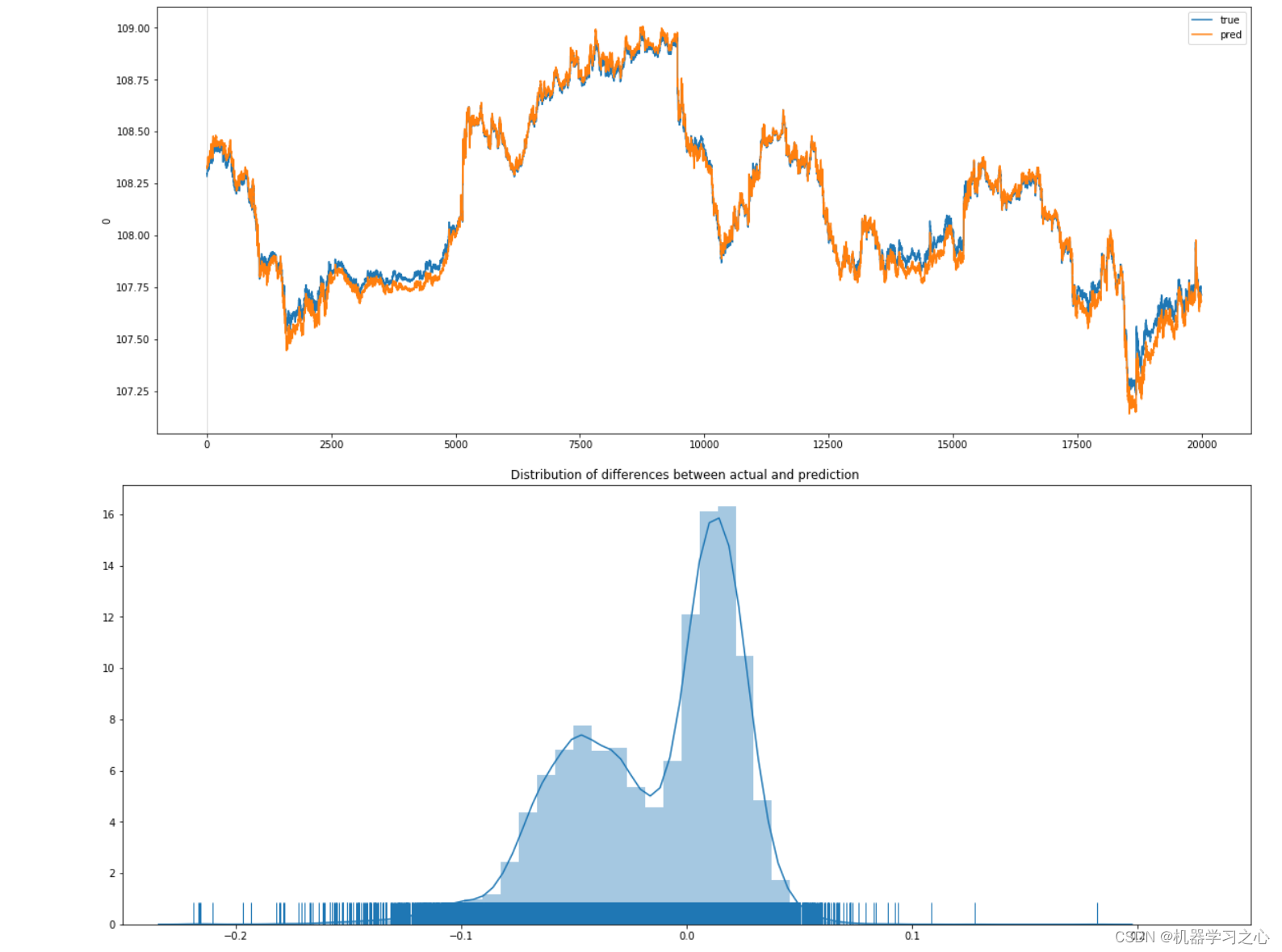
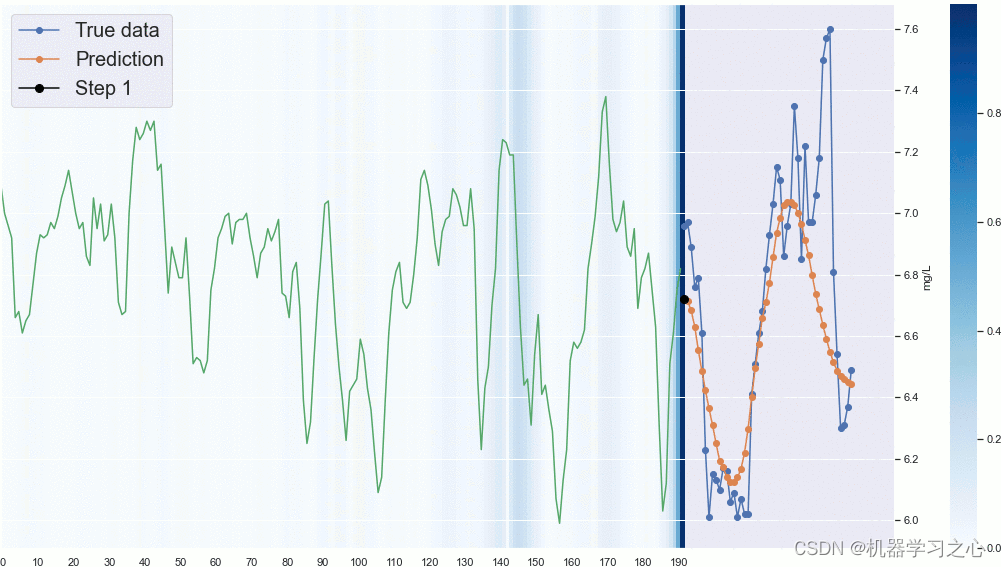
经过训练后用于预测,效果如下图所示,其中阴影部分表示 0.05 分位数 ~ 0.95 分位数的区间。
事实上也可以有其它的预测目标,例如分位数回归。 ↩︎