“在几何计算、图形渲染、动画、游戏开发等领域,常需要进行元素的平移、旋转、缩放等操作,一种广泛应用且简便的方法是使用仿射变换进行处理。相关的概念还有欧拉角、四元数等,四元数在图形学中主要用于解决旋转问题,特别是在三维空间中绕任意轴的旋转,且四元数与仿射变换可以相互转换。”
-
图形几何之美系列:三维实体结构表达
-
图形几何之美系列:仿射变换矩阵
-
图形几何之美系列:仿射变换矩阵(二)
上文我们讲述了仿射变换矩阵的原理、构成以及局部坐标系到世界坐标系的转换。
本文我们将继续聊聊矩阵的使用注意事项,比如先转后偏的用法,并从机制原理的角度探究其原因。
1.前言
如果一次仿射变换中存在多种类型的姿态变换,需要先进行矩阵左上角的3X3部分(缩放、旋转、镜像、非均匀变换)的构造处理,最后再叠加偏移。
这是我们从一些书籍或老司机口中得知的重要经验,大白话就是“先转后偏”,那么为什么要这样呢?先偏后转不行吗?还是先转后偏有其不可忽略的独门绝技?
如果先偏移,则需要基于偏移值的坐标点进行矩阵左上角3X3部分的构造,这将变得复杂的多,这对于大多数人来说不可接受,毕竟我们很多时候要做的是化繁为简,同时提高精度。
下面我们对比下先转后偏和先偏后转的特点和区别。
2.先转后偏
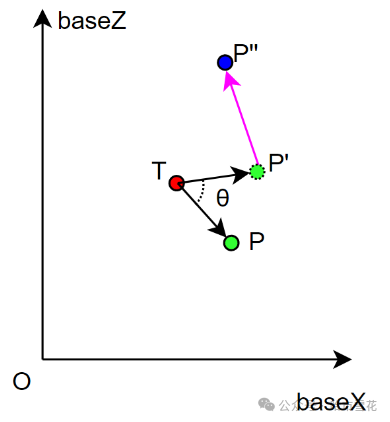
如上图所示,我们对点P进行仿射变换,同时包含旋转和平移,即绕点T旋转Θ,然后平移向量P'P''。
如果是先旋转后偏移:(1)P绕T旋转θ;(2)移动P'P'';即可得到最终姿态P''。
补充
构造P绕T旋转θ的仿射变换矩阵时:
可以先构造偏移TO的偏移矩阵(这样T偏移到了原点,而P可以绕原点旋转了)TrsT2O;
然后构造P绕原点旋转θ的3X3矩阵,再叠加OT偏移得到TrsRotate_and_O2T;嘿嘿,这又是一个先转后偏的实践。
左乘上述两个矩阵得到结果矩阵:TrsRotate_and_O2T x TrsT2O。
3.先转后偏
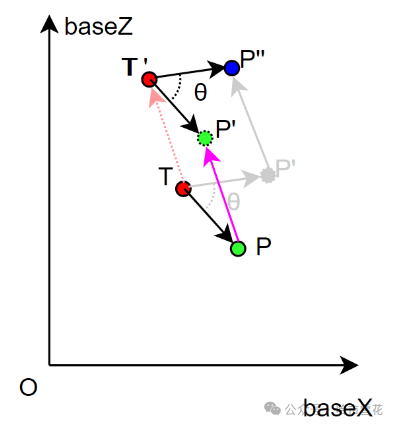
如果是先偏后转,问题将变得复杂,在偏移P的同时需要对T也作相同力度的偏移,没错,进行“先偏”操作时,你需要关心其他姿态变换元素,如“绕T旋转的元素T”;然后再绕T'点旋转θ。
记住,我们是要化繁为简,以清晰便捷的过程去处理问题,这会降低错误的发生,也降低了学习成本,提高学习工作体验。
谁不愿意开心的学习和工作呢?对,还有开心的生活~
补充
构造先偏后转的矩阵时:
先构造偏移**P'P''**的矩阵TrsP'2P'',同时作用于P和T,分别得到P'和T';
构造绕T'旋转θ的矩阵,好吧,这和上述第1步+第2步类似,执行吧......我们得到了TrsT'2O和TrsRotate_and_O2T';
左乘上述三个矩阵得到结果矩阵:TrsRotate_and_O2T' x TrsT'2O x TrsP'2P''。
思考
思考以上上述两种方案的特点和区别。为什么我们没有把TrsT'2O x TrsP'2P''进行合并呢?合并后将是1个偏移矩阵啊,那最后不也是两个矩阵相乘吗?
4.继续探究
如果上面的内容你已经明白,那么我们来看一个类似的场景:P绕原点旋转θ,再偏移P'P''。
这个场景更典型,实际上上述先转后偏的第2步就是这样一个场景,绕原点旋转θ,再叠加偏移,这比较简单的构造出了一个矩阵,也就是结果矩阵。而先偏再转将带来很多工作,得不偿失,或许该换个词表达。
提示
读者可以自行推导这个典型场景中先偏后转的矩阵构造和运算过程,加深理解。
注意,如果同时有旋转、缩放、镜像、不均匀变换时(如透视投影)时,这几种姿态变换没有先后顺序的要求,你可以先转后缩,也可以先缩后转。想一想4x4矩阵的构造,这几种类型都是左上角3x3部分,该部分3列实际上是三个基向量。
欢迎关注,图形几何之美系列 将继续更新......
-
图形几何之美系列:三维实体结构表达
-
图形几何之美系列:仿射变换矩阵
-
图形几何之美系列:仿射变换矩阵(二)
-
图形几何之美系列:仿射变换矩阵之先转后偏